Изобретение относится к гилро/кжации и может быть испо/ ьзовано в системах подводной навигаи.мм для точного измерения углоа на гидроакустические маяки или другие источники сигналов в секторе углов 0-360°.
Известны пелб;нгаторы, обйспечипающие круговой обзор гфостранства, выполненныесиспользованиеммногоэлеме ггиых цилиндрических антенн, в которых поворот акустического луча обеспечивается электронным управлением положения характеристики )- Зпрапленности с помощью коммутаторов; (Самойлов Л,К. Электронное управление хэра;-;теристиками направленности аитеш. Л,; Судостроение, 1987, 0.45),
- едост8тком тзких пеленгаторов является необходимость большого элементов и антенн, слож.чых и громоздких коммутаторов и схем управления.
Известны и другие пеленгаторы, обеспечивающие широкий сектор обзора пространства и использующие крестообразную антенную решетку из.трех элементоп, размещенных, например, о углах прямоугольного треугольника.
Однако точность таких пеленгаторов невысока из-за малой величины акустической базы, состоящей из двух расположенных на одной линии прием :иков, которая не превышает А/2, где Д. -,длина гюлны,
Наиболее близким к предлагаемому изобретению техническим решекглем пеленгатора яоллется акустическая пеленгационная система, содержаидая антенную решетку по меньшей мере из пяти акустических преобразователей, разделенных на две группы, Каждая из групп содержит не менее трех преобразователей (один из них может быть общим для двух групп). Преобразователи, Бхо,цящие в различные группы, расположены вдоль взаимно перле1,цикулярных осей. Выходные сигналы всех преобразователей подаются на устройство, которое измеряет временной интервал между моментами прохохдения через ноль сигналов, принятых двумп преобразователяг--чи каж,цой пары в двух группах. Из основании результатов измерений определяете; тот квадрант для плоскости разм8и.18ния решет1СИ преобразователей, в котором находится источник сигналов.
Недостатком такого п,5ленгатора является низкая точность пеленгования(с точностью до квадранта) источникоа сигналов в секторе углов 0-360°С,
Целью изобретения является устранение указанного недостатка, а именно повышение точности пеленгования сигналов во всем диапазоне измеряемых углов.
Указанная цель достигается тем, что D известное устройство, содержащее антенную решетку из двух групп преобразователей, каждая из которых содержит не менее трех преобразователей, расположенных вдоль двух взаимно перпендикулярных осей, введены даа-измерителп синуса угла
0 прихода сигналов на линейной антенной решетке, генератор квадратурных сигналов, два амплитудных модулятора, схема разности, два усилителя-ограничителя, две схемы выделения фронта, измеритель временных
5 интервалое, генератор тактовых импульсов и преобразователь кода, причем выходы первой группы преобразователей, расположенных вдоль одной оси, подключе1Ш к входам первого измерителя синуса угла
0 прихода сигнала, выходы второй группы
преобразователей, расположенных одоль
второй взаимно перпендикулярной оси,
подключены к входам второго измесрителя синуса угла прихода сигнала, выходы обоих измерителей соединены с первыми входами амплитудных модуляторов, вторые входы которых соединены соответственно с выходами генератора квадратурных сигналов, выходы
0 амплитудных модуляторов подключены к входам схемы разности, выход которой через первый усилитель-ограничитель и первую схему выделения франта подключен к первому входу измерителя временных ин5 терзалов, один из выходов генератора квадратурных сигналов также через второй усилитель-ограничитель и вторую схему выделения фронта соединен с вторым входом измерителя временных интервалов, третий
0 вход которого подключен к выходу генератора тактовых импульсоп, а выход измерителя вре.менных интервалонз подключен к входу преобразователя кода, выход которого является выходом устройства,
5 По сравнению с прототипом изобретение имеет новую совокупность существенных признаков, т.е. отвечает критерию новизна.
