Изобретение относится к транспортному машиностроению, в частности к системам управления транспортных средств, оборудованных роторно-винтовыми или гусеничными движителями.
Цель изобретения - повышение удобства управления.
На фиг.1 - кинематическая схема системы управления; на фиг.2 - конструктивное выполнение рычага управления с приводом осевого управления и зубчатым механизмом; на фиг.З - то же, вид в плане; на фиг.4 - зубчато-реечный механизм, вид сзади; на фиг.5 - профиль кулачка управления пнев- моцилиндром привода сцепления; на фиг.6 - положение элементов системы управления при максимальном повороте рычага управления вперед.
Двигатель 1 посредством сцепления 2 постоянно-разомкнутого шипа, коробки 3 передач передает крутящий момент на движитель 4, на валу которого смонтирован тормоз 5. Двигатель 6 посредством сцепления 7, коробки передач 8, передает крутящий момент на движитель 9, оборудованный тормозом 10.
Система управления транспортного средства включает приводимый от двигателя 1 воздушный компрессор 11, соединенный магистралью 12 с двойным защитным клапаном 13, который магистралями 14 и 15 связан с ресивером 16, выполненным двухсекционным, причем магистраль 14 соединена с секцией А, а магистраль 15 - с секцией Б.
Тормоз 5 снабжен рабочим пневмоци- линдром 17, управляемым двухпозицион- ным тормозным краном 18, со следящим действием. Внутренние полости тормозного крана 18 соединены между собой магистралью 19, с секцией А ресивера 16 - магистралью 20, а с пневмоцилиндром 17 - магистралью 21 Аналогично тормоз 20 снабжен пневмоцилиндром 22, управляемым тормозным краном 23, внутренние полости которого связаны между собой магистралью 24, с секцией А ресивера 16 - магистралью 25, а с пневмоцилиндром 22 - магистралью 26. Толкатели тормозных кранов 18 и 23 оборудованы роликами
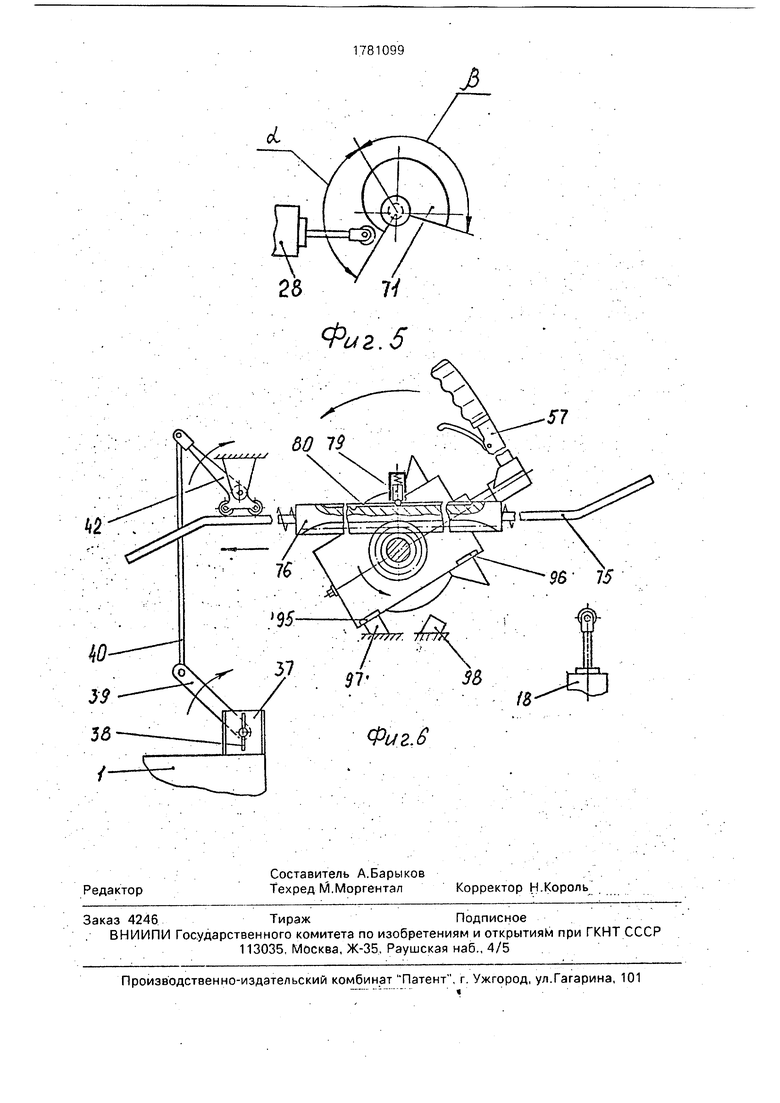
Пневмоцилиндр 27 привода сцепления 2 связан с двухпозиционным пневматическим краном 28 со следящим действием. Внутренние полости крана 28 соединены между собой магистралью 29, с секцией Б ресивера 16 - магистралью 30, а с пневмоцилиндром 27 - магистралью 31
Пневмоцилиндр 32 привода сцепления 7 связан двухпозиционным пневматическим краном 33 со следящим действием
Внутренние полости крана 33 соединены между собой магистралью 34, с полостью Б ресивера 16 - магистралью 35, а с пневмоцилиндром 32 - магистралью 36. Толкатели
пневматических кранов 28 и 33 оборудованы роликами.
Двигатель 1 снабжен карбюратором 37, дроссельная заслонка 38 которого неподвижно закреплена на оси поворотного рыча0 га 39. Противоположный конец рычага 39 посредством тяги 40, снабженной возвратной пружиной 41, шарнирно связан с концом поворотного кронштейна 42, на свободном конце которого установлены ро5 лики. В исходном положении ролики расположены на различной высоте относительно горизонтальной поверхности.
