Изобретение относится к сельскохозяйственному производству, преимущественно к определению относительных координат мобильной сельскохозяйственной машины.
Известны способы определения относительных дальностей между объектами путей Определения времени, в течение которого непрерывно излучаемы радиоволны пройдут расстояние между нйми от передатчика на одном объекте до ответчика на другом и обратно. При этом излучаемые и возвратные радиоволны имеют различию- щиеся фазы. Разность фаз регистрируют фазометром.
Известен, кроме того, способ, в котором радиочастота е ще и циркулирует между объектами, пробегая дальность между ними многократно, причем дальность определя: ют по частоте циркуляции радиочастоты.
Известен тпкже способ определения относительной дальности между подвижным и неподвижным объектами на плантации, заключающийся е том, что с подвижного объекта излучают в направлении неподвижного объекта масштг1бную частоту f, модулирующую первую несущую радиоволну, переизлучают масштабную частоту f с неподвижного объекта на второй несущей радиоволне, принимают и детектируют на подвижном объекте переизлученную масштабную частоту f и измеряют разность фаз между излучаемой и принимаемой масштабной частотой который целесообразно принять за прототип. По этому способу радиочастота еще и циркулирует между объектами, проходя дальность многократно.
Недостаток этого способа, как и у аналогов, в малой точности определения относительной дальности при использовании радиоволн дифракцирующих на макрорельефе плантации, т.е. метровых и более длин- ных. Кроме того, при выполнении мобильной сельхозмашиной агроприемов на плантации измеряемая дальность между подвижным и неподвижным объектами меняется от нескольких метров до полутора- двух километров на каждом проходе сельхозагрегата. Поэтому число переизлучений (при приложении этого способа к аг- роприемам) изменяется в тысячи раз. Столь же непостоянна и аппаратурная погрешность, т. к. она пропорциональна числу песл С
4 00
С СЯ
Ј
реизлучений. Оперативно учесть в реальном масштабе времени движущегося по плантации сельскохозяйственного агрегата столь резко меняющуюся аппаратурную погрешность практически невозможно, что также существенно снижает точность определения относительной дальности.
Целью изобретения является повышение точности определения относительной дальности, достигаемое заданным четным числом пробегов (но не менее 4-х) масштабной частотьГпо мультикратно изменяющейся во времени дальности между подвижным и неподвижным объектами путем переноса масштабной частоты по каждому пробегу на различающихся радиочастотных каналах и делением разницы фаз между первой излучаемой и последней возвратной масштабной частотой на число пробегов т.
Сущность изобретения заключается в том, что погрешность измерения разницы фаз масштабной частоты одна и та же на все ее пробеги между объектами, вне зависимости от их количества. Поэтому на один пробег она (разница фаз Ар ) во столько раз меньше измеренной - сколько пробегов m сделана масштабная частота. Тем самым повышают точность определения относительной дальности между подвижным и неподвижным объектами.
Достигают цель тем, что после детектирования масштабную частоту f дополнительно переизлучают с подвижного объекта, передавая ее многократно между подвижным и неподвижным объектами заданное число m раз на различающихся между собой несущих радиоволнах, дифрацирующих на макрорельефе плантации, измеряют разность фаз между масштабной частотой f, модулирующей первую несущую и масштабной частотой f, модулирующей последнюю m-ую несущую радиоволны, при этом относительную дальность определяют по формуле:
. с Д р
360° m f где с - скорость света.
Способ осуществляется следующим образом.