Предлагаемый пеленгатор отличается
0 тем, что благодаря введенным блокам и связям обеспечивает точное пеленгование источника сигналов в круговом секторе углов, при этом, с одной стороны, используется вся апертура каждой из линейных антенных
5 решеток, что позволяет пеленговать источник сигнала с высокой точностью, а с другой стороны, благодаря озаешенным оценкам угла прихода сигнала на каждой из линейных антенн формируется суммарная оценка угла, погрешность которой не зависит от
абсолютного значения угла. При этом пеленгование источника сигнала производится фаэооым методом, однако использование совместно информации с двух измерителей угла позволяет сформировать суммарную оценку угла, инвариантную к частоте принимаемого сигнала,при условии нахождения частоты сигнала в заданном наперед диапазоне частот. Данное обстоятельство чрезвычайно важно, т.к. позволяет говорить о высокой точности пеленгатора без какой-либо дополнительной коррекции при работе по любому источнику сигнала, частота которого лежит в заданном диапазоне. При зтом движение источника сигнала относительно приемной антенны не оказывает влияния на точность измерения угла.
Таким образом совокупность введенных блоков и связей обеспечивает повышение точности пеленгования в круговом секторе и позволяет утверждать, что предлагаемое изобретение соответствует критерию существенные отличия.
Повышение точности пеленгования в круговом секторе углов обеспечивает повышение качества пеленгатора и уменьшение времени поиска источников сигналов и ориентации по ним подводного аппарата или другого подводно-технического средства. Позтому предлагаемое изобретение соответствует критерию положительный эффект.
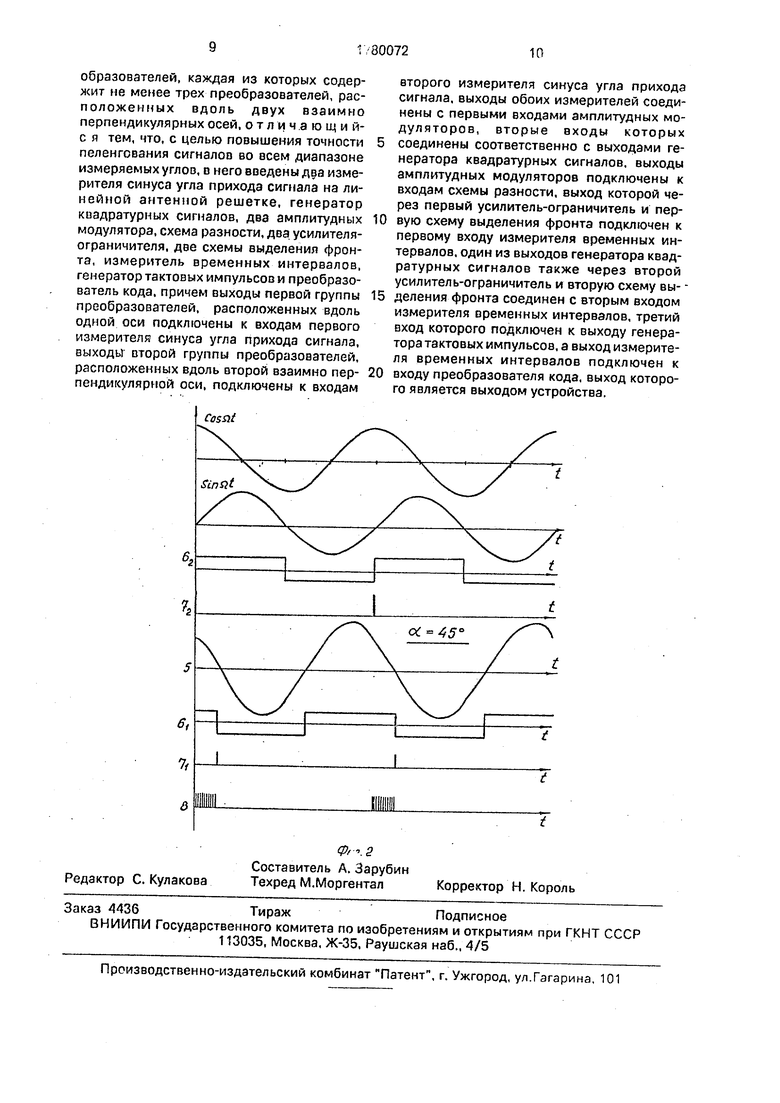
На фиг. 1 представлена структурная схема устройства: на фиг.2 - эпюры напряжений в различных точках структурной схемы, поясняющие ее работу.
