Изобретение относится к автоматике и вычислительной технике и может быть использовано в устройствах для :программного управления металлорежущими станками. Известно устройство для программного управления, содержащее последовательно соединенные генератор импульсов, счетчик импульсов, блок управления, первый элемент И, блок ввода программы, блок буферной папяти, блок рабочей памяти и интерполятор, последовательно соединенные блок коррекции, блок перезаписи информации и первый логический блок, is выходы которого соединены с вторыми входами блока рабочей памяти, последовательно соединенные блок анализа координат, блок триггеров коррекции и второй элемент И, выходом подключенный к второму входу блока перезаписи информации, а также третий элемент И, первым входом соединенный с вторым входом блока триггеров коррекции, вторым входом - с вторым выходом блока управления, а выходом с вторым входбмблока буферной памяти, четвертый и пятый элементы И, блок шестых элементов И и второй логический блок, который первым входом через четвертый элемент И сое динен с вторыми входами блока анализа координат, первыми входами блока шестых элементов И и выходами блока буферной памяти, второй вход четвертого элемента И соединен с вторым входом блока управления, третий выход которого соединен с вторыми входами блока рабочей памяти, четвертый выход - с первым входом пятог элемента И, вторым входом соединенного с вторьпу входом второго логического блока, третьи входы которого подключены к выходам блока рабочей памяти, а выходы - к второму входу интерполятора, выходы блока шестых элементов И соединены с четвертыми входами блока рабочей памяти Щ. Недостатками описанного устройств являются невысокая надежность вследствие большой конструктивной сложности, а также невысокая точность из-з отсутствия возможности коррекции люфтов приводов подач станка в начале автоматической работы вследстви отсутствия информации о знаках перем щения приводов подач в наладочном режиме работы. 1 Наиболее близким к предлагаемому является .устройство для числового программного управления, содержащее генератор импульсов, блок задания скорости, элемент И, коммутатор, последовательно соединенные блок ввода программы, дискретный интерполятор, регистр, вентиль, выходами подключенный к входам коммутатора, а вторым входом - к второму выкрду дискретного интерполятора, второй вход которого соединен с выходом элемента И, а третий выход - с входом блока ввода программы, подключенный вторым выходом к первому входу блока задания скорости, второй вход которого соединен с выходом генератора импульсов, а выход - с вторым входом регистра, вторым и третьим выходами подключенного к входам элемента И. Устройство работает следующим образом. Программа обработки, записанная на перфоленту и состоящая из отдельных кадров, считывается блоком ввода программы, с которого в двоичном коде поступает на интерполятор и содержит числовую информацию о величинах перемещения, знаки приращений, координаты перемещения и вид интерполяции (линейная, круговая), а также - на блок задания скорости, определяя частоту следования его выходных импульсов, соответствующих заданной скорости подачи приводов. В режиме интерполяции сигналы на отработку перемещений (переносы) с дискретного интерполятора поступают на вход регистра, где накапливаются шаги, считываемые импульсами блока задания скорости. Импульсы с выхода регистра подаются на вход вентиля, где в зависимости от знаков приращения, поступающих в течение времени реализации алгоритма интерполяции отрабатываемого кадра с триггера знаков (Тл+ ) интерполятора, распределяются по выходам + или - и подаются на соответствующие входы соммутатора. Коммутатор распределяет импульсы по фазам шагового двигателя. а привод подач при этом производит перемещения по координате согласно знаку приращения и числовой информации, поступающей с интерполятора. Выходная частота интерполятора значительно больше программируемой. Перевод работы интерполятора в истинный масштаб времени осуществляется с
31
помощью элемента И, на котором вырабатывается сигнал, блокирующш интерполятор при накоплении двухразрядным регистром двух единиц. Интерполятор ждет импульс с выхода блока задания скорости, считывающего один импульс из регистра. Таким образом, скорость перемещения приводов подач определяется частотой следования импульсов с выхода блока 3 задания скорости.
