Изобретение относится к эксплуатации судов.
Традиционный расчетный метод определения остойчивости, основанный на составлении и проверке -грузового плана путем расчета моментов инерции азмбЩа- емых на борту грузов, неточен из-за больших погрешностей в определении масс и координат центров тяжести принятых грузов, запасов и балласта, особенно разнородных по своему составу.
В настоящее время существуют прямые методы определения остойчивости судна, основанные на вычислении его начаЯь ной метацентрической высоты по непосредственно измеряемым параметрам, от котбрых она зависит, например способ и его модификации, основанные на искусственном креновании судна путем приема в креновые цистерны заборной воды или перемещении на один из бортов грузов, масса которых
известна точно, измерении разности углов крена до и после кренования и вычислении начальной метацентрической высоты по известной формуле.
Известен также способ основанный на измерении периода собственных колебаний судна с помощью прецизионного гироскопа с маятниковой коррекцией, включенного в электрическую схему между обмотками электрического генератора, после чего по известной формуле вычисляется начальная метацентрическая высота.
Недостатком данного способа, как и предыдущих, является то, что он не позволяет производить контроль остойчивости судна дистанционно без использования оперативных данных о значении тех или иных параметров, необходимых для расчета начальной метацентрической высоты и получаемых от лиц судовой команды, которые могут оказаться необъективными Таким обXf00 N5 00
ON СА)
разом, данный способ недостаточно достоверен.
Цель изобретения - повышение достоверности данных об остойчивости судна, путем обеспечения дистанционного ее контроля.
Поставленная цель достигается в частности, за счет измерения параметров свободной бортовой качки с помощью излучения электромагнитных волн перпендикулярно диаметральной плоскости судна, частотного детектирования принятых отраженных сигналов и измерения частоты их модуляции.
Сущность изобретения состоит в следующем. Период свободной бортовой качки Тб при слабом волнении связан с начальной метацентрической высотой Нм соотношением
HM (CB/T6f,(1)
где С - известный числовой коэффициент, зависящий от типа и водоизмещения судна;
В - ширина ватерлинии в районе ми- дельшпангоута.
С другой стороны, он может быть найден локационными методами: положение судна, колеблющегося с борта на борт, может быть описано мгновенным значением его угла крена се.
a(t) OmSin(Q- t+p),
(2)
где От - амплитуда бортовой качки;
Q- ее круговая частота;
р- начальная фаза качки.
Из выражения (2) по формуле Эйлера
v(t) a(t).LBp.
где вр - расстояние от колеблющейся точки QT оси вращения (штрих означает производную по времени),
находят линейную скорость перемещения элементов настроек и мачт судна: ,
v(t) От Up И -cos( и t + 0 (3)
С учетом формулы, связывающей скорость перемещения объекта со сдвигом допле- ровской частоты Рд отраженного от него радиолокационного сигнала,
с - 2vr ,
где vr - радиальная составляющая скорости перемещения объекта;
с - скорость света в воздухе;
fH - несущая частота зондирующего сигнала.
Из выражения (3) получают
2 От LBp fH Q
cos(Qt )
(4)
Таким образом, в результате качки судна доплеровская частота отраженных от него зондирующих сигналов РЛС приобретает гармоническую зависимость от времени с
частотой, совпадающей с частотой качки.
Помимо бортовой качки судно испытывает также килевую, которая ввиду большого сопротивления воды имеет преимущественно характер вынужденных
0 колебаний с частотой, определяемой состоянием морской поверхности. Суммарные колебания судна при произвольном ракурсе его колебаний представляют собой суперпозицию обоих колебаний. Однако, если ло5 цировать его в борт, килевая качка не внесет вклада в доплеровский спектр отраженного радиолокационного сигнала, и можно применять формулу (4). Для этого необходимо размещать радиолокатор на тра0 верее проходящих судов.
