с;
fe
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1989 |
|
RU2022231C1 |
| Устройство измерения перемещения | 1982 |
|
SU1334045A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА В ПОСЛЕДОВАТЕЛЬНОСТЬ ИМПУЛЬСОВ | 1991 |
|
RU2025043C1 |
| Фотоэлектрический способ измерения линейных и угловых перемещений и устройство для его осуществления | 1974 |
|
SU744225A1 |
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Устройство автоматической коррекции размерной настройки токарных многоинструментальных станков с ЧПУ | 1981 |
|
SU1020205A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Преобразователь перемещения в код | 1989 |
|
SU1777240A1 |
| Устройство для автоматической фокусировки оптической системы записи-воспроизведения информации | 1990 |
|
SU1802877A3 |
Изобретение относится к измерительной технике, конкретно к измерительным преобразователям линейных перемещений. Цель изобретения - повышение точности измерения перемещения. Во время перемещения в программируемой схеме задаются интервалы перемещения, через которые в систему измерения подаются дополнительные импульсы, корректирующие систематическую составляющую погрешности преобразователя. 2 ил.
Изобретение относится к измерительной технике и предназначено для использования в устройствах измерения линейных величин.
Известно устройство для функционального контроля цифровых объектов, содержащее блок связи с объектом контроля, блок памяти текущих параметров, блок вычисления параметров и блок вывода контрольной информации. Устройство обеспечивает запоминание текущих параметров объекта, их сравнение с эталонной информацией и вырабатывает информацию коррекции (см. а.с. СССР № 792255, кл. G 01 В 11/00, 1980).
Недостатком этого устройства при применении для коррекции погрешностей преобразователей перемещения является необходимость хранения и обрабатывания больших объемов цифровой информации, а это требует сложной и дорогостоящей электронной аппаратуры.
Наиболее близким к предлагаемому является измерительный преобразователь перемещения, содержащий измерительную и индикаторную части, интерполятор и реверсивный счетчик. При перемещении измерительного растра в индикаторной части формируются сигналы, сдвинутые по фазе на п /2. Интерполятор умножает пространственную частоту сигналов и формирует измерительные импульсы суммирования и вычитания, которые соответственно суммируются и вычитаются в реверсивном счетчике (см. фотоэлектрические преобразователи информации под редЛ.Н.Преснухина, М.: Машиностроение, 1974, с.180, рис.93).
Недостатком.этого преобразователя является снижение точности измерения из-за отсутствия коррекции погрешности шага измерительного растра.
V| VJ
Ю Ю
ю
Целью изобретения является увеличение точности измерения путем коррекции погрешности шага измерительного растра. Указанная цель достигается тем, что в преобразователе, содержащем измерительный растр и индикаторную часть, интерполятор и реверсивный счетчик, согласно изобретению между интерполятором и счетчиком включен коммутатор, содержащий два дополнительных входа, один из которых, предназначен для определения знака коррекции, подключен к выходу сигнала знака коррекции программируемой схемы, второй предназначен для определения величины коррекции, подключен через формирователь корректирующих импульсов к выходу корректирующих сигналов программируемой схемы, а входы программируемой схемы подключены к выходам реверсивного счетчика параллельно индикатору измеряемой величины перемещения.