Двигатель 6 оснащен карбюратором 43, дроссельная заслонка 44 которого закреп0 лена на рычаге 45, соединенным посредством тяги 46, снабженной пружиной 47, с концом поворотного кронштейна 48, обору- дованного роликами, находящимися в исходном положении кронштейна 48 на
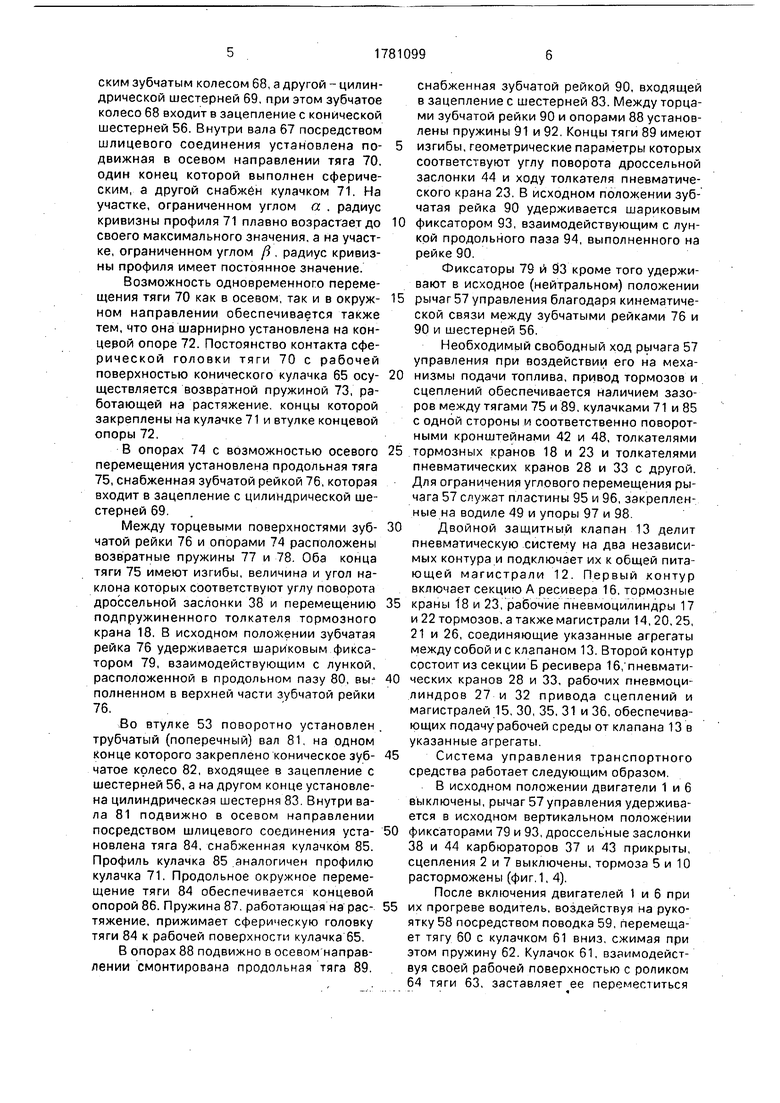
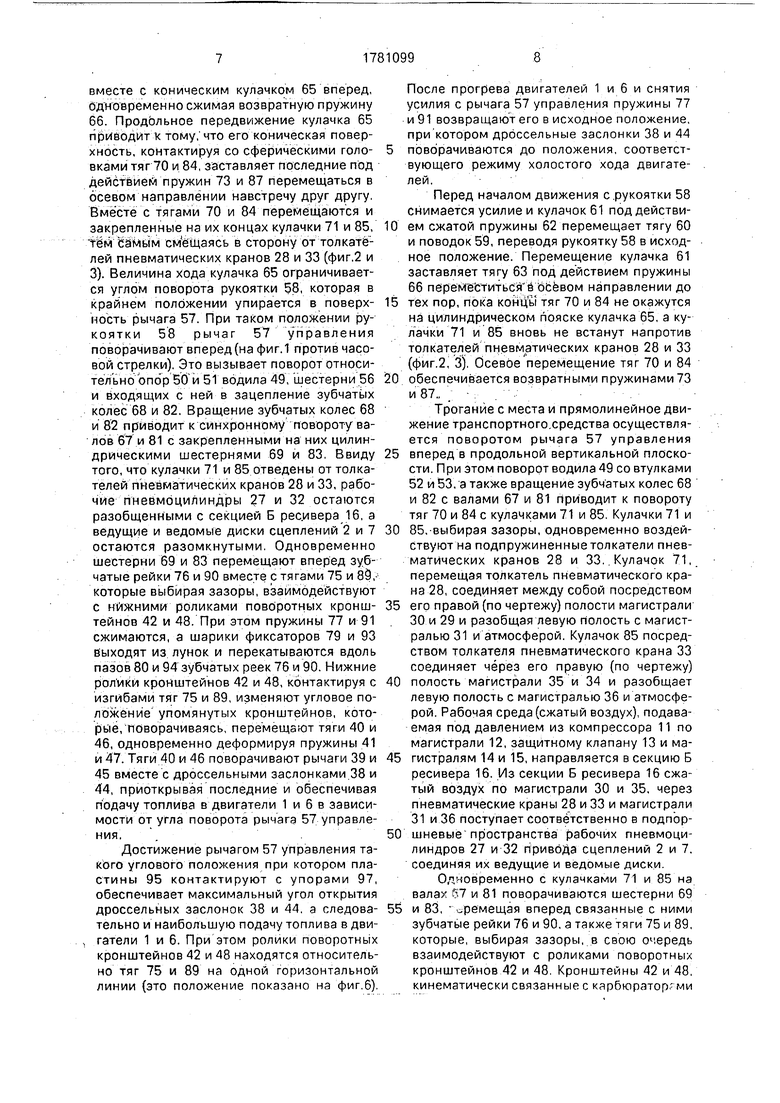
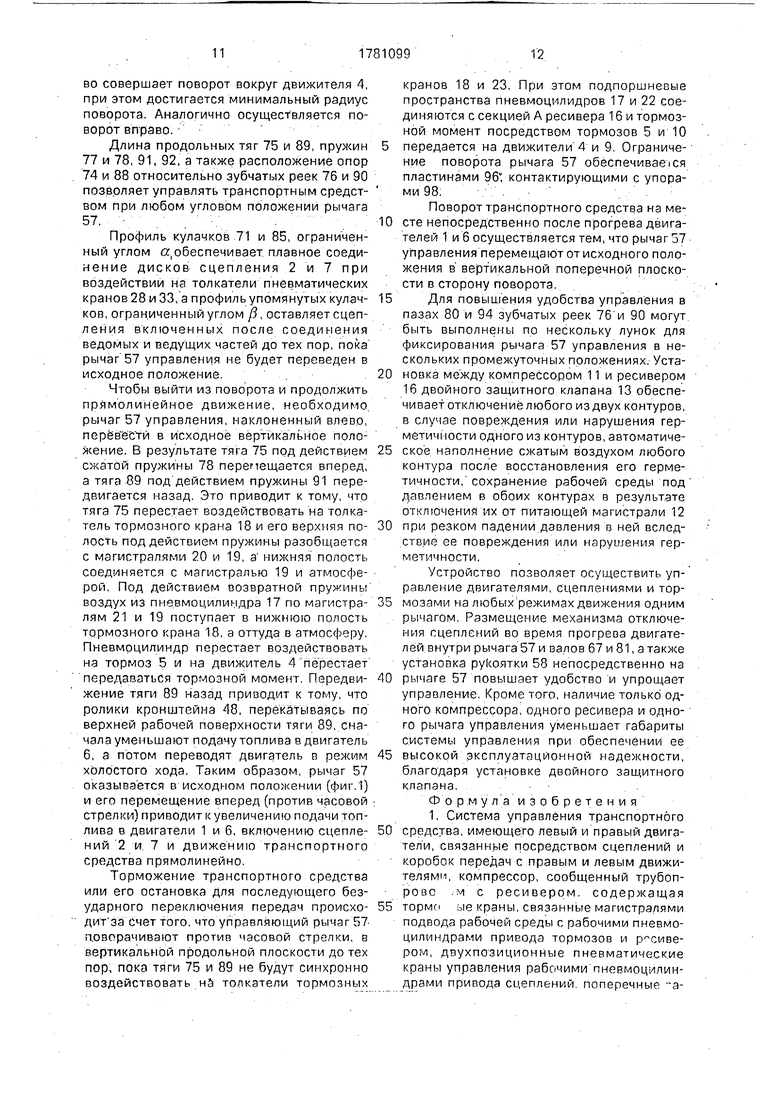
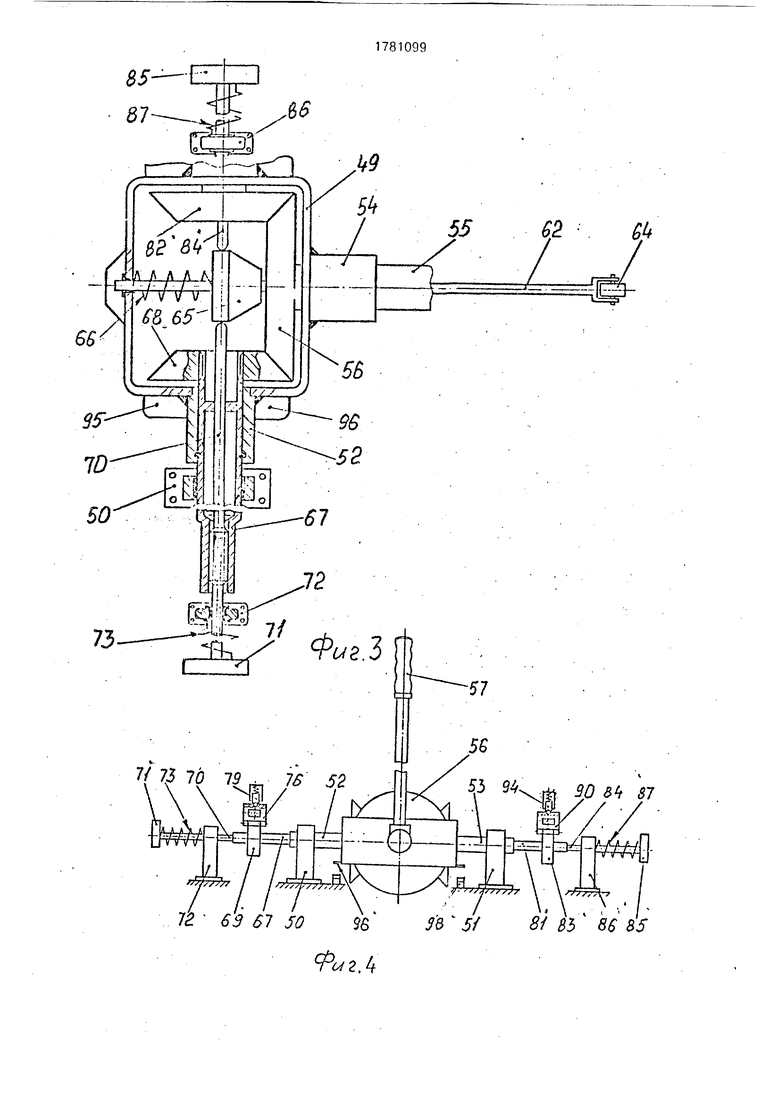
5 различной высоте относительно горизонтальной поверхности. Для управления карбюраторами 37 и 43, тормозными кранами - 18 и 23, пневматическими кранами 28 и 33 система управления транспортного средст0 ва оборудована дифференциальным зубчато-реечным механизмом Зубчато-реечный механизм выполнен в виде рамки (водила) 49, установленной поворотно на опорах 50 и 51 посредством втулок 52 и 53. неподвиж5 но установленных на рамке 49 Наводиле49 также