Изобретение относится к электротехнике и может быть использовано для управления электроприводом конвейеров.
Целью изобретения является повышение эффективности демпфирования упругих колебаний тягового органа конвейера.
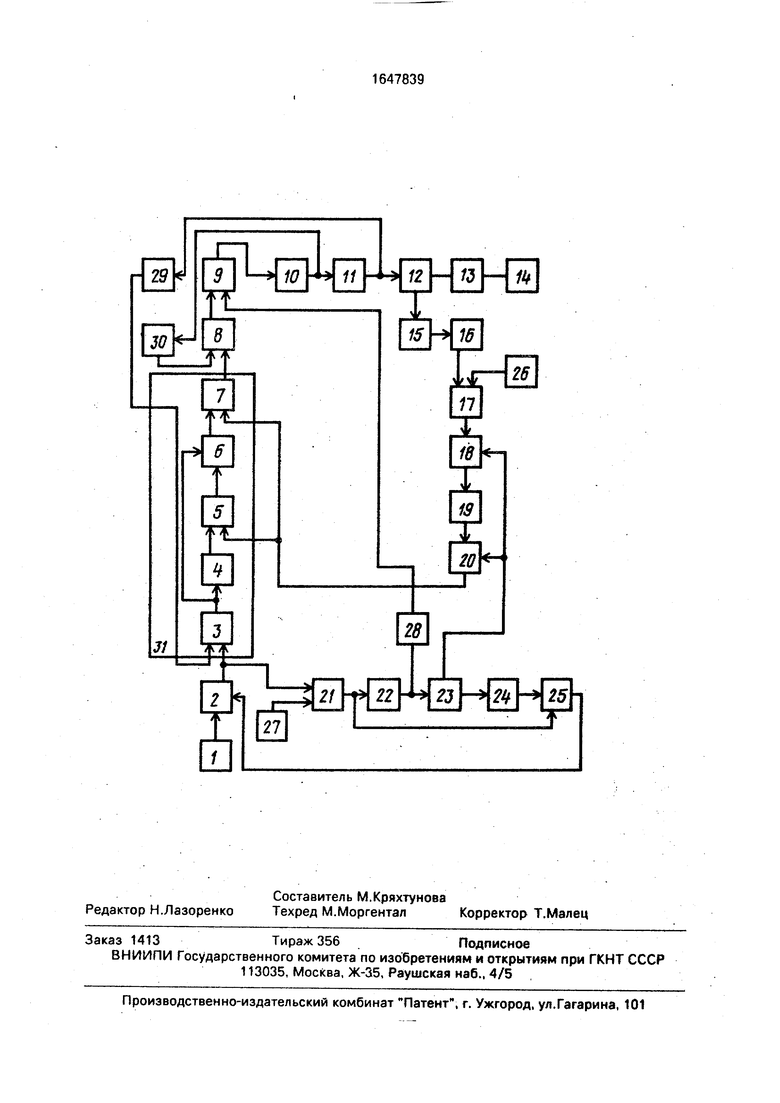
На чертеже представлена схема электропривода, реализующего способ.
Электропривод скребкового конвейера содержит последовательно соединенные задатчик 1, задатчик 2 интенсивности, второй сумматор 3, интегратор 4, первый блок 5 деления, третий сумматор 6, второй блок 7 деления, регулятор 8 тока, первый сумматор 9, управляемый выпрямитель 10, электродвигатель 11, редуктор - ведущую звездочку 12, цепной тяговый орган 13 и ведомую звездочку 14. Датчик 15 усилий ведущей звездочки подключен к последовательно соединенным первому дифференциатору 16, первому компаратору 1 /, первому ключу 18, преобразователю 19 период-напряжение и элементу 20 памяти, выход которого подключен к вторым входам блоков 5 и 7 деления, выход задатчмка 2 интенсивности подключен к последовательно соединенным второму компаратору 21, второму дифференциатору 22, ждущему мультивибратору 23, инвертору 24 и второму ключу 25. подключенному к второму входу задатчика 2 интенсивности. Выход ждущего мультивибратора 23 соединен с управляющим1 входами первого ключа 18 и элемента 20 памяти. Выход второго компаратора 21 подключен к управляющему входу второго ключа 25. Первый блок 26 уставки соединен с вторым входом первого компаратора 17, а второй блок 27 уставки - с вторым входов второго компаратора 21. Выход второго дифференциатора 22 через блокинг-генера« &
тор 28 подключен к второму входу первого сумматора 9. Датчик 29 скорости соединен с вторым входом второго сумматора 3, а датчик 30 тока - с вторым входом регулятора 8 тока. Выход второго сумматора 3 соединен с входом третьего сумматора 6. Второй и третий сумматоры 3 и 6, интегратор 4, первый и второй блоки 5 и 7 деления и их связи образуют регулятор 31 скорости.
