Изобретение относится к эксплуатации шахт, к их оборудованию, в частности к дистанционному управлению очистным комбайном, и может быть использовано для автоматического задания режима работы очистным комбайном.
Известен способ управления горной ма- шиной по нагрузке главного двигателя, реализованный в устройстве, основанном на измерении рассогласования между заданным и фактическим значением тока главного двигателя и автоматическом регулировании скорости подачи до момента сравнения величины рассогласования С зоной нечувствительности,
Недостатком известного способа являются значительные погрешности при задании устойчивого момента, так как
используется линейная зависимость изменения момента двигателя (М) от величины тока (I).
Наибольшая погрешность при задании нагрузки достигается в зоне критического момента, где М - f(l) является нелинейной.
Здесь погрешность обусловлена тем, что не учитываются динамические свойства и частотные свойства нагрузки.
Это все в одном случае приводит к снижению производительности очистного комбайна, а в другом - к перегрузке двигателя и трансмиссии режущей части очистного комбайна.
Наиболее близким по технической сущности -и достигаемому эффекту является способ управления горной машиной, основанный на стабилизации нагрузки главного
-VJ
00
«
Јь Ю О
двигателя, включающий непрерывное измерение тока главного двигателя, измерение напряжение питающей сети, корректировку уровня стабилизации нагрузки главного двигателя, измерение разности фаз между током главного двигателя и напряжением питающей сети, задание зависимости сдвига фаз между током двигателя и напряжением пит|1още й с ети отЧока главного двигателя приНтминальной температуре, определение по этой зависимости нормированного фазового сдвига, сравнение его с измерен- ным, преобразование полученного результата тз электричеркий сигнал, суммирование 1го c rtstfeplsfHftbfM значением тока главного д%йРат1эля:и корректировку уровня стабилизации нагрузки главного двигателя путем подачи полученной суммы в токовый канал регулятора нагрузки.
Известный способ реализован устройством.
Устройство управления горной машиной, содержащее датчик тока главного двигателя, выход которого через функциональный усилитель соединен с первым выходом элемента сравнения, датчик напряжения питающей сети, пороговый элементи исполнительный элемент, снабжено фазовым детектором, фильтром, двумя сумматорами, регулятором нагрузки, вторым пороговым элементом и реле времени, причем выход датчика тока главного двигателя соединен с первыми входами первого сумматора и фазового детектора, второй вход которого соединен с выходом датчика напряжения питающей сети, выход фазового детектора соединен со вторым входом элемента сравнения, выход которого подключен к входу фильтра, выход фильтра соединен с входами первого и второго пороговых элементов, а также с первым входом второго сумматора, второй вход которого подключен к выходу первого порогового элемента, выход второго сумматора соединен с вторым вхо- дом первого сумматора, ваход которого подключен к первому входу регулятора нагрузки, при этом выход второго порогового элемента через реле времени соединен с вторым входом регулятора нагрузки, выход которого подключен к исполнительному элементу.
Недостатком известного способа является весьма низкая точность начального задания уставки тока из-за значительных погрешностей в определении рабочей точ: ки на механической характеристике асинхронного двигателя. Это связано с тем, что случайный характер нагрузки на исполнительном органе вызывает неустановившиеся процессы в системе электропривода,
однако в прототипе устойчивый момент оценивается лишь на основе выбора рабочей точки на статической характеристике двигателя в трехсигмовом интервале функции
плотности распределения нагрузок (вариант распределения амплитуд случайного момента по нормальному закону).
Такой способ регулирования не учитывает частотные свойства нагрузки и возможности устойчивой работы привода с учетом динамических свойств режущей части очистного комбайна. К тому же в расчетных формулах используется линейный участок статической характеристики асинхронного
двигателя, хотя, как известно, она значительно отличается от динамической, при этом максимальное мгновенное значение динамического электромагнитного момента в предельном устойчивом режиме лревышает максимум при статической нагрузке в 1 25
I «.4j«),
Недостатком устройства, реализующего известный способ, является то. что во- первых, ко второму входу регулятора
подключается напряжение соответствующее уставке тока, и оно весьма неточно отражает устойчивый момент двигателя, особенно в неустановившихся режимах, во- вторых, это напряжение устанавливается
вручную, а затем в процессе работы комбайна корректируется с учетом нагрева, тока двигателя и напряжения на его, зажимах. При таком регулировании срок службы комбайновых двигателей остается низким (8-10
мес), а выход из строя объясняется механическим износом изоляции (60% общего износа), вызванным колебаниями тока более 1,351Н.