закреплена втулка 54, в которой с возможностью вращения размещен центральный вал 55, один конец которого (нахо- дящийся внутри рамки 49) снабжен
0 конической шестерней 56, а другой конец - рычагом 57 управления. Внутри центрального вала 55 и рычага 57 расположено устройство продольного перемещения, содержащего установленную подвижно в
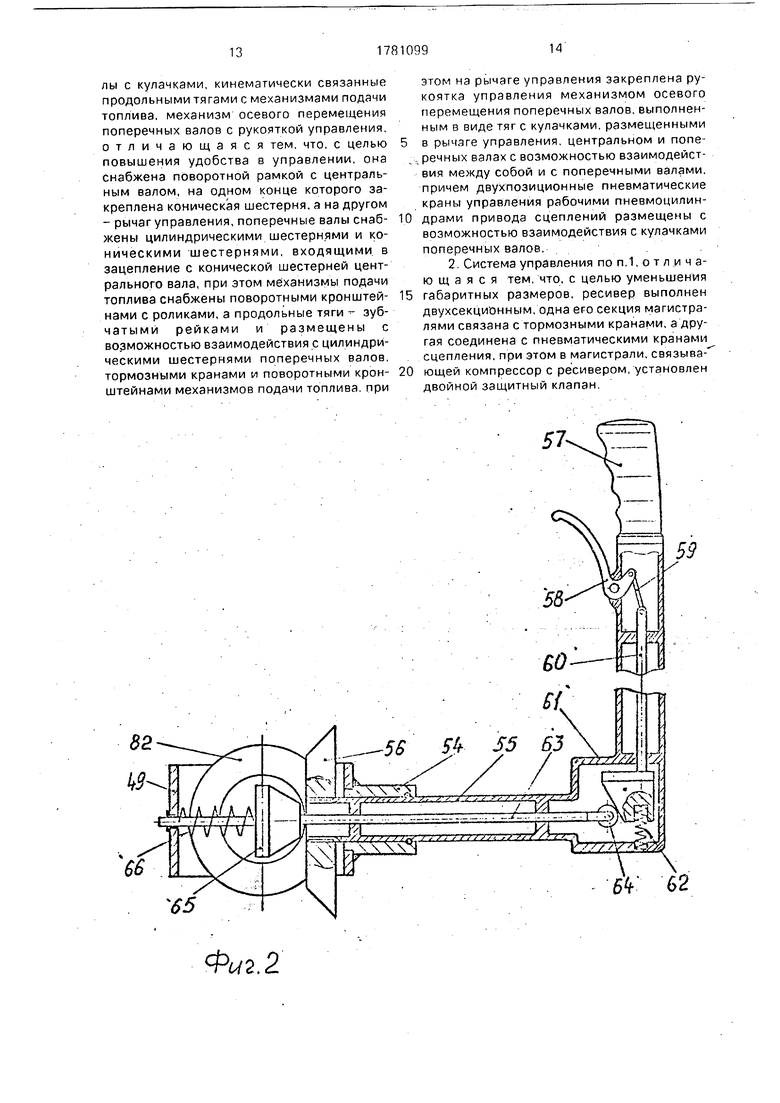
5 верхней части рычага 57 рукоятку 58, связанную шарнирно посредством поводка 59 с тягой 60, к нижнему концу которой прикреплен плоский кулачок 61. В исходном положении рукоятка 58 удерживается воз0 вратной пружиной 62, своими концами вхо- дящей в цилиндрические расточки, выполненные в кулачке 61 и рычаге 57. Внутри вала 55 проходит тяга 63,оборудованная ролш in 64, коническим кулачком 65 и пру5 жино 36. Для предотвращения поворота вокруг оси тяги 60 и 63 изготовлены квадратными в сечении.