Способ осуществляется следующим образом.
Демпфирование упругих колебаний в упругой связи достигается при следующих настройках ПИ-регулятора скорости в электроприводе подчиненного регулирования скорости и тока
Крс Кт-Тм2чи Ј19 .
., To
где Крс - коэффициент усиления ПИ регулятора скорости;
т,- постоянная времени ПИ регулятора скорости;
Кт - коэффициент передачи датчика тока,
ТмЈ Тмд - Тм,
где ТМд - механическая постоянная двигателя;
Тм механическая постоянная механизма;
Ј - коэффициент демпфирования для промышленных электроприводов Ј 0,05- -0,1
мЈ
9
1Д - момент инерции двигателя;
м - момент инерции механизма;
- частота собственных упругих колебаний.
В тяговых органах конвейеров вместе с вынужденными колебаниями возникают автоколебания с частотой, практически равной собственной частоте механической системы.
Тяговый орган конвейера является упругой системой, но частота его собственных колебаний изменяется в процессе работы от вытяжки и износа цепей, изменения натяжения и других случайных факторов Поэтому для повышения демпфирующей способности электропривода скребкового конвейера необходимо изменять параметры настройки регулятора скорости в соответствии с изменяющейся частотой собственных колебаний тягового органа Для измерения частоты собственных колебаний измеряют период распространения
волн деформации по тяговому органу от ведущей звездочки до ведомой.
При каждом пуске электропривода скребкового конвейера, по окончании процесса выборки зазоров в редукторе, задают кратковременный одиночный импульс. Поэтому импульсу формируют стробирую- щий импульс и пробный одиночный импульс момента электродвигателя с амп0 литудой, меньшей момента трогания конвейера. Импульс момента вызывает импульс усилий в тяговом органе и создает прямую волну деформации, которая отражается от ведомой звездочки и возвращается
5 к ведущей и далее процесс продолжается до полного затухания.
Период следования упругих волн деформации, зафиксированный датчиком усилий на ведущей звездочке, равен периоду
0 собственных колебаний тягового органа конвейера Т.
При выборе длительности пробного импульса т.и (tw Е) колебания, возбуждаемые одиночным пробным импульсом, являются
5 собственными, так как собственные колебания органа - это упругие колебания, обусловленные статической неуравновешенностью системы и происходящие без воздействия внешних сил во время совершения колеба0 ний,
Импульсы усилий дифференцируются и сравниваются с уставкой производной усилий, что позволяет выделить из сигнала усилий составляющие, возбуждаемые пробным
5 импульсом. Далее с помощью стробирую- щего импульса, повышающего помехоустойчивость и надежность измерения, выделяют несколько периодов собственных колебаний тягового органа и их измеряют.
