Изобретение относится к судостроению, в частности к способам контроля мореходных качеств судов в условиях эксплуатации, и может быть использовано при создании экспертных систем безопасности мореплавания.
Известен способ контроля мореходности судна [1], основанный на измерении периода бортовой качки, осадки носом и кормой "кажущегося" периода волны, курсового угла и скорости судна на нерегулярном волнении и определении расчетом метацентрической высоты, в котором дополнительно измеряют угловое перемещение судна относительно поперечной и вертикальной осей, а также линейные и угловые ускорения относительно продольной, поперечной и вертикальной центральных осей.
Техническим результатом способа является расширение функциональных возможностей и повышение достоверности оценки мореходных качеств судов, что достигается посредством устройства, содержащего датчики курсового угла и скорости судна, значения которых вводят в ЭВМ с помощью дисплея, датчики осадок судна носом и кормой, датчики угловых перемещений при колебательном движении судна относительно продольной, поперечной и вертикальной осей, датчик ускорений всех видов качки судна на волнении, сигналы от которых через блок коммутации и предварительной обработки информации поступают для дальнейшей обработки в специализированные процессоры: процессор классификатор, позволяющий анализировать измеряемые сигналы с целью установления их статистических характеристик, проверки свойства стационарности, идентификации их распределений и оценки спектральных плотностей, процессор-редактор, осуществляющий редактирование выбросов и масштабирование измеряемых сигналов, и метрологический процессор, выполняющий периодическую самопроверку, самокалибровку и коррекцию измерений, интеллектуальный процессор быстродействующей ЭВМ, управляющий базой данных и базой знаний экспертной системы и обеспечивающий также интерфейс с пользователем через цветной графический дисплей, вывод результатов на печать и взаимодействие между специализированными процессорами.
В соответствии с описанием [1] способ осуществляется следующим образом. Измеряют курсовой угол волны, скорость судна, кажущийся период волны, осадки носом и кормой и одновременно производят регистрацию угловых перемещений относительно продольной поперечной и вертикальной центральных осей, а также линейных и угловых ускорений всех видов колебательного движения судна на волнении как динамической системы с шестью степенями свободы. По данным измерений устанавливают водоизмещение, фактическую метацентрическую высоту и соответствующую аппликату центра тяжести, производят оценку остойчивости, для чего вычисляют спектральную плотность и параметры морского волнения, дисперсии и среднюю частоту относительных колебаний волнового уровня относительно корпуса судна, дисперсию и среднюю частоту колебаний минимального погружения гребного винта, дисперсию рыскания, дисперсии проекций полного вектора ускорений при колебательном движении судна на волнении и производят оценку показателей, характеризующих мореходные качества судна, такие как, вероятности заливания и среднего числа погружений палубы под поверхность воды за единицу времени, вероятности слеминга и среднего числа ударов за единицу времени, вероятности оголения лопастей гребного винта и среднего числа оголений за единицу времени, амплитуды рыскания, суммарные ускорения, действующие при качке судна на волнении.
Сравнительный анализ структурного состава измерительных датчиков и операций для его осуществления показывает, что известный способ не обеспечивает измерение указанных параметров, таких как, "кажущий" период волны, курсовой угол волны, а позволяет определить их только косвенным путем по аналитическим зависимостям в соответствии с измеренными параметрами периода бортовой качки, осадки носом и кормой и скорости судна, а также с учетом известной зависимости метацентрической высоты от площади действующей ватерлинии.
Кроме того, при контроле мореходности судна, одним из важных аспектов является процесс определения и оценки потери скорости судна на волнении. Так, например, при равенстве длины попутной волны и судна может возникнуть угроза значительной потери его остойчивости (см., например: Управление судном и его техническая эксплуатация. Под ред. Щетининой А.И. М., Транспорт, 1983, с.). Большинство современных транспортных судов имеет прямостенные борта в средней своей части и острые обводы в носовой и кормовой оконечностях, поэтому при плавании на волнении происходит непрерывное изменение действующей ватерлинии, а следовательно, и остойчивости судна. Если при встречном волнении эти изменения происходят достаточно быстро, то при попутной волне, особенно если ее скорость близка к скорости судна, изменение площади действующей ватерлинии может наблюдаться в течение длительного времени. Снижение остойчивости может в таких случаях достигнуть опасных значений и явиться причиной опрокидывания и гибели судна.