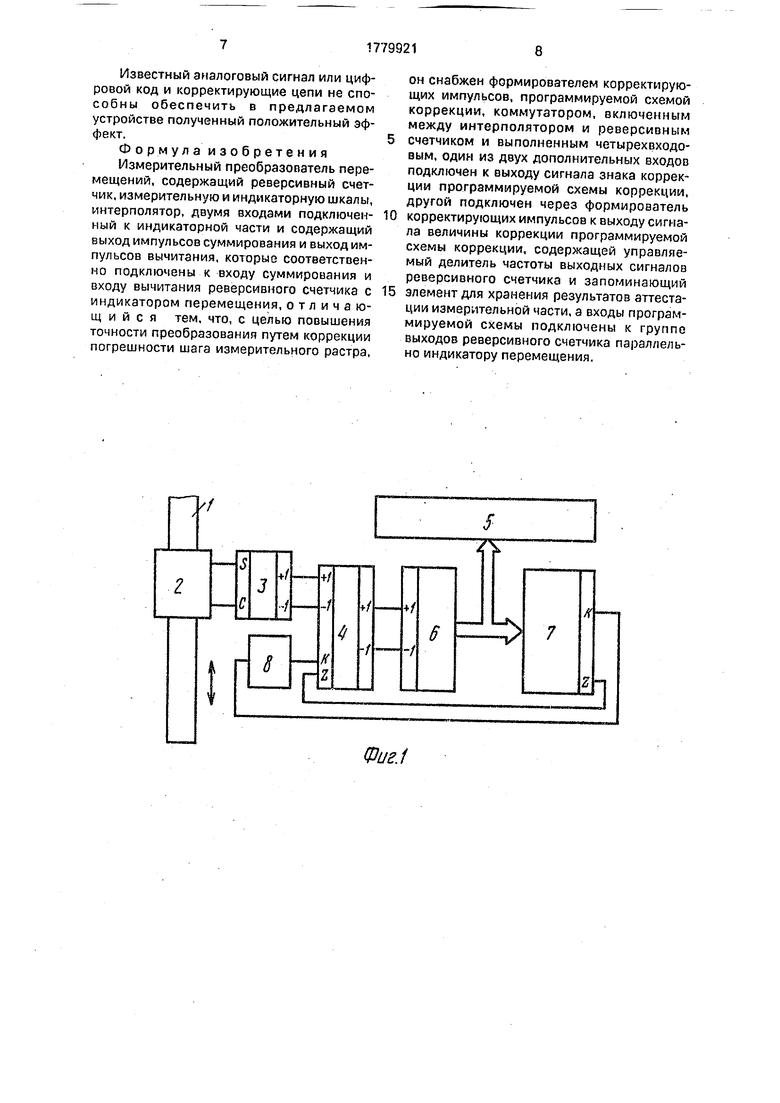
На фиг.1 показана схема измерительного преобразователя перемещения; на фиг.2 -диаграммы, объясняющие работу устройства и коррекцию погрешности преобразователя перемещения.
Преобразователь содержит измерительный растр 1 (фиг.1) и индикаторную часть 2, выходы которой подключены к соот- петствующим входам интерполятора 3. К выходу измерительных импульсов суммирования (+1) интерполятора 3 подключен вход (+1) коммутатора 4, а к выходу измерительных импульсов вычитания (-1) интерполятора 3 подключен соответствующий вход (-1) коммутатора 4. Выходы коммутатора 4 подключены к соответствующим входам индикатора 5 величины перемещения через реверсивный двоичный счетчик 6. К выходам счетчика 6 подключены входы программируемой схемы коррекции 7.
Выход знака коррекции (z) программируемой схемы 7 подключен к соответствующему входу (z) коммутатора 4, а выход корректирующего сигнала (К) программируемой схемы 7 подключен к входу формирователя импульса коррекции 8, выход которого подключен к входу корректирующего импульса (К) коммутатора 4.
Измерительный преобразователь перемещений работает следующим образом.
При перемещении измерительного растра 1 на выходах индикаторной части 2 формируются два синусоидальные сигналы, сдвинутые по фазе на п 12 относительно друг друга. Эти сигналы имеют одинаковые периоды, соответствующие смещению измерительной части относительно индикаторной части преобразователя на один шаг.
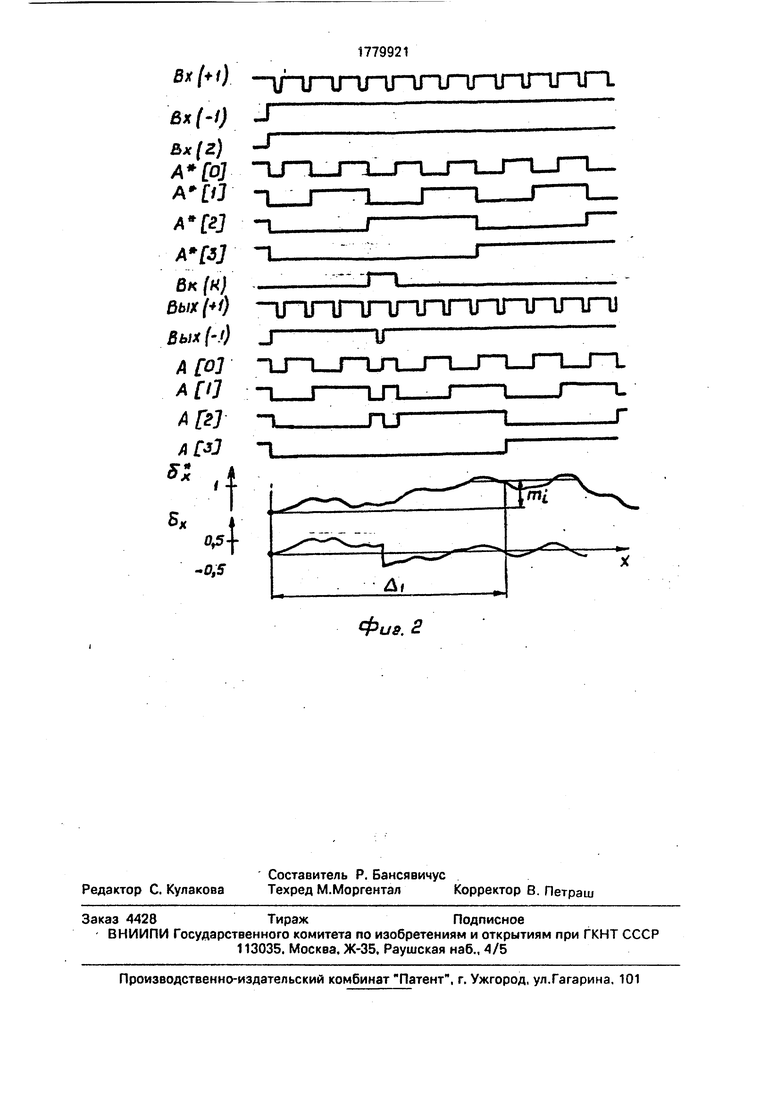
Интерполятор 3 делит пространственный период сигналов индикаторной части на число интерполирования N и формирует на выходах измерительные импульсы
(см.фиг.2, диагр. Вх (+1), Вх (-1). Период измерительных импульсов соответствует величине одной дискреты квантирования перемещения. Появление отрицательных импульсов на выходе (+1) интерполятора 3
0 соответствует перемещению объекта измерения вперед, при этом на выходе (-1) интерполятора формируется верхний уровень сигнала, подтверждающий направление движения объекта. Таким же образом появ5 ляются отрицательные измерительные импульсы на выходе (-1) и направление перемещения объекта подтверждающий верхний уровень сигнала на выходе (+1) при перемещении объекта назад.