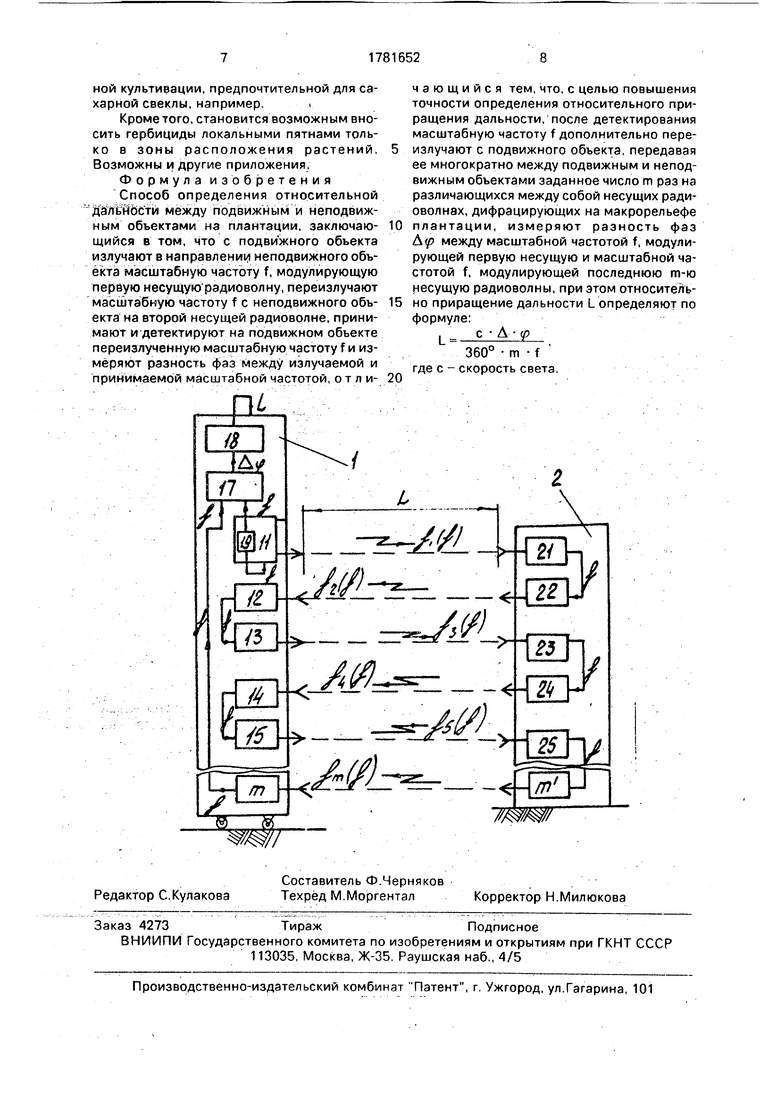
,На чертеже изображена схема многократного переизлучения масштабной частоты f на различающихся несущих частотах f 1, f2, f3,...fm между подвижным и неподвижным объектами.
Условные обозначения на фиг.: 11 - передатчик, 12 - приемник, 13 - передатчик, 14 - приемник, 15 - передатчик, 17 - фазометр, 18 - вычислительное устройство, 19 - генератор масштабной частоты, 21 - приемник, 22 - передатчик, 23 - приемник, 24 - передатчик, 25 - приемник, т - передатчик, m - приемник.
При положении объектов - подвижного
1 и неподвижного 2 - в тени макрорельефа плантации они находятся в пределах видимости только на дифракцирующих радиоволнах, которые огибают местные неровности макрорельефа.
0 Для измерения относительной дальности L между такими объектами на плантации с подвижного объекта 1 излучают масштабную частоту f на несущей частоте fi, т.е. излучают полосу частоту fi(f), принимают ее
5 на неподвижной объекте 2, детектируют и выделенной масштабной частотой f модулируют несущую частоту h, с помощью которой переизлучают масштабную частоту f из неподвижного объекта 2, т е. излучают поло0 су частот f2(f), и принимают ее на подвижном объекте 1, детектируют и выделенной масштабной частотой f модулируют несущую частоту масштабную частоту f дополнительно еще и из подвижного объекта 1,
5 повторяя описанные челночные передачи многократно - заданное число m раз Последнюю несущую частоту fm модулированную масштабной частотой f, т.е полосу частот fm(f), принимают на подвижном объ0 екте 1, детектируют и выделенную масштабную частоту f направляют в фазометр 17, куда также направляют и ту масштабную частоту f, которой модулируют несущую частоту fi.