Во втулке 52 с возможностью поворота смонтирован трубчатый (поперечный) вал 67 один конец которого снабжен конрческим зубчатым колесом 68, а другой - цилиндрической шестерней 69, при этом зубчатое колесо 68 входит в зацепление с конической шестерней 56. Внутри вала 67 посредством шлицевого соединения установлена подвижная в осевом направлении тяга 70, один конец которой выполнен сферическим, а другой снабжен кулачком 71. На участке, ограниченном углом а , радиус кривизны профиля 71 плавно возрастает до своего максимального значения, а на участке, ограниченном углом ft , радиус кривизны профиля имеет постоянное значение.
Возможность одновременного перемещения тяги 70 как в осевом, так и в окружном направлении обеспечивается также тем, что она шарнирно установлена на кон- церой опоре 72. Постоянство контакта сферической головки тяги 70 с рабочей поверхностью конического кулачка 65 осуществляется возвратной пружиной 73, работающей на растяжение концы которой закреплены на кулачке 71 и втулке концевой опоры 72.
В опорах 74 с возможностью осевого перемещения установлена продольная тяга 75, снабженная зубчатой рейкой 76, которая входит в зацепление с цилиндрической шестерней 69.
Между торцевыми поверхностями зубчатой рейки 76 и опорами 74 расположены возвратные пружины 77 и 78. Оба конца тяги 75 имеют изгибы, величина и угол наклона которых соответствуют углу поворота дроссельной заслонки 38 и перемещению подпружиненного толкателя тормозного крана 18. В исходном положении зубчатая рейка 76 удерживается шариковым фиксатором 79, взаимодействующим с лункой, расположенной в продольном пазу 80, выполненном в верхней части зубчатой рейки 76.
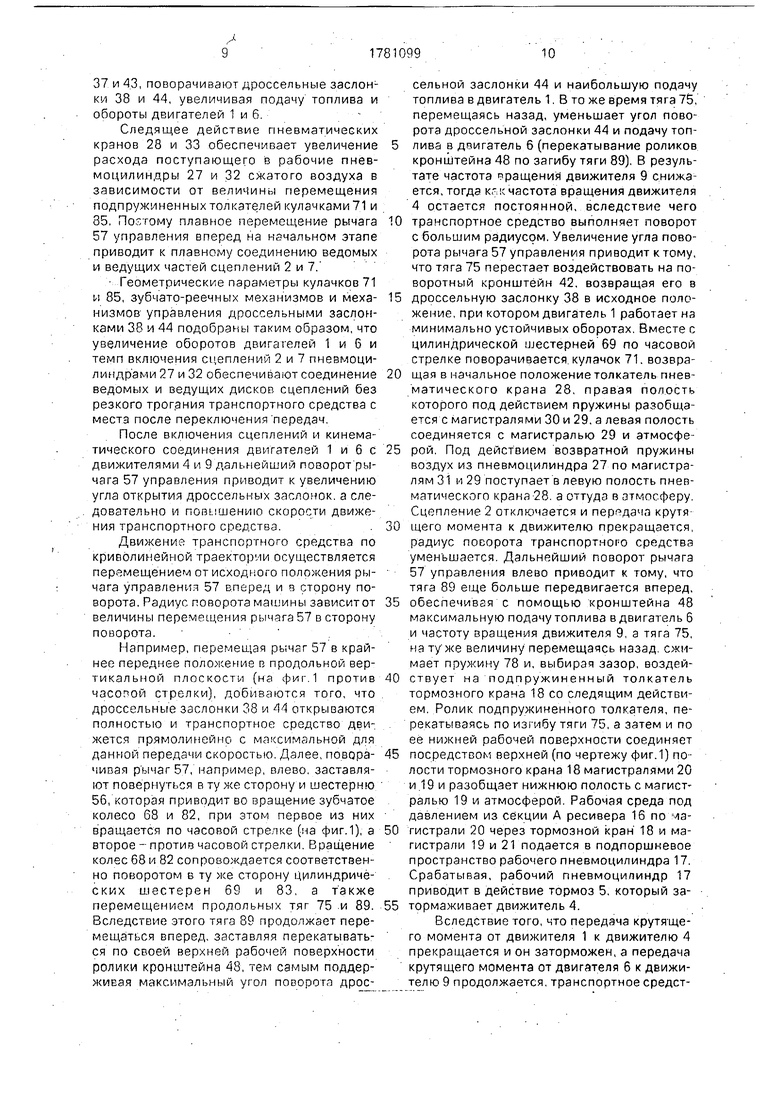
Во втулке 53 поворотно установлен, трубчатый (поперечный) вал 81 на одном конце которого закреплено коническое зубчатое колесо 82, входящее в зацепление с шестерней 56, а на другом конце установлена цилиндрическая шестерня 83 Внутри вала 81 подвижно в осевом направлении посредством шлицевого соединения установлена тяга 84, снабженная кулачком 85. Профиль кулачка 85 аналогичен профилю кулачка 71. Продольное окружное перемещение тяги 84 обеспечивается концевой опорой 86. Пружина 87. работающая на растяжение, прижимает сферическую головку тяги 84 к рабочей поверхности кулачка 65.
В опорах 88 подвижно в осевом направлении смонтирована продольная тяга 89.