В итоге несущая частота зондирующих сигналов РЛС, отраженных от качающегося перпендикулярно лучу судна, оказывается промоделирована доплеровской частотой,
5 изменяющейся по гармоническому закону (4). Для выделения частоты бортовой качки необходимо выполнить частотную демодуляцию принятого сигнала и измерить частоту модуляции, связанную с периодом качки
0 по формуле
In
тг
Затем с помощью соотношения (1) определяется начальная метацентрическая высота
5 судна Нм. которая сравнивается с заданным порогом.
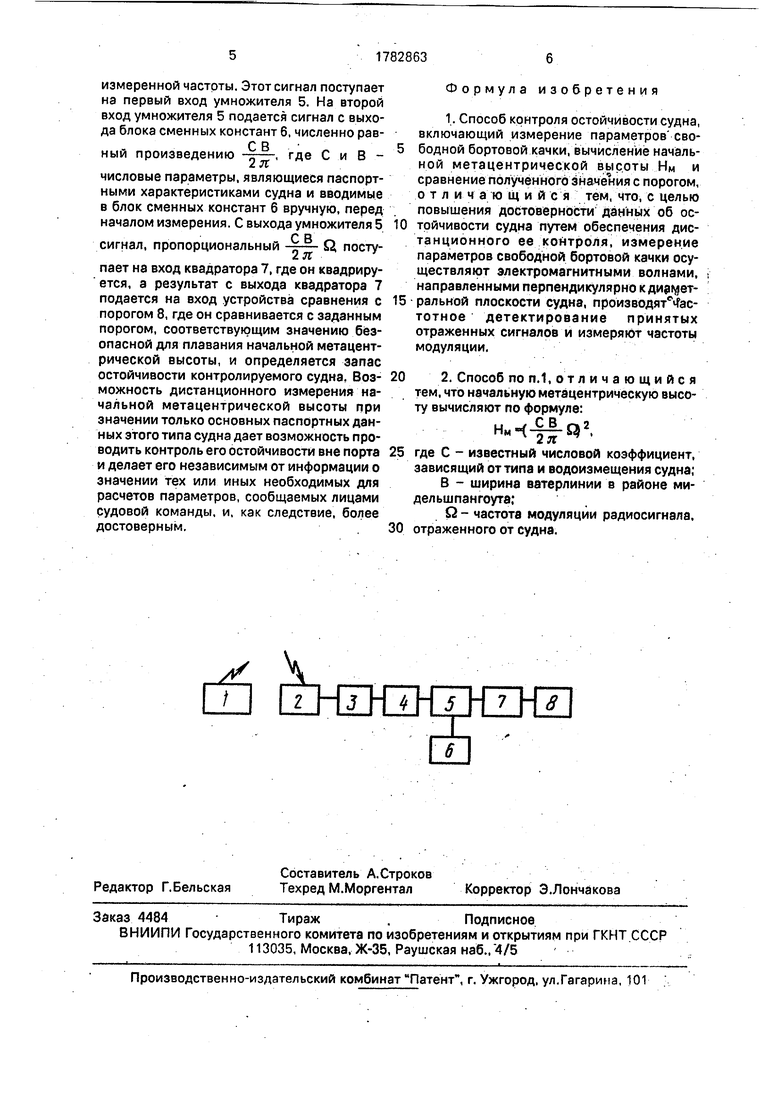
Пример технической реализации предложенного способа приведен на чертеже: 1 - передатчик; 2 - приемник; 3 - частотный
0 демодулятор; 4 - измеритель частоты; 5 - умножитель; 6 - блок сменных констант; 7 - квадратор; 8 - устройство сравнения с nopoj гом.х
Радиолокационный сигнал излучается
5 на несущей частоте f передатчиком 1 в направлении, перпендикулярном диаметральной плоскости судна, и после отражения от последнего принимается приемником 2. С выхода приемника сигнал поступает на вход
0 частотного демодулятора 3, где происходит выделение частотной огибающей принятого радиолокационного сигнала, которой тот оказался промодулирован при отражении от судна в результате качки последнего. С
5 выхода частотного демодулятора 3 сигнал с несущей частотой, равной частоте модуляции О, поступает на вход измерителя частоты 4, с выхода которого снимается сигнал, пропорциональный численному значению
Тб
измеренной частоты. Этот сигнал поступает на первый вход умножителя 5. На второй вход умножителя 5 подается сигнал с выхода блока сменных констант 6, численно равС В произведению „ „. . где С и В ный
2л
числовые параметры, являющиеся паспортными характеристиками судна и вводимые в блок сменных констант 6 вручную, перед началом измерения. С выхода умножителя 5
С В сигнал, пропорциональный -- О, постуЈ. Уь
пает на вход квадратора 7, где он квадриру- ется, а результат с выхода квадратора 7 подается на вход устройства сравнения с порогом 8, где он сравнивается с заданным порогом, соответствующим значению безопасной для плавания начальной мета центрической высоты, и определяется запас остойчивости контролируемого судна. Воз- можность дистанционного измерения начальной метацентрической высоты при значении только основных паспортных данных этого типа судна дает возможность проводить контроль его остойчивости вне порта и делает его независимым от информации о значении тех или иных необходимых для расчетов параметров, сообщаемых лицами судовой команды, и, как следствие, более достоверным.