5 Измеренную фазометром 17 разницу фаз направляют в вычислительное устройство 18 (бортовую ЭВМ), с помощью которой определяют (с заданным тактом, например, через каждые 0,2 с относитель0 ную дальность L между объектами 1 и 2 по формуле:
L с Д р
360° m f
Точность определения относительной дальности между объектами 1 и 2 по предлагаемому способу в первом приближении во столько раз больше известного, во сколько число m пробегов масштабной частоты между объектами. 1 и 2 больше двух.
Многозначность отсчета (при необходимости) разрешают известным по радиодаль- номерным измерениям способу.
Устройство для осуществления способа содержит фрагменты, установленные на по- 5 движном 1 и неподвижном 2 объектах.
На подвижном объекте 1 установлены:
11 - передатчик для полосы частот f i(f) с генератором масштабной частоты f;
5
0
12- приемник для полосы частот h(f) с детектором масштабной частоты f;
13- передатчик для полб сы частот faff);
14- приемник для полосы частот (f) с детектором масштабной частоты f;
15- передатчик для полосы частот fg(f), и так далее до т;
т - конечный приемник для полосы частот fm(f) с детектором масштабной частоты f, а также фазометр 17 и вычислительное устройство 18 (бортовая ЭВМ).
При этом выход каждого приемника соединен со входом следующего по номеру передатчика (т.е. с передатчиком i + 1), кроме последнего m-ого приемника, выход которого соединен с фазометром 17. С другим входом этого фазометра соединен генератор 19 масштабной частоты f, имеющийся в конструкции передатчика 11. а выход фазометра соединен со входом вычислительного устройства 18 (бортовой ЭВМ).
На неподвижном объекте 2 установлены:
21- приемник для полосы частот fi(f) с детектором масштабной частоты f;
22- передатчик для полосы частот f2(f):
23- приемник для полосы частот тз(т) с детектором масштабной частоты f;
24- передатчик для полосы частот );
25- приемник для полосы частот fs(f) с детектором масштабной частоты f и так далее до т ;
т - передатчик для полосы частот.
При этом выход каждого приемника также соединен со входом следующего по номеру передатчика.
Работает устройство следующим образом.
На подвижном объекте 1, например, свекловичной сеялке, сошники которой оборудованы клапанами выхода семян, открываемыми выходными сигналами устройства определения относительного расстояния L между подвижным 1 и неподвижным 2 объектами, последний из которых установлен в начале гона, вырабатывают масштабную частоту f, модулируют ею несущую частоту f 1 передатчика 11 и излучают полосу частот fi(f) в направлении неподвижного объекта 2.
На неподвижном объекте 2 приемником 21 принимают полосу частот fi(f) детектируют масштабную частоту f и модулируют ею несущую частоту fa передатчика 22, который излучает полосу частот f2(f) в направлении подвижного объекта 1.
На подвижном объекте 1 приемником 12 принимают полосу частот f2(f). детектируют масштабную частоту f и модулируют ею несущую частоту fa передатчика 13. которым с подвижного объекта 1 дополнительно переизлучают масштабную частоту f в направлении неподвижного объекта 2, излучая полосу частот fa(f).
И так масштабную частоту f передают
многократно челноком между подвижным и неподвижным объектами последовательно через все радиопередатчики и приемники подвижного 1 и неподвижного 2 объектов
каждый раз на новой несущей частоте.
С выхода последнего m-ого приемника подвижного объекта 1 масштабная частота f поступает на один из двух входов фазометра 17, на другой вход которого поступает
масштабная частота f непосредственно с генератора 19 масштабной частоты, входящего в конструкцию передатчика 11.
