Изобретение относится к техническим средствам освоения Мирового океана, в частности к подводным телеуправляемым аппаратам.
Известны подводные аппараты с дистанционным управлением для решения различных задач, например подводный аппарат, входящий в состав оборудования подводного телеуправляемого комплекса многоцелевого назначения CONSUB, созданного для технического обслуживания подводных исследований 1. Бортовое оборудование подводного аппарата включает в себя систему удержания подводного аппарата на постоянном расстоянии от дна, эхолот, глубиномер, магнитометры, телевизионную аппаратуру, фотокамеру, навигационную систему, 12-функциональ- ный манипулятор. Перемещение аппарата обеспечивает четыре подруливающих устройства. Состав оборудования аппарата может меняться в зависимости от цели подводных исследований.
Однако данный подводный аппарат не предназначен для подъема крупногабаритных предметов, что значительно сужает его технические возможности.
Наиболее близким по технической сущности и достигаемому положительному эффекту к изобретению является подводный аппарат, содержащий корпус, движители для перемещения в трех направлениях, блоки плавучести, клешневой захват с гидроприводом, контейнеры с энергетическим и навигационным оборудованием, приборы для обнаружения подводных объектов 2.
Недостатком данного аппарата является то. что шарнирно закрепленный в носовой оконечности аппарата клешневой захват не позволяет клешням вращаться в вертикальной плоскости, параллельной диаметральной плоскости аппарата, что в свою очередь не дает возможности достаточно удобно и качественно адаптировать подводный аппарат при захвате объектов, лежащих на дне, сужая тем самым сферу его применения.
Цель изобретения - повышение эффективности работ по подъему крупногабаритных объектов, лежащих на дне или погруженных в донный грунт.
Указанная цель достигается тем, что в известном устройстве, содержаа .ем корпус, движители для перемещения в трех направлениях, блоки плавучести, энергетическое и навигационное оборудование, приборы для обнаружения подводных объектов и размещенный в носовой оконечности аппарата клешневой захват, последний выполнен из верхней и нижней групп клешней, нижние
из которых неподвижны и направлены вниз, а верхние шарнирно установлены с возможностью вертикального перемещения посредством одних гидроцилиндров и с
возможностью вращения посредством других гидроцилиндров в плоскостях, параллельных диаметральной плоскости аппарата.
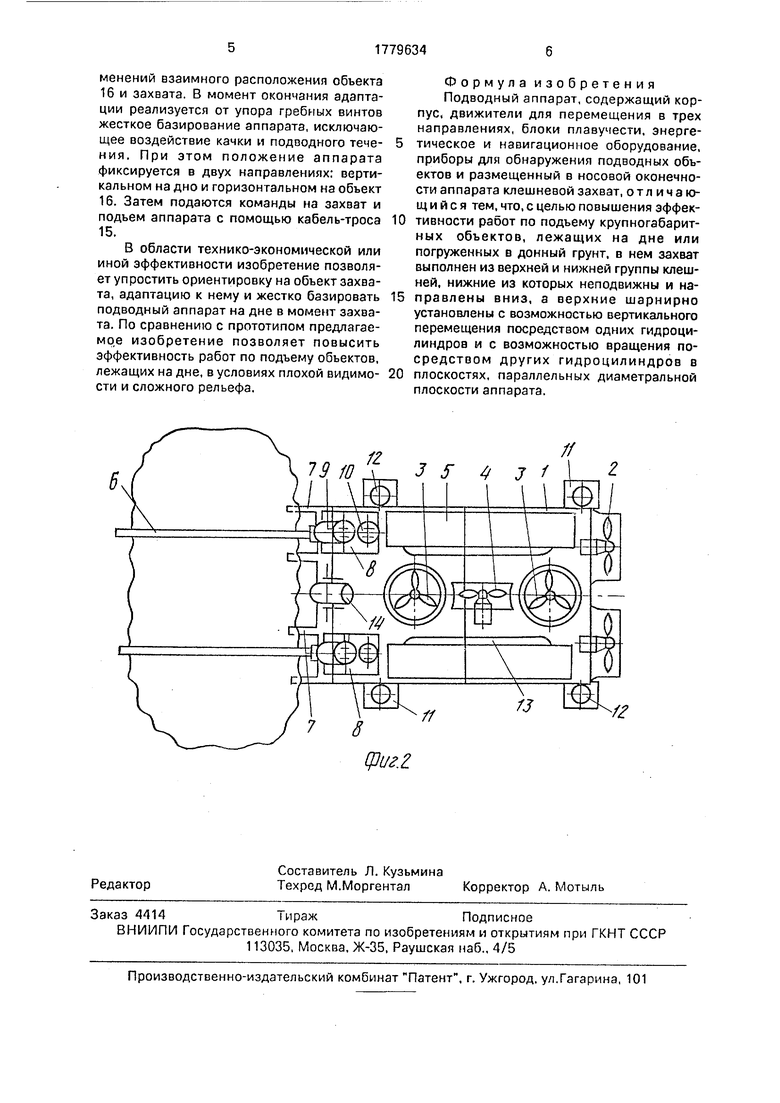