0 При нижнем уровне сигнала на входе знака коррекции (z) коммутатора 4 и перемещении объекта измерения вперед (см. фиг.2 левую часть до линии реверса), измерительные и корректирующие импульсы поступэ5 ют на вход (+1) счетчика б, а на его входе (-1) поддерживается верхний уровень сигнала. При этом каждый измерительный или корректирующий импульсы, поступающий на вход (+1) счетчика б увеличивает на единицу
0 его содержимое, которое отображается в индикаторе 5 как результат измерения перемещения. Формирование двоичного кода величины перемещения на выходах, младших разрядов реверсивного счетчика пока5 зано на фиг.2, диаграммы А(00), А(01), А(02), А(03).
При нижнем уровне сигнала на входе знака (z) коммутатора 4 и перемещении объекта измерения назад, измерительные и
0 корректирующие импульсы поступают на вход (-1) счетчика 6, а на входе (+1) поддерживается верхний уровень сигнала и каждый импульс уменьшает содержимое счетчика 6 на единицу.
5 При верхнем уровне сигнала на входе знака коррекции (z) коммутатора 4, измерительные импульсы поступают на вход (+1), а корректирующие - на вход (-1) счетчика б, либо наоборот, зависимо от направления
0 передвижения измеряемого объекта.
Эти измерительные импульсы поступают в коммутатор, где они суммируются или вычитаются с корректирующими импульсами (см.фиг.2, диагр. Вх (К)), поступающими
5 на вход (К) коммутатора, зависимо от уровня сигнала (см.фиг.2 диагр. Bx(z). поступающего на вход знака (z). Так как длительность измерительного импульса несколько раз меньше периода их следования (что объясняется ограниченной скоростью перемещения измерительного растра), а импульс коррекции начинает формироваться после окончания очередного измерительного импульса, потому исключено совпадение измерительного корректирующего импульса во времени.
Последовательности измерительных импульсов дополнена корректирующими импульсами (см. фиг.2 диагр. Вых (+1), Вых (-1)) поступают с выходов коммутатора на соответствующие входы (+1) и (-1) реверсивного счетчика 6 для их суммирования и вычитания соответственно.