Измеренная фазометром 17 разница фаз Лу масштабной частоты в виде напряжения поступает на вход вычислительного устройства 18 (бортовой ЭВМ) в котором по приведенной выше формуле определятся относительная дальность L между подвижным 1 неподвижным 2 объектами и через
заданный шаг приращения длины L вырабатывается управляющий сигнал открытия расположенных в сошниках сеялки клапанов выхода семян. Если же подвижным объектом является не сеялка, а другая
сельхозмашина, то управляющий сигнал подают на исполнительный механизм срабатывания соответствующего рабочего органа.
Положительный эффект от применения
заявляемого способа заключается в повышении (хоть на порядок) точности определе- ния радиоволнами относительной дальности между подвижным и неподвижным объектами вне прямой видимости до
такого порога точности, когда количество переходит в качество. В частности, становится возможным осуществить такие технологические операции в полеводстве, реализация которых возможна только при
достижении определенного порога точности измерения радиоволнами относительной дальности вне прямой видимости, а конкретно с точностью до 1,0...2,0 см на 1,0...2,0 км длины рядка пропашной культуры, например, сахарной свеклы.
Это позволяет, например, при посеве размещать семена пропашных культур с заданным шагом вдоль рядка без смещения в смежных проходах сеялки. Затем при обработке можно вырезать сорняки внутри рядка между растениями как поперечной культивацией (приемлемой, например, для кукурузы), так и путем автоматического поперечного смещения ножей при вдоль рядной культивации, предпочтительной для сахарной свеклы, например..
Кроме того, становится возможным вносить гербициды локальными пятнами только в зоны расположения растений. Возможны и другие приложения. Формула изобретения Способ определения относительной дальности между подвижным и неподвижным объектами на плантации, заключающийся в том, что с подвижного объекта излучают в направлении неподвижного объекта масштабную частоту f, модулирующую первую несущую радио вол ну, переизлучают масштабную частоту f с неподвижного объекта на второй несущей радиоволне, принимают и детектируют на подвижном объекте переизлученную масштабную частоту f и измеряют разность фаз между излучаемой и принимаемой масштабной частотой, отличающийся тем, что, с целью повышения точности определения относительного приращения дальности, после детектирования масштабную частоту f дополнительно переизлучают с подвижного объекта, передавая ее многократно между подвижным и неподвижным объектами заданное число m раз на различающихся между собой несущих радиоволнах, дифрацирующих на макрорельефе
плантации, измеряют разность фаз Дуэ между масштабной частотой f, модулирующей первую несущую и масштабной частотой f, модулирующей последнюю т-ю несущую радиоволны, при этом относительно приращение дальности L определяют по формуле:
с А р
I
360° m f где с - скорость света,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения дальности при автовождении машинно-тракторного агрегата | 1991 |
|
SU1793833A3 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2009 |
|
RU2426145C2 |
| СПОСОБ УВЕЛИЧЕНИЯ ДАЛЬНОСТИ СИСТЕМЫ МНОГОАБОНЕНТНОЙ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ | 2016 |
|
RU2594333C1 |
| Способ определения скорости радиоволн, распространяющихся земным лучом | 1988 |
|
SU1663591A1 |
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОГРЕБЕННЫХ ПОД ОБШИРНЫМИ ЗАВАЛАМИ ЛЮДЕЙ | 2007 |
|
RU2379703C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2439607C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
Сущность способа заключается в том, что масштабную частоту многократно (т раз) пере- излучают с подвижного объекта на неподвижный и обратно и производят измерение разности фаз масштабной частоты, излучаемой на первом и последнем цикле переизлуче ния. При этом повышение точности достигается за счет повышения в m раз крутизны фазовой характеристики измерителя. 1 ил.
| Inter | |||
| I, Electronics, 1975 вып 39 № 5, с | |||
| Рабочее колесо паровой турбины | 1922 |
|
SU551A1 |