0 Измеренный период собственных колебаний запоминают и в соответствии с запомненной величиной периода изменяют коэффициент усиления и постоянную времени ПИ-регулятора скорости. Коррекция
5 параметров регулятора скорости производится в процессе каждого пуска конвейера. Электропривод работает следующим образом,
Сигнал с задатчика 1 поступает на за0 датчик 2 интенсивности Выходной сигнал задатчика 2 интенсивности через регулятор 31 скорости, регулятор 8 тока и первый сумматор 9 поступает на управляемый выпрямитель 10. Электродвигатель 11 начинает
5 вращаться с малой скоростью, выбирая зазоры в редукторе 12. Одновременно сигнал с выхода зздатчика 2 интенсивности сравнивается на входе второго компаратора 21 с сигналом второго блока 27 уставки, амплитуда которого выбирается равной ползучей
скорости электродвигателя 11, необходимой для выборки зазоров в редукторе. При превышении сигнала, задатчика 2 интенсивности уставки блока 27 второй компаратор 21 срабатывает и по фронту его выходного сигнала второй дифференциатор 22 формирует запускающий импульс блокинг-генератора 28 и ждущего мультивибратора 23. Импульс блокинг-генератора 28, являющийся пробным, поступает на второй вход первого сумматора 9, где суммируется с выходным сигналом регулятора 8 тока. Момент электродвигателя 11 содержит импульсную составляющую, формируемую блокинг-генератором 28, и постоянную составляющую, формируемую регулятором 8 тока. Амплитуда пробного импульса Ти выбирается соответствующей номинальному моменту электродвигателя, а длительность пробного импульса блокинг- генератора 28 W и длительность импульса ждущего мультивибратора 23 tMM - из условий
tMr Тп « t-им;
tnr (4-5)Тк,
где Тк - период коммутации управляемого выпрямителя 10,
Длительность пробного импульса выбирается большей периода коммутации, так как импульс блокинг-генератора 28 может быть сформирован в момент времени, когда пара вентилей уже открыта, и в этом случае пробный импульс на выходе управляемого выпрямителя 10 появляется в следующем цикле коммутации. Импульсная составляющая момента электродвигателя 11 создает прямую волну деформации, которая,распространяясь по тяговому органу 13, отражается от ведомой звездочки 14 и возвращается в виде отраженной волны деформации к ведущей звездочке 12 и т.д. Сигнал, измеренный датчиком 15 усилий, поступает на первый дифференциатор 16. Этот сигнал сравнивается в первом компараторе 17 с выходным сигналом первого блока 26 уставки. Так как производная сигнала усилий Ui, возбуждаемых прямыми и отраженными волнами деформации от пробного импульса, больше производной усилий U2 от посто- янной составляющей момента электродвигателя 11, возбуждаемого сигналом регулятора 8 тока, то при выборе амплитуды сигнала блока 26 уставки U3 в диапазоне
I 1Ы ШзК I Uil.
на выходе первого компаратора 17 выделяется только производная сигнала усилий от пробного импульса. Этот сигнал поступает на информационный вход первого ключа 18, на управляющем входе которого присутствует импульс ждущего мультивибратора 23.
Импульс ждущего мультивибратора 23 является стробирующим импульсом. Так как он синхронизирован с импульсом блокинг-генератора 28, а длительность импульса ждущего мультивибратора выбирается равной нескольким (4-5) максимально возможным периодам собственных колебаний тягового органа, то сигнал на выходе первого ключа 18 появляется только в период возбуждения
пробного импульса на строго ограниченное время, что повышает надежность и помехоустойчивость измерения. Импульсная последовательность с выхода первого ключа 18 поступает на ждущий мультивибратор 23
преобразователя 19 период - напряжение.
Аналоговое напряжение U4 КТТ - ,
где (t)u - частота собственных колебаний тягового органа 13;
Ki - коэффициент преобразования преобразователя 19 период- напряжение, пропорциональное периоду собственных колебаний, с выхода преобразователя 19 период - напряжение поступает в элемент 20
памяти, на управляющий вход которого подается стробирующий импульс ждущего мультивибратора 23.
Напряжение UA запоминается до следующего пуска электропривода, т.е. до следующего запуска блокинг-генератора 28 и ждущего мультивибратора 23. Сигнал с выхода элемента 20 памяти поступает в регулятор 31 скорости, на вторые входы первого и второго блоков 5 и 7 деления. Уравнение
ПИ регулятора 31 скорости имеет вид
U5(U7-U6) Јf(1 +
К2
U4-T2
где Us выходной сигнал второго блока 7 деления;
U - выходной сигнал задатчика 2 интенсивности;
Ue - выходной сигнал датчика 29 скоро- сти;
К2 - коэффициент преобразования блоков 5 и 7 деления;
Р - оператор дифференцирования; Та - постоянная времени интегратора 4; (Uy-Ue) - выходной сигнал второго сумматора 3, являющийся ошибкой по скорости.
При выборе коэффициентов
Ki ; Ка КТ Тм ; Т2 2 «2 l7
уравнение регулятора 31 скорости приводится к виду
U5(U7-U6)yЈr КтТм 2 (
1 +
щ
2 fЈ-q
Коэффициент усиления регулятора 31 скорости изменяется пропорционально частоте собственных колебаний тягового органа, а постоянная времени - обратно пропорционально йД..