Целью изобретения является увеличение надежности комбайновых двигателей за счет повышения точности систем регулирования к изменению горно-геологических условий.
Это достигается тем, что в способе, основанном на стабилизации нагрузки главного двигателя, включающем непрерывное измерение тока главного двигателя, напряжения питающей сети, измеряют момент сопротивления резанию главного двигателя,
производят спектральный анализ момента сопротивления, определяют среднее значение момента сопротивления, отклонение измеренного момента сопротивления, от его среднего значения, модуль отклонения
5 измеренного момента сопротивления от его среднего значения, среднее значение модуля отклонения момента сопротивления, умножают каждое значение амплиту- ды интерполяционных частот, полученной в
результате спектрального анализа, на среднее значение модуля отклонения и суммируют полученные результаты со средним значением момента сопротивления, результаты суммирования по уравнениям ПаркаТорева поочередно преобразуют в значение частоты вращения ротора и анализируют их изменение за заданные промежутки времени, если значение частоты вращения увеличиваются или остаются неизменными, то соответствующие им весовые коэффициенты вероятности устойчивой работы равны заданным значениям для интерполяционных частот, (иначе-нулю), определяют вероятность устойчивой работы главного двигателя, суммируя весовые коэффициенты, и по ее величине корректируют уровень стабилизации главного двигателя.
Устройство, реализующее способ, содержит датчик главного двигателя, выход которого соединен с первым входом элемента сравнения, датчик напряжения питающей сети, регулятор нагрузки и исполнительный элемент, снабженный датчиком нагрузки, причем его выход одновременно соединен с инвертором-усреднителем, с блоком фильтров, с первым входом сумматора, выход которого последовательно соединен с блоком выделения модуля сигнала и первого усреднителя, а выход первого усреднителя подключен к первому входу блока функциональных усилителей, второй вход которого подключен к выходу блока фильтров, выходы функциональных усилителей подключены к первым входам первого блока схемы И, выход которого последовательно соединен с первым входом второго сумматора, с первым входом аналога привода, вторым усреднителем, первым входом компаратора, первыми входами второго блока схемы И, регистром, цифроаналоговым преобразователем, первым входом элемента сравнения, выход которого соединен с первым входом ключа, а выход последнего подключен к интегратору, соединенному с первым входом третьего сумматора, выход которого последовательно соединен с регулятором и исполнительным механизмом, а на второй вход третьего сумматора подключен датчик тока, также выход усреднителя-инвертора соединен с первым входом второго сумматора, а первые двенадцать выходов коммутатора одновременно подключены ко вторым входам первого блока схемы И, первого входа блока ключей и блоком ИЛИ, выход второго соединен через последовательно соединенные первый вход блока управления со вторым входом компаратора, второй вход блока управления подключен к выходу аналога привода, а тринадцатый выход коммутатора соединен с триггером управления, первый выход которого подключен ко второму входу блока ключей, выход которых соединен со
вторыми входами второй схемы И, также второй выход триггера управления соединен со вторым входом первого ключа, далее выход датчика напряжения подключен ко второму входу аналога привода, а второй
вход элемента сравнения подключен к за- датчику доверительной вероятности.
В предложенном способе за счет использования выделенных частот нагрузки, имеющих существенный вес в общем спектре нагрузки (узловые точки) и проходящих через аналог привода, формируются сигналы пропорциональные устойчивой работы привода на основе накопления весовых коэффициентов для частот нагрузки не опрокидывающей двигатель, что позволяет оперативно отслеживать реальный режим устойчивости двигателя для текущего спектра нагрузки и его амплитуд.
Предложенный способ включает следующие операции.
Спектральный анализ нагрузки на исполнительном opr we.
Формирование гармокических реализаций случайной нагрузки в узловых точках
спектра (Му)
MIJ SF+ 7( t+ A costwi t),
где М - математическое ожидание нагрузки; Aj - узловые частоты нагрузки;
cos - случайная величина равномерного закона распределения;
t - текущее время.