Формула изобретения
1.Способ контроля остойчивости судна, включающий измерение параметров свободной бортовой качки, вычисление начальной метацентрической высоты Нм и сравнение полученного значения с порогом, отличающийся тем, что, с целью повышения достоверности данных об остойчивости судна путем обеспечения дистанционного ее контроля, измерение параметров свободной бортовой качки осуществляют электромагнитными волнами, направленными перпендикулярно к ральной плоскости судна, производят ас- тотное детектирование принятых отраженных сигналов и измеряют частоты модуляции.
2.Способ по п.1,отличающийся тем, что начальную метацентрическую высоту вычисляют по формуле:
СВ 2
Нм-КЧп
Р:
где С - известный числовой коэффициент, зависящий от типа и водоизмещения судна; В - ширина ватерлинии в районе ми- дел ьш пан гоута;
Q - частота модуляции радиосигнала, отраженного от судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| СПОСОБ УМЕРЕНИЯ БОРТОВОЙ КАЧКИ СУДНА ПОСРЕДСТВОМ ПАССИВНОГО УСПОКОИТЕЛЯ БОРТОВОЙ КАЧКИ И ПАССИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2013 |
|
RU2529244C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| УСТРОЙСТВО ДЛЯ УМЕРЕНИЯ БОРТОВОЙ КАЧКИ МОРСКИХ СУДОВ С БОЛЬШОЙ ПОПЕРЕЧНОЙ ОСТОЙЧИВОСТЬЮ | 2006 |
|
RU2374124C2 |
| СПОСОБ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ОСТОЙЧИВОСТИ | 1973 |
|
SU373205A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |
| КОРАБЛЬ, ОСТОЙЧИВЫЙ В ШТОРМОВОМ ПЛАВАНИИ | 2011 |
|
RU2487043C2 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
Использование: эксплуатация судов. Сущность изобретения: способ контроля остойчивости судна включает в себя измерение параметров свободной бортовой качки, вычисление метацентрической высоты Нм и сравнение полученного значения с порогом. Измерение параметров свободной бортовой качки осуществляют электромагнитными волнами, направленными перпендикулярно диаметральной плоскости судна. Далее производят частотное детектирование принятых отраженных сигналов и измеряют частоту модуляции. Начальную метацентрическую высоту вычисляют по формуле Нм ( С В/ 2 л Q)2, где С - известный числовой коэффициент, зависящий от типа и водоизмещения судна; В - ширина ватерлинии в районе мидельш- пангоута; Q- частота модуляции радиосигнала, отраженного от судна. 1 з.п. ф-лы, 1 ил. ё
| Найденов Е.В | |||
| Контроль посадки и остойчивости судна | |||
| М.: Транспорт, 1983 | |||
| Куров Б.Н., Семенов Л.А | |||
| Автоматизированная система контроля посадки и остойчивости судна | |||
| Судостроение, 1987, №3 | |||
| Патент США № 3982424, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