На фиг. 1 изображен подводный аппа0 рат, вид сбоку; на фиг. 2 - то же, вид сверху. Подводный аппарат содержит корпус 1, движители горизонтального 2, вертикального 3 и бокового 4 ходов, блоки 5 плавучести, подвижные клешни 6 и неподвижные клеш5 ни 7 клешневого захвата, рамы 8 подвижных клешней, гидроцилиндры 9 для поворота клешней 6, гидроцилиндры 10 для перемещения рам 8, выдвижные лапы 11 с; гидроцилиндрами 12, контейнер 13 с
0 энергетическим и навигационным оборудованием, приборы 14 для обнаружения подводных объектов, кабель-трос 15.
Аппарат прикреплен к кабелю-тросу 15, имеет небольшую избыточную плавучесть
5 (при определенном наборе блоков плавучести 5), может под действием движителей 2, 3 и 4 перемещаться под водой в трех направлениях, изменять курс, дифферент и становиться на дно, опираясь на выдвижные лапы
0 11, Клешневой захват, закрепленный на но- совомторце аппарата, имеет нижние неподвижные клешни 7, скрепленные с корпусом 1, и верхние б, шарнирно закрепленные в подвижных рамах 8 на осях, лежащих гори5 зонтально в носовой поперечной плоскости аппарата. Таким образом, клешни б имеют возможность поворачиваться под действием гидроцилиндров 9 и перемещаться вертикально на рамах 8 от гидроцилиндров 10
0 в продольных плоскостях.
Подводный аппарат при сближении с обнаруженным объектом 16 и захвате его действует под контролем приборов навигации и обнаружения следующим образом.
5 Выполняют с помощью движителей 2, 3 и 4 маневр захода и наведения аппарата с боковой стороны объекта 16. Опускают аппарат на дно с поднятыми верхними клешнями 6, сближают до касания с объектом 16. Под
0 действием этого под воздействием движителей 2, 3 , 4 происходит адаптация аппарата к объекту 16, который может лежать не горизонтально, а погруженным частично и на неровном дне. Одновременно аппарат
5 адаптируют и к участку дна, прилегающему к объекту 16, путем регулировки длины лап 11 с помощью гидроцилиндров 12 и положения клешней б по высоте. При этом производится варьирование последовательностью движений в зависимости от изменений взаимного расположения объекта 16 и захвата. В момент окончания адаптации реализуется от упора гребных винтов жесткое базирование аппарата, исключающее воздействие качки и подводного тече- ния. При этом положение аппарата фиксируется в двух направлениях: вертикальном на дно и горизонтальном на объект 16. Затем подаются команды на захват и подъем аппарата с помощью кабель-троса 15.
В области технико-экономической или иной эффективности изобретение позволяет упростить ориентировку на объект захвата, адаптацию к нему и жестко базировать подводный аппарат на дне в момент захвата. По сравнению с прототипом предлагаемое изобретение позволяет повысить эффективность работ по подъему объектов, лежащих на дне, в условиях плохой видимо- сти и сложного рельефа.