Коррекция постоянной времени и коэффициента усиления регулятора 31 скорости производится при каждом пуске конвейера в соответствии с изменившимся периодом собственных колебаний тягового органа. Таким образом, задание кратковременного пробного импульса момента электродвигателя при каждом пуске электропривода после процесса выборки зазоров в редукторе, выделение прямых и отраженных волн деформации от пробного импульса датчиком усилий на ведущей звездочке, измерение, фмкрация и запоминание периода собственных колебаний тягового органа и изменение постоянной времени и коэффициента усиления ПИ регулятора скорости в соответствии с изменяющимся периодом собственных колебаний тягового органа обеспечивают повышение эффективности демпфирования при изменяющейся частоте собственных колебаний тягового органа.
Формула изобретения 1. Способ управления электродвигателем скребкового конвейера, по которому задают скорость электродвигателя, измеряют скорость и ток электродвигателя, сравнивают с заданным и по разности формируют управляющее воздействие на электродвигатель, отличающийся тем, что, с целью повышения эффективности демпфирования упругих колебаний, дополнительно при каждом пуске электропривода задают одиночный импульс момента электродвигателя с амплитудой, меньшей момента трогания конвейера, измеряют усилия на ведущей звездочке конвейера, фиксируют и запоминают период собственных колебаний тягового органа конвейера и при его изменении корректируют постоянную времени и коэффициент усиления регулятора скорости в соответствии с изменяющимся периодом собственных колебаний.
2. Электропривод скребкового конвейера, содержащий задатчик, последовательно соединенные регулятор скорости, регулятор тока, связанный с управляемым выпрямите5 лем, подключенным к последовательно соединенным электродвигателю, редуктору - ведущей звездочке, цепному тяговому органу и ведомой звездочке, датчики скорости и тока, подключенные к вторым входам соот10 ветствующих регуляторов, и датчик усилий ведущей звездочки, отличающийся тем, что, с целью повышения эффективности демпфирования упругих колебаний тягового органа конвейера, в него дополнительно
15 введены задатчик интенсивности.включенный между задатчиком и регулятором скорости, блокинг-генератор, а также последовательно соединенные первый дифференциатор, первый коммутатор, первый ключ, преобразова20 тель период - напряжение и элемент памяти, последовательно подключенные второй компаратор, второй дифференциатор, ждущий мультивибратор, подключенный к инвертору и управляющим входам первого ключа и
25 элемента памяти, первый и второй блоки уставки, соединенные с вторыми входами соответствующих компараторов, первый сумматор, подключенный своим первым входом к регулятору тока, вторым входом 30 к блокинг-генератору, соединенному с выходом второго дифференциатора, а выходом - к управляемому выпрямителю, выход инвертора соединен с вторым ключом, выход которого подключен к управляющему
35 входу задатчика интенсивности, а управляющий вход- к выходу второго компаратора, регулятор скорости выполнен в виде последовательно соединенного второго сумматора, интегратора, первого блока деления,
40 третьего сумматора и второго блока деления, подключенного к входу регулятора тока, первый вход второго сумматора соединен с выходом задатчика интенсивности, второй вход - с датчиком скорости, а
45 выход - с вторым входом третьего сумматора, выход элемента памяти подключен к вторым входам блоков деления, выход задатчика интенсивности - к первому входу второго компаратора, а выход датчика
50 усилий - к входу первого дифференциатора.
29

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1988 |
|
SU1617605A1 |
| Устройство дифференциальной защиты | 1985 |
|
SU1272392A1 |
| Устройство защиты горных машин от перегрузок | 1982 |
|
SU1082948A1 |
| Устройство частотно-импульсного регулирования тока RL-нагрузки | 2023 |
|
RU2810553C1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Дозатор непрерывного действия | 1987 |
|
SU1506286A1 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
Изобретение относится к электротехнике и может быть использовано для управления электроприводом конвейера. Целью изобретения является повышение эффективности демпфирования упругих колебаний тягового органа конвейера.По данному способу при каждом пуске конвейера блокмнг-генераторорл формируют импульс момента электродвигателя, датчиком усилий на ведущей звездочке выделяют прямые и отраженные волны деформаций от пробного импульса. Дифференциатор, компаратор, ключ, преобразователь и элемент памяти определяют период собственных колебаний тягового органа конвейера. В соответствии с указанным периодом корректируют постоянную времени и коэффициент усиления регулятора с оростм, что обеспечивает повышение эффективности демпфирования. 1 з.п. ф-лы, 1 ил.
| Способ демпфирования колебаний в элетроприводе и устройство для его осуществления | 1977 |
|
SU693525A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