Гидроакустический пеленгатор (фиг.1) содержит антенную решетку иа двух групп преобразователей 1, расположенных вдоль двух взаимно перпендикулярных осей, при этом выходы первой группы преобразователей, расположенных вдоль одной оси, подключены к входам первого измерителя 2 синуса угла прихода сигнала, выходы второй группы преобразователей 1, расположенных вдоль второй взаимно перпендикулярной оси, подключены к входам второго измерителя 2 синуса угла прихода сигнала, выходы обоих измерителей 2 соединены с первыми входами амплитудных модуляторов 3, вторые входы которых соединены соответственно с выходами генератора Л квадратурных сигналов, выходы амплитудных модуляторов 3 подключены к входам схемы 5 разности, выход которой через первый усилитель-ограничитель 6 и первую схему 7 выделения фронта подключен к первому входу измерителя 8 временных интервалов, один из выходов
генератора 4 квадратурных сигналов также через второй усилитель-ограничитель 6 и вторую схему 7 выделения фронта соединен с вторым входом измерителя 8 временных
интервалов, третий вход которого подключен к выходу генератора 9 тактовых импульсов, а выход измерителя 8 временных интервалов подключен к входу преобразователя 10 кода, выход которого является выходом пеленгатора.
Реализация отдельных узлов гидроакустического кругового пеленгатора может быть выполнена следующим образом.
Измеритель временных интервалов может содержать триггер, выделяющий временной интервал между импульсами, приходящими по первому и второму входам, и счетчик, подсчитывающий число импульсов тактового генератора, заполняющих
данный интервал времени.
Для формирования квадратурных сигналов в генераторе квадратурных сигналов достаточно использовать фазовращатель на jr/2 на рабочей частоте генератора.
Измеритель синуса угла прихода сигнала на двухэлементной фазовой антенне содержит фазовращатель нал/2,
усилители-ограничители, гетеродин и фазовый детектор. В таком измерителе производитсянахождениеоценок
пространственной корреляционной функции на элементах антенны, затем модуляция найденных оценок соответствующими напряжениями генератора опорных функций и логическое умножение. В момент прихода сигнала на приемную антенну гидролокатора формируется с периодичностью колебаний низшей опорной частоты генератора опорных колебаний отметка (импульс напряжения), положение которой на периоде колебания низшей опорной частоты однозначно характеризует синус угла прихода сигнала.
Гидроакустические сигналы с выходов
двух групп преобразователей 1, расположенных вдоль двух взаимно перпендикулярных осей, поступают на входы двух измерителей 2 синуса угла прихода сигнала, выходные сигналы которых подаются на
первые входы аналоговых модуляторов 3. На вторые входы аналоговых модуляторов 3 поступают выходные сигналы генератора 4 квадратурных сигналов, сдвинутые по фазе друг относительно друга на л:/2. Выходные
сигналы аналоговых модуляторов 3 вычитаются в схеме 5 разности, выходной сигнал которой через усилитель-ограничитель 6 и схему 7 выделения фронта поступает на первый вход измерителя 8 временных ийтервалов, на второй вход которого также через второй усилитель-ограничитель 6 и вторую схему 7 выделения фронта.поступает сигнал с выхода генератора квадратурных сигналов, который подавался на амплитудный модулятор 3. чье выходное напряжение поступало со знаком минус на вход схемы 5 разности. На третий вход измерителя 8 временных интервалов подаются импульсы заполнения с выхода генератора 9 тактовых импульсов, а на выходной сигнал измерителя 8 временных интервалов поступает на вход преобразователя 10 кода, где преобразуется в необходимую форму и подается на выход устройства. Таким образом на выходе схемы 5 разности формируется напряжение вида и (t) sinacosQt cosQ;sinQt sin(Q:-Qt) т.