Формула изобретения Подводный аппарат, содержащий корпус, движители для перемещения в трех направлениях, блоки плавучести, энергетическое и навигационное оборудование, приборы для обнаружения подводных объектов и размещенный в носовой оконечности аппарата клешневой захват, отличающийся тем, что, с целью повышения эффективности работ по подъему крупногабаритных объектов, лежащих на дне или погруженных в донный грунт, в нем захват выполнен из верхней и нижней группы клешней, нижние из которых неподвижны и направлены вниз, а верхние шарнирно установлены с возможностью вертикального перемещения посредством одних гидроцилиндров и с возможностью вращения посредством других гидроцилиндров в плоскостях, параллельных диаметральной плоскости аппарата.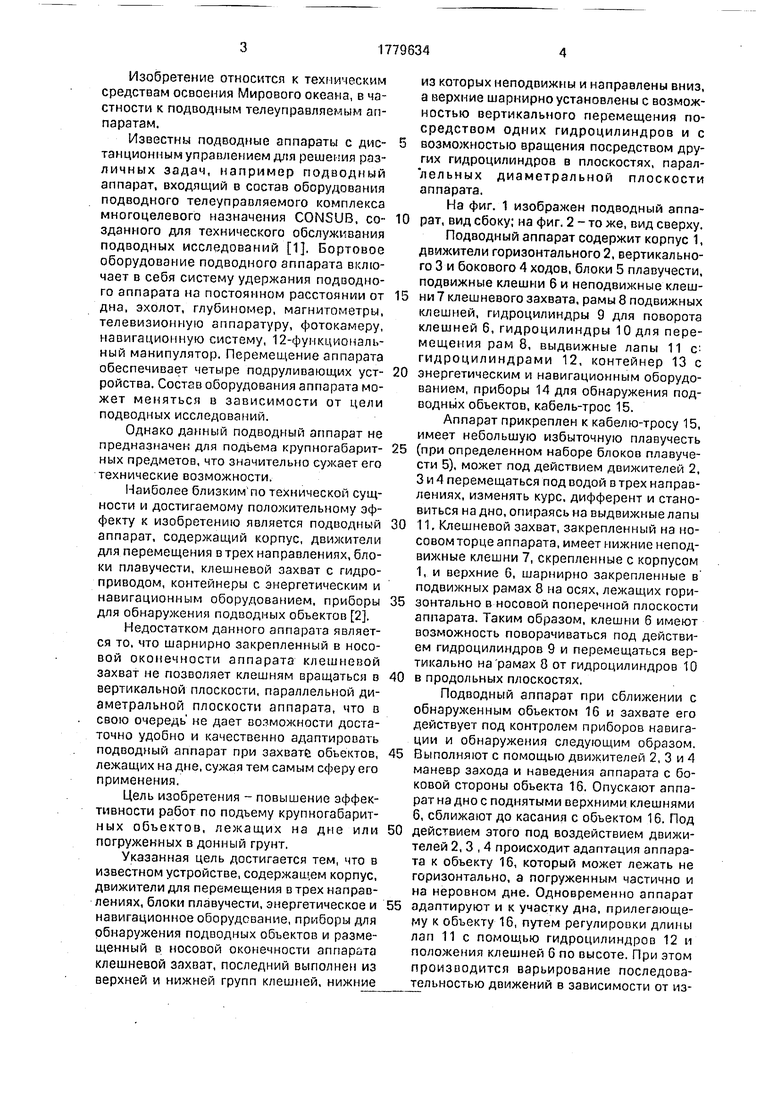
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| ПОДВОДНЫЙ АППАРАТ ДЛЯ УНИЧТОЖЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНОГО СТАЦИОНАРНОГО ОБЪЕКТА | 2017 |
|
RU2670192C9 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
Изобретение относится к техническим средствам освоения Мирового океана, в частности к подводным телеуправляемым аппаратам. Целью изобретения является повышение эффективности работ по подъему крупногабаритных объектов, лежащих на дне или погруженных в донгый грунг. Цель достигается тем, что о подводном аппарате, содержащем корпус 1, движители для перемещения в трех направлениях, энергетическое, навигационное оборудование и приборы дпл обнаружения подводных объектов, размещенный в носовой оконечности клешневоп захват выполнен из верхней и гижнсй групп клешней, нижние 7 из которых неподвижны и направлены вниз, а верхние 6 шарнирно установлены с возможностью вертикального перемещения посредством одних гидроцилиндров 10 и с возможностью сращения с помощью других гидроцилинцров 9 в плоскостях, пзралпель- ных диаметральной плоскости аппарата. 2 ил. 10 3 # (Л С ГЛ1 I-.VчJ , 11 О СО №tf
//
фиг2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Милн П | |||
| Подводные инженерные исследования | |||
| Л.: Судостроение, 1984, с | |||
| Питательный кран для вагонных резервуаров воздушных тормозов | 1921 |
|
SU189A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Heinz М„ Marsland G.E | |||
| DAVID, ein neues Unterwasser - Arbeitsgerut Zur Freitaucher // Meerestechnik | |||
| - Bci | |||
| Насос | 1917 |
|
SU13A1 |
| Солесос | 1922 |
|
SU29A1 |