снабженная зубчатой рейкой 90, входящей в зацепление с шестерней 83. Между торцами зубчатой рейки 90 и опорами 88 установлены пружины 91 и 92 Концы тяги 89 имеют 5 изгибы, геометрические параметры которых соответствуют углу поворота дроссельной заслонки 44 и ходу толкателя пневматического крана 23. В исходном положении зубчатая рейка 90 удерживается шариковым
0 фиксатором 93, взаимодействующим с лункой продольного паза 94, выполненного на рейке 90.
Фиксаторы 79 и 93 кроме того удерживают в исходное (нейтральном) положении
5 рычаг 57 управления благодаря кинематической связи между зубчатыми рейками 76 и 90 и шестерней 56.
Необходимый свободный ход рычага 57 управления при воздействии его на меха0 низмы подачи топлива, привод тормозов и сцеплений обеспечивается наличием зазоров между тягами 75 и 89, кулачками 71 и 85 с одной стороны и соответственно поворотными кронштейнами 42 и 48, толкателями
5 тормозных кранов 18 и 23 и толкателями пневматических кранов 28 и 33 с другой. Для ограничения углового перемещения рычага 57 служат пластины 95 и 96, закрепленные на водиле 49 и упоры 97 и 98
0 Двойной защитный клапан 13 делит пневматическую систему на два независимых контура и подключает их к общей питающей магистрали 12. Первый контур включает секцию А ресивера 16, тормозные
5 краны 18 и 23, рабочие пневмоцилиндры 17 и 22 тормозов, а также магистрали 14, 20,25, 21 и 26, соединяющие указанные агрегаты между собой и с клапаном 13. Второй контур состоит из секции Б ресивера 16, пневмати0 ческих кранов 28 и 33, рабочих пневмоци- линдров 27 и 32 привода сцеплений и магистралей 15, 30, 35, 31 и 36, обеспечивающих подачу рабочей среды от клапана 13 в указанные агрегаты
5Система управления транспортного
средства работает следующим образом
В исходном положении двигатели 1 и 6 выключены, рычаг 57 управления удерживается в исходном вертикальном положении
0 фиксаторами 79 и 93, дроссельные заслонки 38 и 44 карбюраторов 37 и 43 прикрыты, сцепления 2 и 7 выключены, тормоза 5 и 10 расторможены (фиг 1, 4).
После включения двигателей 1 и 6 при
5 их прогреве водитель, воздействуя на рукоятку 58 посредством поводка 59, перемещает тягу 60 с кулачком 61 вниз, сжимая при этом пружину 62. Кулачок 61, взаимодействуя своей рабочей поверхностью с роликом 64 тяги 63, заставляет ее переместиться
вместе с коническим кулачком 65 вперед, одновременно сжимая возвратную пружину 66. Продольное передвижение кулачка 65 приводит к тому, что его коническая поверхность, контактируя со сферическими головками тяг 70 и 84, заставляет последние под действием пружин 73 и 87 перемещаться в осевом направлении навстречу друг другу, Вместе с тягами 70 и 84 перемещаются и закрепленные на их концах кулачки 71 и 85, тем самым смещаясь в сторону от толкателей пневматических кранов 28 и 33 (фиг.2 и 3). Величина хода кулачка 65 ограничивается углом поворота рукоятки 58, которая в крайнем положении упирается в поверхность рычага 57. При таком положении рукоятки 58 рычаг 57 управления поворачивают вперед (на фиг.1 против часовой стрелки). Это вызывает поворот относительно опор 50 и 51 водила 49, шестерни 56 и входящих с ней в зацепление зубчатых колес 68 и 82. Вращение зубчатых колес 68 и 82 приводит к синхронному повороту валов 67 и 81 с закрепленными на них цилиндрическими шестернями 69 и 83. Ввиду того, что кулачки 71 и 85 отведены от толкателей пневматических кранов 28 и 33, рабочие пневмоцилиндры 27 и 32 остаются разобщенными с секцией Б ресивера 16, а ведущие и ведомые диски сцеплений 2 и 7 остаются разомкнутыми. Одновременно шестерни 69 и 83 перемещают вперед зубчатые рейки 76 и 90 вместе с тягами 75 и 89, которые выбирая зазоры, взаимодействуют с нижними роликами поворотных кронштейнов 42 и 48. При этом пружины 77 и 91 сжимаются, а шарики фиксаторов 79 и 93 выходят из лунок и перекатываются вдоль пазов 80 и 94 зубчатых реек 76 и 90. Нижние ролики кронштейнов 42 и 48, контактируя с изгибами тяг 75 и 89, изменяют угловое положение упомянутых кронштейнов, которые, поворачиваясь, перемещают тяги 40 и 46, одновременно деформируя пружины 41 и 47. Тяги 40 и 46 поворачивают рычаги 39 и 45 вместе с дроссельными заслонками 38 и 44, приоткрывая последние и обеспечивая подачу топлива в двигатели 1 и 6 в зависимости от угла поворота рычага 57 управления.
Достижение рычагом 57 управления такого углового положения при котором пластины 95 контактируют с упорами 97, обеспечивает максимальный угол открытия дроссельных заслонок 38 и 44. а следовательно и наибольшую подачу топлива в двигатели 1 и 6. При этом ролики поворотных кронштейнов 42 и 48 находятся относительно тяг 75 и 89 на одной горизонтальной линии (это положение показано на фиг 6)
После прогрева двигателей 1 и 6 и снятия усилия с рычага 57 управления пружины 77 и 91 возвращают его в исходное положение, при котором дроссельные заслонки 38 и 44
поворачиваются до положения, соответствующего режиму холостого хода двигателей.