По окончании отработки кадра интерполятором формируется в блок ввода программы сигнал Конец отработки кадра, по которому блоком ввода программы производится считывание последующего кадра.
До начала интерполирования последующего кадра после вьщачи в блок ввода программы сигнала Конец отработки кадра знак последующего перемещения записывается в триггере знаков интерполятора, где хранится в течение реализации алгоритма интерполяции 2 .
Недостатком известного устройства является его низкая точность из-за погрешности, возникающей в результате люфтов приводов подач при смене направления перемещения.
Цель изобретения - повьппение точности путем коррекции погрещностей приводов подач.
. Поставленная цель достигается тем, что в устройство для числового программного управления, содержащее генератор импульсов, блок задания скорости, первый элемент И, двухразрядный регистр и последовательно соединенные блок ввода программы, дискретный интерполятор, первый блок элементов И и коммутатор, первые выходы двухразрядного регистра подключены к входам первого элемент И, выход которого соединен с вторым входом дискретного интерполятора, второй выход которого подключен к первому входу двухразрядного регистра, третий выход - к первому входу блока ввода программы, второй выход которого соединен с первым входом блока задания скорости, с вторым входом которого соединен выход генератора импульсов, введены первый элемент ИЛИ, схема сложения по модулю два,С -триггер, инвертор и последовательно соединенные второй регистр, второй блок элементов И,