Характеристика погрешности измерительного растра может быть апроксимиро- вана прямыми линиями в определенных Отрезках перемещения (фиг.2б). Таким образом, погрешность измерительного растра в каждом интервале описывается величиной погрешности в конце интервала и ее знаком. Тогда погрешность измерения перемещения растра произвольной величины X выражается формулой:
3(х) 2
(-DSim,
- 1
п - целая часть данного соотношения ( -г);
5(х)- погрешность измерения при перемещении измерительного растра на величину X; А - произвольно выбранная величина интервала коррекции; mi - значение погрешности измерения полугенз при аттестации после перемещения растра на величину А; Si - логическая Функция знака коррекции;
О, когда m 0;
S,- {
1 1, когда гткО,
При перемещении измерительного растра 1, на выходах реверсивного счетчика 6 формируется дискретный код, соответствующий величине перемещения, Старшие разряды упомянутого кода определяют номер интервала коррекции. В программируемой схеме 7 по заданному номеру из запоминающего устройства изолекается одно слово информации, управляющей процессом коррекции. Считанное слово информации сохраняет постоянное значение в пределах всего интервала коррекции. Один из разрядов считанного слова информации через выход знака (z) поступает на вход (z) коммутатора 4. Остальные разряды слова определяют двоичный код на группе выходов (от АП-ТОГО до Am-n-того) реверсивного счетчика С, при котором на выходе (К) программируемой схемы 7 формируется
сигнал коррекции, запускающий формирователь импульса 8.
Формирователь корректирующего импульса 8 формирует одиночные импульсы 5 постоянной длительности, как при положительном, так и при отрицательном изменении уровня сигнала на входе, что обеспечивает полную симметрию работы схемы коррекции при реверсе перемещения
0 измеряемого объекта. Соотношение частот измерительных и корректируемых импульсов зависит от слова информации, записанного в запоминающий элемент схемы 7 в процессе аттестации измерительного рас5 тра. Потому в пределах определенного интервала перемещения могут быть сформированы необходимые числа импульсов коррекции при постоянном значении слова информации.
0 При анализе результатов аттестации измерительного растра 1, диапазон измерения перемещения делится на определенное количество интервалов коррекции ( Д на фиг.2б) и на каждом интервале определяет5 ся число корректирующих импульсов и знак коррекции. Для каждого интервала коррекции эта информация кодируется и вводится в запоминающий элемент программируемой схемы 7 и считывается каждый раз, ког0 да двоичный счетчик б фиксирует величину перемещения, попадающую в пределы определенного интервала коррекции.
Как показано на фиг.2, при аттестации измерительного растра в i-ом интервале
5 коррекции Д зафиксирована погрешность mi равна 1. Тогда при перемещении измерительного растра на величину А,в пределах интервала коррекции на вход коррекции коммутатора поступит 1 корректирующий .
0 импульс (см.фиг.2, Вх (К). Благодаря формированию корректирующих , сигналов в программирующей схеме от кода 1, 0 на выходах реверсивного счетчика, корректирующие импульсы распределяются
5 равномерно в интервале коррекции, тем обеспечивая оптимальный режим коррекции. Таким образом, обеспечивается компенсация систематической погрешности до -0,5 дискреты квантирования перемещения.
0 При сопоставлении признаков прототипа и предлагаемого устройства, видно, что положительный эффект достигается за счет наличия корректирующей обратной цепи, содержащей коммутатор 4, формирователь
5 импульсов 8 и программирующую схему 7. Наличие этой цепи повышает точность преобразования перемещения путем компенсации систематической составляющей погрешности измерительного растра,
Известный аналоговый сигнал или цифровой код и корректирующие цепи не способны обеспечить в предлагаемом устройстве полученный положительный эффект.
Формула изобретения Измерительный преобразователь перемещений, содержащий реверсивный счетчик, измерительную и индикаторную шкалы, интерполятор, двумя входами подключенный к индикаторной части и содержащий выход импульсов суммирования и выход импульсов вычитания, коюрыо соответственно подключены к входу суммирования и входу вычитания реверсивного счетчика с индикатором перемещения, отличающийся тем, что, с целью повышения точности преобразования путем коррекции погрешности шага измерительного растра,
yf
он снабжен формирователем корректирующих импульсов, программируемой схемой коррекции, коммутатором, включенным между интерполятором и реверсивным
счетчиком и выполненным четырехвходо- вым, один из двух дополнительных входов подключен к выходу сигнала знака коррекции программируемой схемы коррекции, другой подключен через формирователь
корректирующих импульсов к выходу сигнала величины коррекции программируемой схемы коррекции, содержащей управляемый делитель частоты выходных сигналов реверсивного счетчика и запоминающий
элемент для хранения результатов аттестации измерительной части, а входы программируемой схемы подключены к группе выходов реверсивного счетчика параллельно индикатору перемещения.
5
Фиг.1
- 1гтгггчглгопг1гл
njninr nnririrnjnr
1779921
Фие.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для функционального контроля цифровых объектов | 1980 |
|
SU792255A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Фотоэлектрические преобразователи информации | |||
| Под ред | |||
| Преснухина Л.Н. | |||
| М,: | |||
| Машиностроение, 1974, с.180. | |||