Перед началом движения с рукоятки 58 снимается усилие и кулачок 61 под действи0 ем сжатой пружины 62 перемещает тягу 60 и поводок 59, переводя рукоятку 58 в исходное положение. Перемещение кулачка 61 заставляет тягу 63 под действием пружины 66 переместиться осевом направлении до
5 тех пор, пока концы тяг 70 и 84 не окажутся на цилиндрическом пояске кулачка 65, а кулачки 71 и 85 вновь не встанут напротив толкателей пневматических кранов 28 и 33 (фиг.2, 3). Осевое перемещение тяг 70 и 84
0 обеспечивается возвратными пружинами 73 и 87.,
Трогание с места и прямолинейное движение транспортного средства осуществляется поворотом рычага 57 управления
5 вперед в продольной вертикальной плоскости. При этом поворот водила 49 со втулками 52 и 53, а также вращение зубчатых колес 68 и 82 с валами 67 и 81 приводит к повороту тяг 70 и 84 с кулачками 71 и 85 Кулачки 71 и
0 85. выбирая зазоры, одновременно воздействуют на подпружиненные толкатели пневматических кранов 28 и 33. Кулачок 71, перемещая толкатель пневматического крана 28, соединяет между собой посредством
5 его правой (по чертежу) полости магистрали
30и 29 и разобщая левую полость с магистралью 31 и атмосферой. Кулачок 85 посредством толкателя пневматического крана 33 соединяет через его правую (по чертежу)
0 полость магистрали 35 и 34 и разобщает левую полость с магистралью 36 и атмосферой. Рабочая среда (сжатый воздух), подаваемая под давлением из компрессора 11 по магистрали 12, защитному клапану 13 и ма5 гистралям 14 и 15, направляется в секцию Б ресивера 16. Из секции Б ресивера 16 сжатый воздух по магистрали 30 и 35, через пневматические краны 28 и 33 и магистрали
31и 36 поступает соответственно в подпор- 0 шневые пространства рабочих пневмоцилиндров 27 и 32 привода сцеплений 2 и 7, соединяя их ведущие и ведомые диски
Одновременно с кулачками 71 и 85 на валах 7 и 81 поворачиваются шестерни 69 5 и 83, ремещая вперед связанные с ними зубчатые рейки 76 и 90, а также тяги 75 и 89, которые, выбирая зазоры, в свою очередь взаимодействуют с роликами поворотных кронштейнов 42 и 48 Кронштейны 42 и 48, кинематически связанные с карбюратор ми
37 и A3, поворачивают дроссельные заслонки 38 и 44, увеличивая подачу топлива и обороты двигателей 1 и 6
Следящее действие пневматических кранов 28 и 33 обеспечивает увеличение расхода поступающего в рабочие пнев- моцилиндры 27 и 32 сжатого воздуха в зависимости от величины перемещения подпружиненных толкателей кулачками 71 и 85, Посгому плавное перемещение рычага 57 управления вперед на начальном этапе приводит к плавному соединению ведомых и ведущих частей сцеплений 2 и 7.
Геометрические параметры кулачков 71 и 85, зубчато-реечных механизмов и механизмов управления дроссельными заслонками 38 и 44 подобраны таким образом, что увеличение оборотов двигателей 1 и 6 и темп включения сцеплений 2 и 7 пневмоци- линдрами 27 и 32 обеспечивают соединение ведомых и ведущих дисков сцеплений без резкого трогания транспортного средства с места после переключения передач
После включения сцеплений и кинематического соединения двигателей 1 и 6 с движителями 4 и 9 дальнейший поворот рычага 57 управления приводит к увеличению угла открытия дроссельных заслонок а следовательно и повышению скорости движения транспортного средства.
Движение транспортного средства по криволинейной траектории осуществляется перемещением от исходного положения рычага управления 57 вперед и в сторону поворота. Радиус поворота машины зависит от величины перемещения рычага 57 в сторону поворота.
Например, перемещая рычаг 57 в крайнее переднее положение в продольной вертикальной плоскости (на фиг 1 против часовой стрелки), добиваются того, что дроссельные заслонки 38 и 44 открываются полностью и транспортное средство движется прямолинейно с максимальной для данной передачи скоростью Далее, поворачивая рычаг 57, например, влево, заставляют повернуться в ту же сторону и шестерню 56, которая приводит во вращение зубчатое колесо 68 и 82, при этом первое из них вращается по часовой стрелке (на фиг.1), а второе - против часовой стрелки Вращение колес 68 и 82 сопровождается соответственно поворотом в ту же сторону цилиндрических шестерен 69 и 83, а также перемещением продольных тяг 75 и 89. Вследствие этого тяга 89 продолжает перемещаться вперед, заставляя перекатываться по своей верхней рабочей поверхности ролики кронштейна 48, тем самым поддерживая максимальный угол поворота дроссельной заслонки 44 и наибольшую подачу топлива в двигатель 1. В то же время тяга 75, перемещаясь назад, уменьшает угол поворота дроссельной заслонки 44 и подачу топ- 5 лива в двигатель 6 (перекатывание роликов кронштейна 48 по загибу тяги 89), В результате частота ращения движителя 9 снижается, тогда кг к частота вращения движителя 4 остается постоянной, вследствие чего
0 транспортное средство выполняет поворот с большим радиусом. Увеличение угла поворота рычага 57 управления приводит к тому, что тяга 75 перестает воздействовать на поворотный кронштейн 42, возвращая его в
5 дроссельную заслонку 38 в исходное положение, при котором двигатель 1 работает на минимально устойчивых оборотах. Вместе с цилиндрической шестерней 69 по часовой стрелке поворачивается кулачок 71. возвра0 щая в начальное положение толкатель пневматического крана 28, правая полость которого под действием пружины разобщается с магистралями 30 и 29. а левая полость соединяется с магистралью 29 и атмосфе5 рой. Под действием возвратной пружины воздух из пневмоцилиндра 27 по магистралям 31 и 29 поступает в левую полость пневматического крана 28 а оттуда в атмосферу Сцепление 2 отключается и передача крутя
0 щего момента к движителю прекращается, радиус поворота транспортного средства уменьшается Дальнейший поворот рычага 57 управления влево приводит к тому, что тяга 89 еще больше передвигается вперед,
5 обеспечивая с помощью кронштейна 48 максимальную подачу топлива в двигатель 6 и частоту вращения движителя 9, а тяга 75, на ту же величину перемещаясь назад сжимает пружину 78 и, выбирая зазор, воздей0 ствует на подпружиненный толкатель тормозного крача 18 со следящим действием. Ролик подпружиненного толкателя, перекатываясь по изгибу тяги 75, а затем и по ее нижней рабочей поверхности соединяет
5 посредством верхней (по чертежу фиг.1) полости тормозного крана 18 магистралями 20 и 19 и разобщает нижнюю полост ь с магистралью 19 и атмосферой Рабочая среда под давлением из секции А ресивера 16 по ла0 гистрали 20 через тормозной кран 18 и магистрали 19 и 21 подается в подпоршневое пространство рабочего пневмоцилиндра 17. Срабатывая, рабочий пневмоципиндр 17 приводит в действие тормоз 5, который за5 тормаживает движитель 4.
Вследствие того, что передача крутящего момента от движителя 1 к движителю 4 прекращается и он заторможен, а передача крутящего момента от двигателя 6 к движителю 9 продолжается, транспортное средство совершает поворот вокруг движителя 4, при этом достигается минимальный радиус поворота. Аналогично осуществляется поворот вправо.
Длина продольных тяг 75 и 89, пружин 77 и 78, 91, 92, а также расположение опор 74 и 88 относительно зубчатых реек 76 и 90 позволяет управлять транспортным средством при любом угловом положении рычага 57.