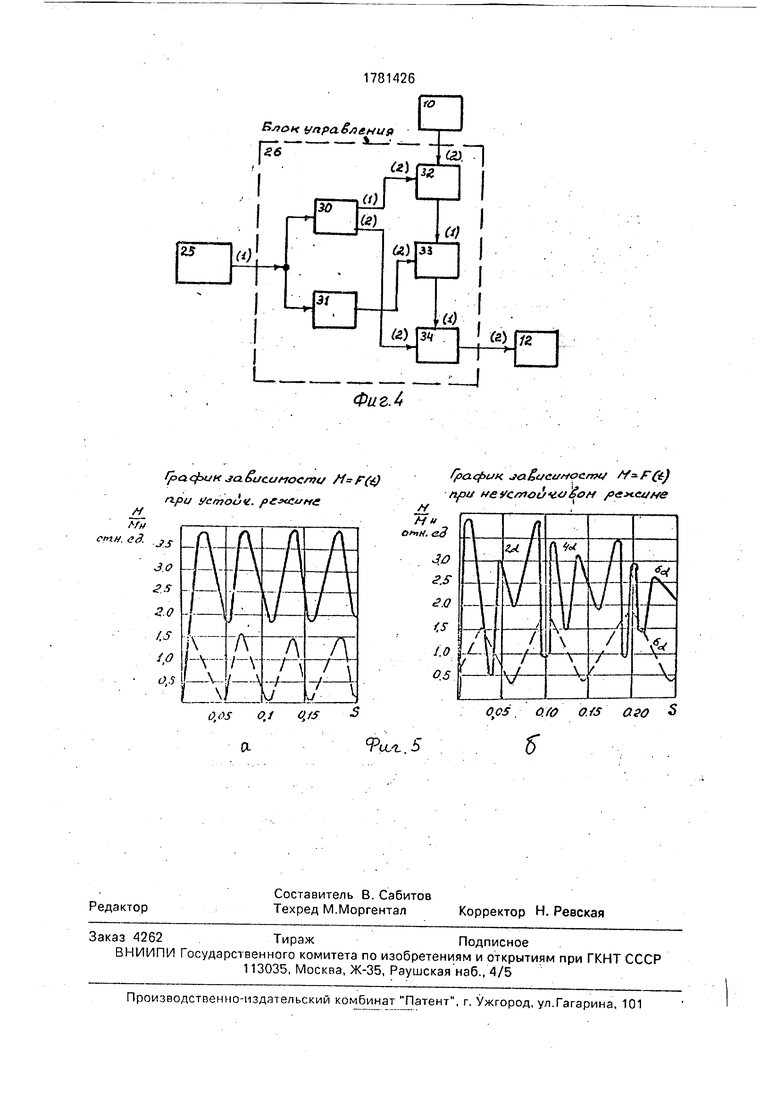
Пропускание каждой гармоники через аналог привода, который реализуется с помощью уравнений ПаркаТорева и далее анализ на устойчивость, (фиг. 5 а - устойчивый режим, б - неустойчивый режим).
Формирование на выходе аналога привода признаков устойчивости или опрокидывания двигателя, т.е. сигналов, пропорциональных характеристическим функциям (единичным или нулевым)
KK(t) +(vK(t)Va.y.K)/l VK(t)
к 1
а.у.к I ,
где vK(t) - текущая частота вращения ротора двигателя при определенной частоте гармонической реализации нагрузки (Мц);
va.y.K -установившееся значение частоты вращения ротора при определенной гармонической реализации нагрузки (Mij).
Сигнал, пропорциональный характеристической функции, принимает два значения
г ПРИ МО НО-|0 при TV (t)
2: Va.y.K. Va.y.K
Суммирование сигналов, пропорциональных вероятности устойчивой двигателя на основе выражения
Р(Т1,Т2) 2 ПК (tK)mi. 0120111. та .ml- m2 к 1
где /Omi. гп2 весовые коэффициенты (числа Кристоффеля);
mi.m2 - количество узлов интерполяции для соответствующих случайных величин ад :Aj;
П, Г2 - интервал исследования.