4251
h-разрядный счетчик, второй элемент ИЛИ, второй элемент И и третий блок элементов И, второй вход которого соединен с выходом блока задания 5 скорости, первый выход - с вторым входом двухрйзрядного регистра, второй выход - с вторым входом и-разрядного счетчика импульсов и с первым входом первого элемента ИЛИ, соеди10 ненного выходом с вторым входом первого блока элементов И, а вторым входом - с вторым выходом двухразрядного регистра, выход второго элемента ИЛИ через инвертор подключен
5 к управляющему входу второго блока элементов И, а непосредственно к С-входу D-триггера,)-вход которого соединен с первым выходом дискретного интерполятора и с первым
0 входом схемы Сложения по модулю два, выход которой соединен с вторым входом второго элемента И, второй вхол; поключен к выходу D-триггера, R и .5- установочные входы которого явля5 ются входами устройства, выход генератора импульсов соединен с третьим входом второго блока элементов И, выход коммутатора является выходом устройства.
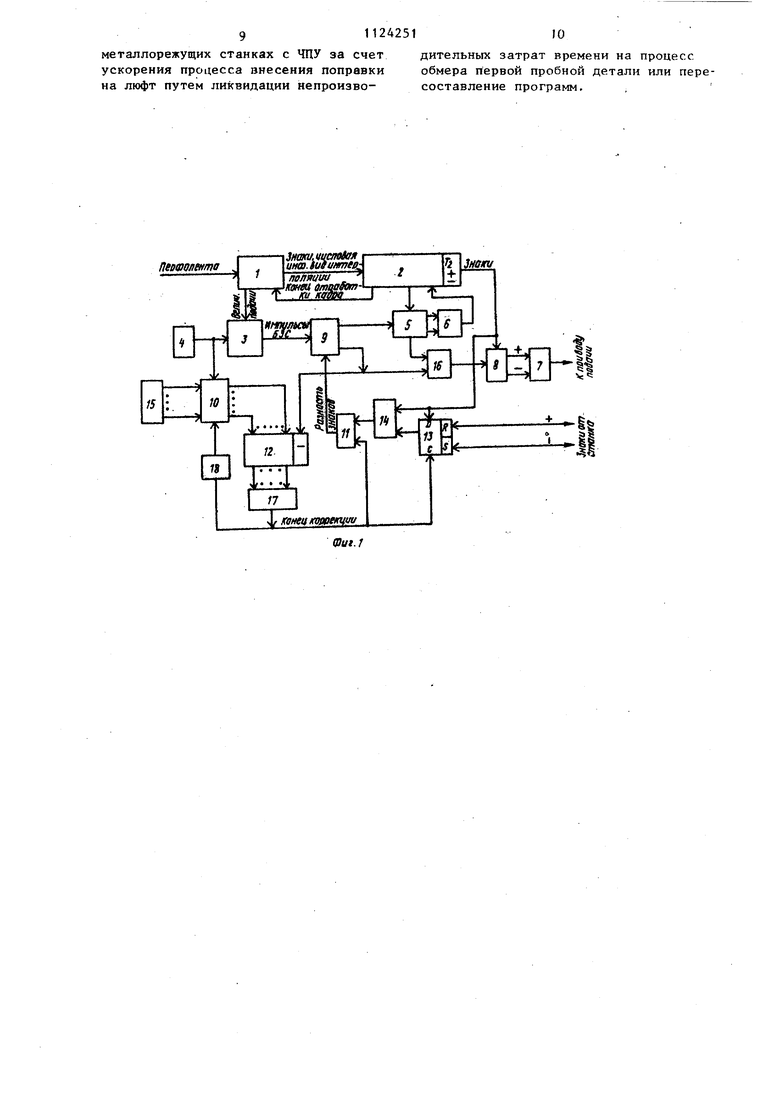
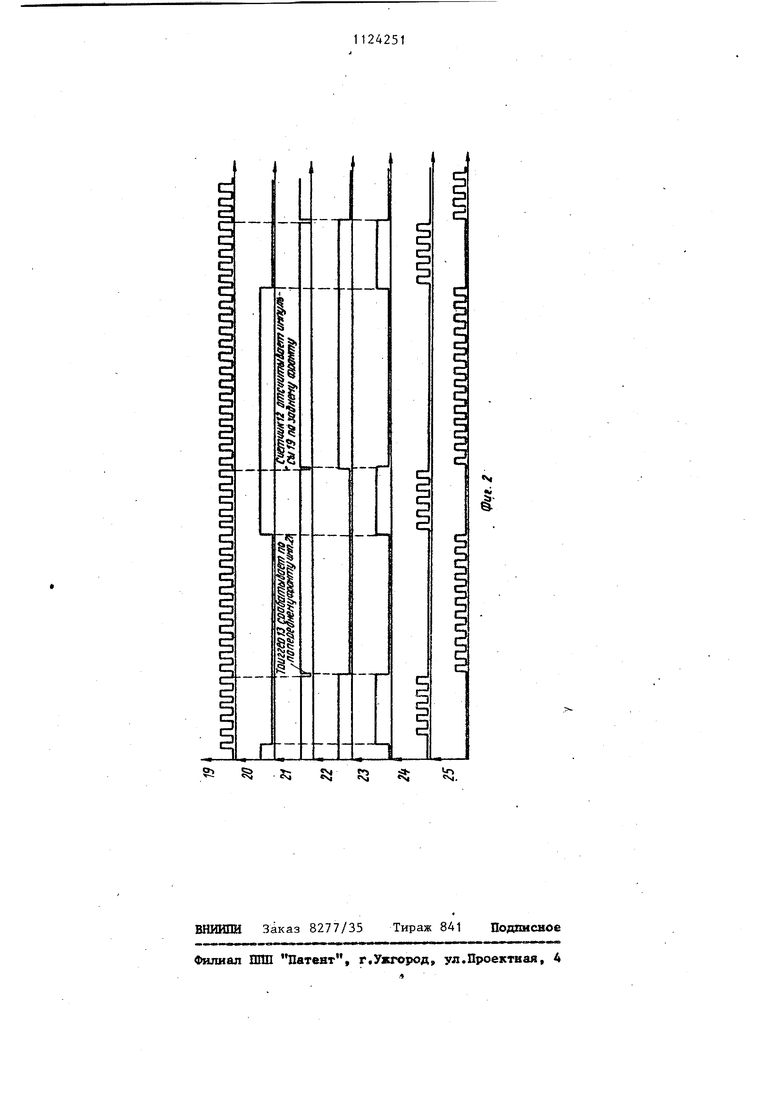
0 На фиг. 1 представлена функциональная схема устройства; на фиг. 2 временные диаграммы, поясняющие работу устройства.