Профиль кулачков 71 и 85, ограниченный углом (обеспечивает плавное соединение дисков сцепления 2 и 7 при воздействии на толкатели пневматических кранов 28 и 33, а профиль упомянутых кулачков, ограниченный углом /, оставляет сцеп- ления включенных после соединения ведомых и ведущих частей до тех пор, пока рычаг 57 управления не будет переведен в исходное положение.
Чтобы выйти из поворота и продолжить прямолинейное движение, необходимо рычаг 57 управления, наклоненный влево, перевести в исходное вертикальное положение. В результате тяга 75 под действием сжатой пружины 78 перемещается вперед, а тяга 89 под действием пружины 91 передвигается назад. Это приводит к тому, что тяга 75 перестает воздействовать на толкатель тормозного крана 18 и его верхняя полость под действием пружины разобщается с магистралями 20 и 19, а нижняя полость соединяется с магистралью 19 и атмосферой. Под действием возвратной пружины воздух из пневмоцилиндра 17 по магистралям 21 и 19 поступает в нижнюю полость тормозного крана 18, а оттуда в атмосферу. Пневмоцилиндр перестает воздействовать на тормоз 5 и на движитель 4 перестает передаваться тормозной момент. Передвижение тяги 89 назад приводит к тому, что ролики кронштейна 48, перекатываясь по верхней рабочей поверхности тяги 89, сначала уменьшают подачу топлива в двигатель 6, а потом переводят двигатель в режим холостого хода. Таким образом, рычаг 57 оказывается в исходном положении (фиг.1) и его перемещение вперед (против часовой стрелки) приводит к увеличению подачи топлива в двигатели 1 и б, включению сцеплений 2 и 7 и движению транспортного средства прямолинейно.
Торможение транспортного средства или его остановка для последующего безударного переключения передач происхо- дит за счет того, что управляющий рычаг 57 поворачивают против часовой стрелки, в вертикальной продольной плоскости до тех пор, пока тяги 75 и 89 не будут синхронно воздействовать нЗ толкатели тормозных
кранов 18 и 23. При этом подпоршневые пространства пневмоцмлидров 17 и 22 соединяются с секцией А ресивера 16 и тормозной момент посредством тормозов 5 и 10
передается на движители 4 и 9 Ограничение поворота рычага 57 обеспечиваем пластинами 96° контактирующими с упорами 98.
Поворот транспортного средства на ме0 сте непосредственно после прогрева двигателей 1 и 6 осуществляется тем, что рычаг 37 управления перемещают от исходного положения в вертикальной поперечной плоскости в сторону поворота.
5Для повышения удобства управления в
пазах 80 и 94 зубчатых реек 76 и 90 могут быть выполнены по нескольку лунок для фиксирования рычага 57 управления в нескольких промежуточных положениях. Уста0 новка между компрессором 11 и ресивером 16 двойного защитного клапана 13 обеспечивает отключение любого издвух контуров, в случае повреждения или нарушения герметичности одного из контуров, автоматиче5 ское наполнение сжатым воздухом любого контура после восстановления его герметичности, сохранение рабочей среды под давлением в обоих контурах в результате отключения их от питающей магистрали 12
0 при резком падении давления в ней вследствие се повреждения или нарушения герметичности.
Устройство позволяет осуществить управление двигателями, сцеплениями и тор5 мозами на любых режимах движения одним рычагом. Размещение механизма отключения сцеплений во время прогрева двигателей внутри рычага 57 и валов 67 и 81, а также установка рукоятки 58 непосредственно на
0 рычаге 57 повышает удобство и упрощает управление. Кроме того, наличие только одного компрессора, одного ресивера и одного рычага управления уменьшает габариты системы управления при обеспечении ее
5 высокой эксплуатационной надежности, благодаря установке двойного защитного клапана.
Формула изобретения
1. Система управления транспортного
0 средства, имеющего левый и правый двигатели, связанные посредством сцеплений и коробок передач с правым и левым движителями, компрессор, сообщенный трубоп- ровс м с ресивером, содержащая