Задание уставки регулятора на основе спектральных свойств нагрузки, которые остаются практически неизменными для данной лавы. Гармонические составляющие можно получать с помощью резонансных фильтров, параметры которых определяются видом корреляционной функции (R(r )) нагрузки
R(r) cos/ r где с 1 (1)
Количество узлов l-( w) определяется шестью, a J-$ ) - двумя. Количественный состав гармоник определяется точностью вычисления вероятности устойчивой работы, при этом погрешность (с5д) определяется 1- 2 Pmi.m2 . ml, m2
Узлы для случайных величин ад и AJ выбираются из 8, а затем на основе функционального преобразования, определяемого видом корреляционной функции, получаем требуемые узлы.
В частном случае, для корреляционной функции R( r) о2 е cos/Згзакон распределения случайной величины (а имеет вид
f (у) (а/2 л:) (о2 + ( )1 +
+ (о2+()8-й)2)1.
Суммирование в формулах осуществляется по всем сочетаниям узлов случайных величин «у и А .
Сравнение признаков известных и предложенного показывает наличие следующих отличий - спектрального анализа нагрузки по частотам, имеющим существенный вес в
спектре нагрузки (новый материальный объект), оценка устойчивости двигателя для каждой гармоники (пример устойчивого и неустойчивого режима привода показан на фиг. 5), накопление на основе характеристи0 ческих функций весовых коэффициентов, формирующих сигнал пропорциональный вероятности устойчивой работы привода режущей части очистного комбайна, задание уставки нагрузки на основе этого сигнала.
5 Для реализации предложенного способа разработана схема устройства (фиг. 1): на фиг. 2 - диаграмма работы устройства; на фиг. 3 и 4 - функциональные схемы; на фиг. 5 - график зависимости при устойчивом и
0 неустойчивом режимах.
Устройство содержит датчик нагрузки 1, выход которого соединен с входами инвертора-усреднителя 2, блоком фильтров 3 и первым входом сумматора 4 последователь5 но соединенного с блоком выделения модуля 5 и первым усреднителем 6, при этом выход усреднителя 6 подключен к первому входу блока функциональных усилителей 7, второй вход которого подключен к выходу
0 блока фильтров 3, выходы функциональных усилителей 7 подключены к первым входам первого блока схемы И 8, выход которого последовательно соединен с первым входом второго сумматора 9, первым входом
5 аналога привода 10, вторым усреднителем 11, первым входом компаратора 12, первыми входами второго блока схем И 13, регистром 14, цифроаналоговым преобразователем 15, первым входом элемента
0 сравнения 16, выход которого соединен с первым входом ключа 17, а выход последнего подключен к интегратору 18, соединенному с первым входом третьего сумматора 19. выход которого последовательно соединен
5 с регулятором 20 и исполнительным механизмом 21, а второй вход третьего сумматора 19 подключен к датчику тока 22, также выход инвертора-усреднителя 2 соединен со вторым входом второго сумматора 9, а
0 первые двенадцать выходов коммутатора 23 одновременно подключены ко вторым входам первого блока схем И 8, блока ключа 24 и блоком ИЛИ 25, выход которого соединен через последовательно соединенные пер5 вый вход блока управления 26 со вторым входом компаратора 12, второй вход блока управления 26 подключен к выходу аналога привода 10, также тринадцатый выход коммутатора 23 подключен к триггеру управления 27, первый выход которого подключен
ко второму блоку ключа 24, а их выход соединен со вторым входом второго блока схем И 13, также второй выход триггера управления 27 соединен со вторым входом ключа 17, а выход датчика напряжения 28 подключен ко второму входу аналога привода 10, и второй вход элемента сравнения 16 подключен к задатчику доверительной вероятности 29. Блок управления 26 представлен на фиг. 4 содержащий ждущие мультивибраторы задержки времени 30 и сброса 31, входы которых соединены с блоком ИЛИ 25, при этом первый выход мультивибратора 30 соединен со вторым входом ключа 32, первый вход которого соединен с аналогом привода 10, а также выход ключа 32 через усреднитель 33 (вход 1) подключен к первому входу ключа 34, второй вход которого соединен со вторым выходом мультивибратора 30, а выход ключа 34 соединен с первым входом компаратора 12, наконец, выход мультивибратора 31 подключен ко второму входу усреднителя 33.