Устройство содержит блок 1 ввода пpoгpa iмы, дискретный интерполятор 2, блок 3 задания скорости, генератор 4 импульсов, первый регистр 5, первый элемент И6, коммутатор 7, блок элементов И 8, 9, 10, второй элемент И 11, двоичный П-разрядный счетчик 12 импульсов,Р -триггер 13, схему 14 сложения по модулю два, второй ре- ; гистр 15, первый и второй элементы ИЛИ 16, 17 и инвертор 18.
t
На эпюрах фиг. 2 изображены сигналы: 19 - выходные импульсы блока 3 задания-скорости; 20 - сигнал на выходе триггера знаков дискретного интерполятора 2; 21 - сигнал Конец коррекции на выходе элемента ИЛИ 17;
22- сигнал на выходе)-триггера 13;
23- сигнал Разность знаков на выходе схемы 14 сложения по модулю два
24- корректирующие импульсы на втором выходе вентиля, поступаюп1ие на первый вход-элемента ИЛИ 16; 25 - импульсы истинных размерных перемещений
на выходе регистра 5, поступающие на второй вход элемента ИЛИ 16.
Счетчик 12 реализует операцию счета сигналов (импульсов), поступающих на его вход. По способу;кодирования счетчик относится к позиционному классу (двоичному) кодирования, по назначению - к вычитающему. Емкость счетчика п определяется максимальным числом сигналов, которое может быть зафиксировано на счетчике, и зависит от числа каскадов (разрядов) счетчика.
На П разрядах счетчика возможна предварительная запись двоичного код числа. Например, можно реализовать счетчик 12 на.nD -триггерах. Инверс ный выход 3)-триггеров соединяется со своим)-входом, образуя таким образо И счетных триггеров, а прямой выход предыдущего триггера подключается к синхронизирующему С-входу последующего. R -входыD-триггеров используются для предварительной записи двоичного кода числа. Прямые выходы D-триггеров являются выходами счет-, чика 12. Устройство работает следующим образом. После включения устройство устанавливается в исходное состояние, причем разряды счетчика 12 импульсов устанавливаются в нулевые состояния, по которым с выхода П-входного элемента ИЛИ 17 формируется сигнал Конец коррекции, уровень которого соответствует уровню логического О и который пройдя через инвертор 18, разрешает на время одного такта импульсов генератора 4 проход двоичного кода с И-разрядного регистра 1i через вентиль 10 на входы вычитающего двоичного счетчика 12 импульсов. В регистре 15 хранится корректи рующий код, значение которого прямо пропорционально величине люфта привода подач. Корректирующий двоичный код записывается на разряды счетчика 12 импульсов. В случае нулевого кода на регистре 15 на выходе элемента ИЛИ 17 постоянно присутствует сигнал Конец коррекции, по которому с частотой импульсов генератора 4 производится перезапись нулевого код в счетчик 12 импульсов и блокировка прохождения сигнала ,РазностЬ( знаков с выхода схемы П сложения по модулю два через элемент И 11 на
вход вентиля 9. В случае записи кода, отличного от нуля, в счетчик12 импульсов с выхода элемента ИЛИ 17 сигнал Конец коррекции снимается и в этот момент (по переднему фронту снятия сигнала Конец коррекции) на триггер 13 поD -входу записывается знак приращения с триггера знаков (Т) интерполятора 2 (фиг. 2, эпюры 20, 2, 22).