к. sln{a+20) , На фиг.2 приведены напряжения на входах генератора квадратурных сигналов 4, обозначенные как cos Qt и sin Q t, напряжения на выходах второго усилителя-ограничителя 6 и второй схемы 7 выделения фронта, напряжение на выходе схемы 5 разности, пропорциональное sin () в частном случае, когда угол а 45°. Кроме того, там же приведены соответствующие углу а 45° напряжения на выходах первого усилителя-ограничителя 6 и первой схемы 7 выделения фронта. Интервал времени между соответствующими импульсами, поступающими на вход измерителя 8 временных интервалов, заполняется тактовыми импульсами (фиг.2), затем производится их подсчет и преобразование в требуемый код. Необходимо отметить, что измерение синуса угла прихода сигнала на антенную решетку фазовым методом требует знания частоты принимаемого сигнала и расстояния между приемными элементами антенны. Если второе из конструкции антенной решетки всегда известно, то частота принимаемого сигнала а ряде случаев может быть неизвестна. При этом соотношение d/A, где d - расстояние между приемниками антенны; А - длина волны сигнала, входит в амплитуду напряжения на выходе измерителя синуса угла прихода сигнала. То есть, фактическая измеряется величина , где ; Ksincr -г-sina - пространственная частота сигнала. Поэтому обеспечение кругового однозначного сектора приема на фазовой антенне возможно только при ограничении диапазона возмохсных частот принимаемых сигналов, которое определяется соотношением d/A :S 0,5, для верхней частоты требуемого диапазона частот. При этом для d 0,5А параметр х меняется от - я до 7Г при изменении угла а на линейной антенне от (-90)° до (+90)°. И таким образом для любого угла прихода сигнала сохраняется однозначность измерения. В сторону понижения рабочей частоты сигнала жестких ограничений нет. однако, чем ниже частота принимаемого сигнала, тем меньше будет амплитуда выходного сигнала измерителя синуса угла прихода (т.е. меньше yfd) при фиксированном d. При этом непосредственно момент перехода напряжения на выходе схемы 5 разности через нулевой уровень от уровня амплитуды sin а и cos а зависеть не будет, что позволяет точно измерять угол без знания частоты входного сигнала. Отсчет угла а в круговом пеленгаторе производится от акустической оси одной линейной антенны и диапазон однозначного измерения угла а составит 0-360°. Потенциальная точность оценки пеленга на источник узкополосного сигнала с длиной волны А может быть определена по формуле q VTAfn где D - максимальная линейная акустическая база пеленгатора; q - отношение сигнал/помеха на входе; Т - длительность импульсного сигнала; Afn - полоса частот помех, и практически не зависит от угла прихода сигнала. Так, для D 2А , Т 10 мс, Afn 5,0 кГц Hq 1,0, . Измерение угла прихода сигналов осуществляется многократно за время длительности сигнала Т, т.к. частота Q генератора квадратурных сигналов выбирается такой, что . Применение предлагаемого изобретения с повышенной точностью пеленгования в круговом секторе обзора дает возможность повысить эффективность действия гидроакустических -навигационных систем при сокращении времени обзора пространства. Инвариантность к частоте принимаемого сигнала обеспечивает совместимость пеленгатора с любыми маяками-ответчиками. Формула изобретения Гидроакустический пеленгатор, содержащий антенную решетку из двух групп пре
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2341811C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505832C2 |
| ВСЕНАПРАВЛЕННЫЙ РАДИОПЕЛЕНГАТОР | 2001 |
|
RU2208808C2 |
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| ВСЕНАПРАВЛЕННЫЙ РАДИОПЕЛЕНГАТОР | 1996 |
|
RU2126978C1 |
Изобретение относится к гидролокации и может быть использовано в навигационных системах для точного определения пеленга на источник импульсных сигналов в диапазоне углов 0-360°. Цель изобретения - повышение точности пеленгования сигналов во всем диапазоне измеряемых углов. Гидроакустический круговой пеленгатор содержит антенную решетку из двух групп преобразователей 1, расположенных вдоль взаимно перпендикулярных осей, первый и второй измерители 2 синуса угла прихода сигналов, первый и второй амплитудные модуляторы 3, генератор 4 квадратурных сигналов, схему В разности, первый и второй усилители-ограничители 6, первую и вторую схемы 7 выделения фронта, измеритель 8 временных интервалов, генератор 9 тактовых импульсов, преобразователь 10 кода. 2 ил.^^•ч! 00 О ОVIк>&
| Реагент для флотационного обогащения углей | 1958 |
|
SU116777A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