Способ осуществляется следующим образом.
Сигнал от датчика нагрузки 1 усредняется и инвертируется блоком 2 и поступает на сумматор 4, где выделяется сигнал соответствующий отклонению от среднего значения (математического ожидания).
Выделенный модуль этого сигнала с помощью блока 5, а затем усредненный блоком 6 образует сигнал пропорциональный среднеквадратичному отклонению а(сред- нее значение модуля отклонения).
Одновременно сигнал нагрузки поступает на блок двенадцати фильтров 3, где осуществляется спектральное разложение его на составляющие вида (sin cot t + + Д$ cos од t).
Эти гармонические сигналы поступают на двенадцать первых входов функциональных преобразователей 7, а на вторые входы этих преобразователей поступает усредненный сигнал среднего значения модуля отклонения (среднее квадратическое отклонение) с блока 6. В результате на входах двенадцати функциональных преобразователей 7 образуется сигнал, пропорциональный произведению входных сигналов, т.е. поочередно с помощью двенадцати схем И 8 эти гармонические сигналы поступают на сумматор 9, где складываются с напряжением, пропорциональным средней нагрузке (М), полученном на блоке 2 и, таким образом, на выходе сумматора 9 образуется сигнал со следующей зависимостью:
CT(slnuJ|t+ +AjCOS У| t),.
Блок-схема И 8, управляется двенадцатью первыми шинами коммутатора 23, обеспечивающими очередность подачи гармоник с блока 7 на сумматор 9. 5Каждая гармоническая составляющая
нагрузки с блока 9 поступает на аналог привода 10, описанный с помощью уравнений Парка-Горева (1).
Выходное напряжение, отражающее ча0 стоту вращения ротора, с блока 10 поступает на усреднитель 11, а затем на первый вход компаратора 12 (отрицательная обратная связь), одновременно напряжение с блока 10 поступает в блок управления 26,
5 где 3-5 периода гармонического сигнала, поступающего с блока 10, формируется значение частоты вращения ротора (.у.к), которое с задержкой 3-5 периода подается на второй вход компаратора 12 (положитель0 ная обратная связь). Управление блоком 26 осуществляется схемой ИЛИ 25, запускающейся от коммутатора на каждый командный импульс, а запуск блока управления 26 осуществляется схемой ИЛИ 25, на которую
5 от коммутатора 23 поступает двенадцать импульсов, переводящих ждущие мультивибраторы 30 и 31 в неустойчивое состояние (время неустойчивого состояния мультивибратора 31 больше чем мультивибратора 30),
0 с мультивибратора 30 (первый выход) подается сигнал на открытие ключа 32, который разрешает прохождение сигнала с аналога ; привода на усреднитель 33, за 3-5 периодов сигнала формируется установившееся зна5 чение частоты вращения ротора ( Уа.у.к).
Возврат мультивибратора 30 в устойчивое
состояние сопровождается закрытием клю ча 32, открытием ключа 34 (по входу 2) и
сигнал с усреднителя 33 поступает на вто0 рой вход компаратора 12, где сравнивается с текущим сигналом с усреднителя 11 (фиг.
U
По истечении времени сравнения
мультивибратор 31 переходит в устойчи- 5 вое состояние и обнуляет содержимое усреднителя 33.
Так процесс повторяется для каждой гармонической составляющей нагрузки, т.е. на каждый из двенадцати импульсов компа- 0 ратора. Если текущие значения частоты вращения ротора на первом входе компаратора 12 снизилось по сравнению с va.y.K . то компаратор переходит в неустойчивый режим, что соответствует неустойчивому режиму 5 двигателя (характеристическая функция w ), в противном случае к 1, т.е. наблюдается устойчивый режим двигателя. На каждый из двенадцати тактов коммутатора 23 сигнал с компаратора 12 ( ATI 0 или к 1)
посредством второго блока схем И 13 заносится в регистр 14. Занесение информации в регистр 14 осуществляется в режиме идентификации, а управление этим режимом выполняет блок ключей 24. работу которого в свою очередь контролирует триггер управления 27. Последний единичным состоянием на первом выходе разрешает прохождение сигналов с коммутатора 23 на схему И 13. В этом режиме уставка тока на сумматоре 19 не меняется ввиду того, что входной сигнал элемента сравнения 16 не поступает через ключ 17 на интегратор 18. так как в режиме идентификации ключ 17 закрыт вторым выходом триггера управления 27.