Автоматическому режиму работы устройства предшествует наладочный режим, по которому производятся перемещения приводов подач от станка с целью выхода на исходную точку начала отработки программы обработки со знаками + или - , которые записываются на триггер 13 по входам R и 5 соответственно. В автоматическом режиме работы предлагаемого устройства считывание программы блоком 1 ввода программы и запись информации в интерполятор 2, блок 3 задания скорости производятся аналогично работе известного устройства Y|. В случае ра-зности знаков преды- .; дущего и последующего перемещений, хранящихся в триггере 13 и триггере знаков () интерполятора 2 соответственно, на выходе, схемы 14 сложения по моду1по два формируется сигнал Разность знаков, который, пройдя через элемент И 11 при условии отсутствия сигнала Конец коррекции (т.е. записи ненулевогб кода на счетчик 12 импульсов) с выхода элемента ИЛИ 17, переключает импульсы блока 3 задания скорости с входа вентиля 9 на его второй выход, откуда импульсы поступают на первый вход элемента ИЛИ 16 и на вь1читающий вход счетчика 12 импульсов (фиг. 2, эпюры 20-24). В то же время импульсы блока 3 задания скорости с первого выхода вентиля 9 не подаются на вход регистра 5, и при накоплении последним двух единиц (шагов интерполятора) элемент И 6 вырабатывает сигнал, блокирующий дискретный интерполятор 2. Начало реализации алгоритма интерполяции на время действия сигнала Разность знаков с выхода схемы 14 сложения по модулю два задерживается, следовательно, с выхода регистра 5 импульсы не поступают на второй вход элемента ИЛИ 16. Импульсами блока 3 задания скорости с второго выхода вентиля 9 считывается двоичны код корректирующего значения погрешности со счетчика 12 импульсов. Счет чик 12 импульсов досчитывает до нуле вого содержания в п разрядах, и элемент ИЛИ 17 формирует сигнал Конец коррекции, по которому переписывается корректирующий код с регистра 15 на разряды счетчика 12 импульсов через вентиль 10. С выхода элемента ИЛИ 17 при отсутствии нулевого кода в разрядах счетчика Т2 импульсов снимается сигнал Конец коррекции, в момент снятия которого с синхронизирующего входа триггера 13 noD-вхо ду записывается знак предстоящего размерного перемещения с триггера знаков (124) интерполятора 2 в триггере 13, в результате чего с выхода схемы 14 сложения по модулю два снимается сигнал Разнйсть знаков, отсутствие которого переключает импульсы блока 3 задания скорости с входа вентиля 9 на первьй его выход. Поступление импульсов с втор го выхода вентиля 9 на первый вход элемента ИЛИ 16 и на вычитающий вхо счетчика 12 импульсов прекращается (фиг. 2, эпюры 19-24). Количество импульсов, прошедших через элемент ИЛИ 16 с первого входа на выход, прямо пропорционально двоичному коду корректирующего значения погре ности, хранящемуся в регистре 15. С поступлением импульсов блока 3 задания скорости с первого выхода вентиля 9 на регистр 5 начинается реализация алгоритма интерполяции и осуществление перевода работы интерполятора 2 в истинный масштаб времени аналогично работе известного устройства 2j Импульсы свыхода регистра 5 подаются на второй вход элемента ИЛИ 16 (фиг. 2, эпюр 25). Корректирующие импульсы, поступающие на пер вый вход, и импульсы истинных размерных перемещений поступающие на второй вход элемента ИЛИ 1 6 (фиг.2, эпюры 24, 25) проходят на его выход и подаются на вход вентиля 8. Распределение импульсов на вентиле 8 и коммутаторе 7 производится аналогично работе прототипа. Следовательно, приводом подач производится отработка корректирующей величины люфта в случае смены энака направления перемещения и истинного размерного перемещения по координате в соответствии со знаком перемещения и числовой информацией, считываемыми блоком 1 ввода программы с перфоленты, и значением корректирующего кода, хранящегося в регистре 15. В случае совпадения знаков предыдущего и последующего перемещений на выходе схемы 14 сложения по модулю два сигнал Разность знаков не формируется, чем разрешается проход импульсов блока 3 задания скорости с входа вентиля 9 на его первый выход. Импульсы подаются на вход регистра 5 и считывают шаги интерполятора 2 с регистра 5 на второй вход элемента ИЛИ 16, в то время как на второй выход вентиля 9 не проходят импульсы блока 3 задания скорости, т.