5 тормо 3ie краны, связанные магистралями подвода рабочей среды с рабочими пневмо- цилиндрами привода тормозов и р сиве- ром, двухпозиционные пневматические краны управления рабочими пневмоцилин- драми привода сцеплений поперечные алы с кулачками, кинематически связанные продольными тягами с механизмами подачи топлива, механизм осевого перемещения поперечных валов с рукояткой управления отличающаяся тем что, с целью повышения удобства в управлении она снабжена поворотной рамкой с центральным валом, на одном конце которого закреплена коническая шестерня, а на другом - рычаг управления, поперечные валы снаб- жены цилиндрическими шестернями и коническими шестернями входящими в зацепление с конической шестерней центрального вала, при этом механизмы подачи топлива снабжены поворотными кронштей- нами с роликами, а продольные тяги - зубчатыми рейками и размещены с возможностью взаимодействия с цилиндрическими шестернями поперечных валов тормозными кранами и поворотными крон- штейнами механизмов подачи топлива при
этом на рычаге управления закреплена рукоятка управления механизмом осевого перемещения поперечных валов выполненным в виде тяг с кулачками размещенными в рычяге управления центральном и попе речных валах с возможностью взаимодействия между собой и с поперечными валами причем двухпозиционные пневматические краны управления рабочими пневмоцилин- драми привода сцеплений размещены с возможностью взаимодействия с кулачками поперечных валов
2 Система управления поп1 отличающаяся тем что. с целью уменьшения габаритных размеров, ресивер выполнен двухсекционным, одна его секция магистралями связана с тормозными кранами, а другая соединена с пневматическими кранами сцепления, при этом в магистрали, связыва- ющей компрессор с ресивером установлен двойной защитный клапан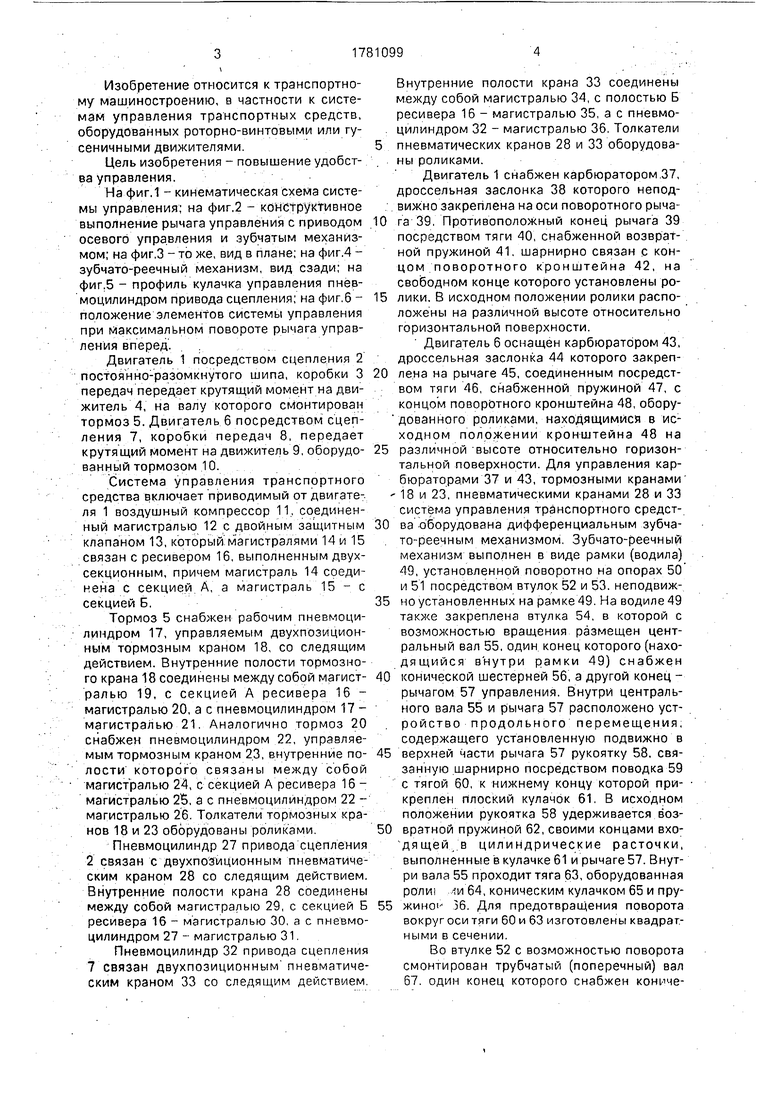
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ В.С.ГРИГОРЧУКА | 1997 |
|
RU2123960C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| Двухрежимная трансмиссия транспортного средства | 1989 |
|
SU1708669A1 |
| Устройство для управления коробкой передач с плавным регулированием скорости вращения и механизмом подачи топлива транспортного средства | 1984 |
|
SU1286446A1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Коробка передач | 1984 |
|
SU1204412A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2021909C1 |
| Аэромобиль | 2016 |
|
RU2617000C1 |
| ТОРОВО-РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ "ТРД-КАН21" (ВАРИАНТЫ) | 2006 |
|
RU2327886C9 |
Изобретение относится к транспортному машиностроению, а именно к системам управления транспортных средств, .оборудованных роторно-винтовыми или гусеничными движителями, и позволяет повысить удобства управления при уменьшении габаритов. Цель изобретения - повышение удобства управления. Система управления 47 содержит двигатель 1, сцепление 2, коробку 3 передач, движитель 4, на валу которого смонтирован тормоз 5, Двигатель 6 посредством.сцепления 7 коробки 8 передач передает крутящий моме-нт на движитель Р, оборудованный тормозом 10. Система содержит также компрессор 11, магистраль 12 с двойным защитным клапаном 13, который магистралями 14 и 15 связан с ресивером 16, выполненным двухсекционным. Управление рабочими пневмоцилиндрами 17 и 22 тормозов 5 и 10 производится посредством двухпозиционныхтормозных кранов18и 23 со следящим действием. Управление пневмоцилиндрами 27 и 32 муфт сцепления 2, 7 осуществляется кранами 28 и 33. Управление движением транспортного средства осуществляется одним рычагом 57 управления. 1 з.п. ф-лы, 6 ил. (Л С со о ю ю 0ЙЙ/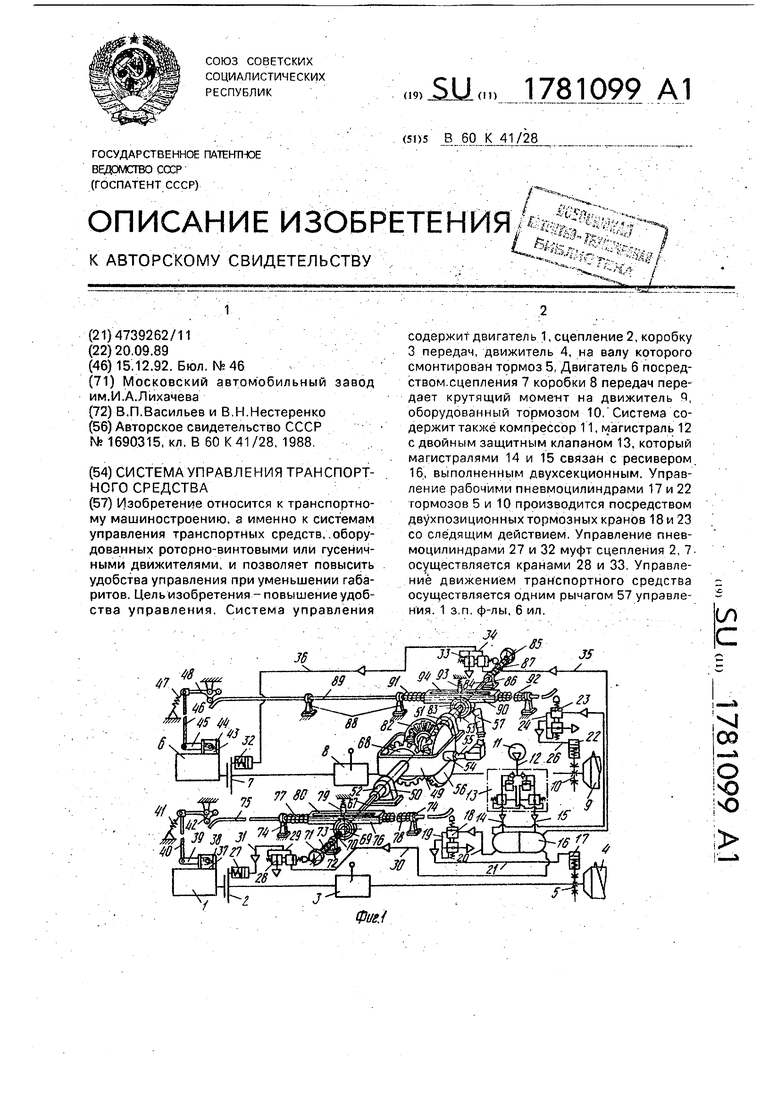
65
Фм.2
576V 62
I
12 6 Э 67 SO 9&
ФигЛ
t
S3 5/ 81 B$ l 86 B S
d
| Авторское свидетельство СССР № 1690315,кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