Режим идентификации завершается тринадцатым импульсом коммутатора, который переводит триггер управления 27 в режим обучения. Ё этом случае ключ 17 открывается, а блок ключей 24 закрывается, поэтому сигнал с регистра 14 через цифроаналоговый преобразователь 15, на котором формируется текущая вероятность устойчивой работы привода (Р 2 П/о (t )pmi. та). поступает на эле- mi, т2 1
мент сравнения и далее с помощью ключа 17 на интегратор 18, благодаря чему происходит изменение напряжения на элементе сравнения 19. Этим самым изменяется задание уставки тока на регуляторе 20 в зависимости от устойчивости двигателя. Режим обучения и идентификации длится по 12 тактов коммутатора 23. Диаграмма работы устройства представлена на фиг. 2. а. б. в. В зависимости от напряжения шахтной сети изменяются механические характеристики двигателя, тем самым учитывается и этот фактор, влияющий на вероятность устойчивой работы привода, так как напряжение с
датчика участвует в формировании электромагнитного момента двигателя в аналоге привода.
Формула изобретения
Способ управления горной машиной, основанный на измерении тока главного двигателя и по его величине корректировании уровня стабилизации нагрузок, отличающийся тем, что, с целью повышения
надежности и точности управления за счет анализа изменения горно-геологических условий, измеряют момент сопротивления резанию главного двигателя, производят спектральный анализ момента сопротивления, определяют среднее значение момента сопротивления, отклонение измеренного момента сопротивления от его среднего значения, модуль отклонения измеренного момента сопротивления от его среднего
значения, среднее значение модуля отклонения момента сопротивления, умножают каждое значение амплитуды интерполяционных частот, полученной в результате спектрального анализа, на среднее значение модуля отклонения и суммируют полученные результаты со средним значением момента сопротивления, результаты суммирования по уравнениям Парка-Горева поочередно преобразуют в значения частоты
вращения ротора и анализируют их измене- . ние за заданные промежутки времени, если значения частоты вращения увеличиваются или остаются неизменными, то соответствующие им весовые коэффициенты вероятности устойчивой работы равны заданным значениям для интерполяционных частот (иначе-нулю), определяют вероятность устойчивой работы главного двигателя, суммируя весовые коэффициенты, и по ее
величине корректируют уровень стабилизации главного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Устройство для управления преобразователем частоты с непосредственной связью | 1976 |
|
SU592003A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |
| Амплитудный детектор | 1988 |
|
SU1615631A1 |

Изобретение относится к горной промышленности, а именно к способам управления горной машиной, позволяет повысить надежность и точность управления за счет анализа изменения горно-геологических условий. Разделяют сигнал случайной нагрузки на гармонические составляющие, которые поочередно пропускают через аналог привода и на выходе получают частоты вращения ротора, по которым в случае устойчивости двигателя формируются единичные функции, а в случае неустойчивости - нули. Определяют вероятность устойчивой работы главного двигателя, суммируя весовые коэффициенты, и по ее величине корректируют уровень стабилизации главного двигателя. 5 ил.
9Ш8а
-к
I
ч- ч- «ч
Cfe
Cj
I
-§
Г
Ш1Ш
1 /7#ЗЦ 0Ж//7
JL JL JL Д. М Jfa.
3L1
N v N i 5
1
5Q
Ј
Y-.
tei
4s
±
m
s
1
l Блок упраблениэ
Г.
fpd фин ja бисапости (4) при устои, ре-хате
флфик. jd fjcuffocmt/ ) при не с/поич.&Јом /нтсмне
Фил..5
| Стариков Б.Я., Азарх В.Л., Рабинович З.М | |||
| Асинхронный электропривод очистных комбайнов | |||
| - М.: Недра, 1981, с | |||
| ДВОЙНОЙ ГАЕЧНЫЙ КЛЮЧ | 1920 |
|
SU288A1 |
| Авторское свидетельство СССР №1160034, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