е. считывание корректирующего кода со счетчика 12 импульсов не производится, В качестве базового объекта иожет быть выбрана система числового i программного управления НЗЗ-1М. Корректирующие величины поправок на радиус и длину инструмента, начальное смещение и т.д. вводятся с помощью программы обработки, по которой производится опрос соответствзпощей корректирующей линейки, где записано значение корректирующего кода. Наряду с необходимостью коррекции длины и радиуса инструмента необходимо учитывать погрешность, вносимую люфтами кинематических систем станков, значительно влияющими на точность обработки деталей. В системе компенсировать погрешность на люфт возможно в процессе редактирования программ. А поскольку в процессе эксплуатации величина погрешности непостоянна , то возникает необходимость пересоставления программ с учетом нового значения погрешности. Предлагаемое устройство обеспечивает коррекцию погрешности на люфт. Значение погрешности предварительно замеряется и заносится в ц разряды второго регистра. Таким образом, применение предлагаемого устройство позволяет сущест венно снизить погрешность обработки, зависящую от люфтов приводов подач, повысить производительность труда на металлорежущих станках с ЧПУ за счет ускорения процесса внесения поправки на люфт путем ликвидации непроизводительных затрат времени на процесс обмера первой пробной детали или пересоставление программ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для числового программного управления приводом | 1984 |
|
SU1242916A1 |
| Устройство для числового программного управления приводом | 1986 |
|
SU1359771A1 |
| Устройство для числового программного управления | 1989 |
|
SU1737410A1 |
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для задания программы | 1979 |
|
SU862118A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Интерполятор для систем программного управления | 1977 |
|
SU658528A1 |
| Цифровой интерполятор | 1976 |
|
SU651317A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
УСТРОЙСТВО ДЛЯ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ, содержащее генератор импульсов, блок задания скорости, первый элемент И, двухразрядный регистр и последовательно соединенные блок ввода программы, ;: дискретный интерполятор, первый блок элементов И и коммутатор, первые выходы двухразрядного регистра подключены к входам первого элемента И, выход которого соединен с вторым входом дискретного интерполятора, второй выход которого подключен к первому входу двухразрядного регистра, третий выход - к первому входу блока ввода программы, второй выход которого Соединен с первым входом блока заДания скорости, с вторым входом которого соединен выход генератора импульсов, отличающеес ятем, что, с целью повышения точности работы устройства, в него введены первый элемент ИЛИ, схема сложения по модулю два,Р -триггер, инвертор и последовательно соединенные второй регистр, второй блок элементов И, П-разрядный счетчик, второй элемент ИЛИ, второй элемент И и третий блок элементов И, второй вход которого соединен с выходом блока задания скорости, первый выход - с вторым входом двухразрядного регистра, второй выход - с вторым входом h -разрядного счетчика импульсов и с первым входом i первого элемента иЛИ, соединенного выходом с вторым входом первого (Л блока элементов И, а вторым входом с вторым выходом двухразрядного регистра, выход второго элемента ИЛИ через инвертор подключен к управляющему входу второго блока элементов И, а непосредственно - к С-входу, 1)-триггера,Б-вход которого соединен с первым выходом дискретного интерполятора и с первым входом сложения по модулю два, выход которой соединен с вторым входом второго элемента И, второй вход подключен к выходу) -триггера, R и 5 - установочные входы Которого являются входами устройства, выход генератора импульсов Соединен с третьим входом второго блока элементов И, вькод коммутатора является выходом устройства.
Пеофопента
Т
ф канетпореянт
i
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ числового ПРОГРАММНОГОТ1:Х11/^1С.^;;-д^Е Ш5'БЛК-«Г^-д | 1979 |
|
SU826279A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