При использовании известного способа, задача определения потери скорости судна на волнении может быть решена путем выполнения вычислений в соответствии с известным аналитическим выражением зависимости потери скорости судна от волнения (см. например: - Лесков М.М., Баранов Ю.К., Гаврюк М.И. Навигация. М., Транспорт, 1986, с.343-347 ), которое имеет вид: ΔV=ah+bh-chq, где h - высота волны, q - курсовой угол волны, а, b, с - коэффициенты, зависящие от типа судна, или по формуле расчета потери скорости: ΔV=Vл-V=h(0,745-0,259qв)(1-1,35·10-6 DVл), где h - высота волны, D - фактическое водоизмещение судна, Vл - скорость судна по лагу, qв - курсовой угол волны При этом высота волны определяется из визуальных наблюдений или вычисляется по эмпирической формуле: h=0.2286W2/3+1,524, где W - скорость ветра.
Существенным препятствием использования известного способа является необходимость определения количественных параметров волнения, которые при использовании известного способа могут быть определены только косвенным путем, что снижает достоверность получения объективных оценок контроля мореходности судна. Кроме того, известный способ может быть использован только в районах с постоянным течением. Так как в противном случае, в районах, где постоянные и приливоотливные течения имеют значительные скорости и одновременно в формировании суммарного течения при наличии ветра, существенную роль играет ветровая составляющая, которая может привести к существенным ошибкам как в определении счислимых, так и счислимо-обсервованных местах судна, что может негативно сказаться на конечных результатах оценки мореходности судна.
Задачей заявляемого технического решения является повышение достоверности получения объективных оценок контроля мореходности судна.
Поставленная задача решается за счет того, что в способе контроля мореходности судна, основанном на измерении периода бортовой качки, осадки носом и кормой, периода волны, курсового угла и скорости судна на нерегулярном волнении, определении метацентрической высоты и измерения углового перемещения судна относительно поперечной и вертикальной осей, линейных и угловых ускорений относительно продольной, поперечной и вертикальной центральных осей, дополнительно измеряют истинные высоты волн и курсовые углы прихода волн относительно диаметральной плоскости судна и определяют скорость и курсовой угол течения и величину потери скорости судна от ветра и волнения.
При этом, в устройство для осуществления способа, содержащее датчик курсового угла, датчик скорости, блоки датчиков осадки судна носом и кормой, блок датчиков угловых перемещений колебательного движения судна относительно продольной, поперечной и вертикальной осей, блок датчиков ускорений судна на волнении, соединенные с блоком коммутации и предварительной обработки информации, соединенный с процессором классификатором, процессором редактором, метрологическим процессором, которые соединены с интеллектуальным процессором, образующих ЭВМ, соединенной посредством интеллектуального процессора с дисплеем, системой документирования и экспертной системой, дополнительно введен радиовысотомер малых высот, соединенный своим выходом с ЭВМ, которая еще соединена с выходами датчика курсового угла и датчика скорости, а также выходами приемоиндикатора спутниковой навигационной системы и измерителя параметров ветра.
В отличие от известного способа контроля мореходности судна, в заявляемом способе обеспечивается решение инструментального измерения высоты волн и угла прихода волн относительно диаметральной плоскости судна, посредством радиовысотомера малых высот, с одновременным определением скорости и курсового угла течения и ввода в ЭВМ навигационных параметров от спутниковой навигационной системы и измерителя параметров волнения, что позволяет оценить потерю скорости судна от ветра и волнения, что существенно повышает достоверность объективного контроля мореходности судна.
Новые признаки заявляемого технического решения, заключающиеся в измерении истинной высоты волн и углов прихода волн относительно диаметральной плоскости судна, определении скорости и курсового угла течения и величины потери скорости судна от ветра и волнения из известного уровня техники, не выявлены, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Сущность заявляемого технического решения поясняется чертежом, приведенным на фиг.1.
Фиг.1. Блок-схема устройства для осуществления способа. Устройство включает блок датчиков осадки судна носом 1, блок датчиков осадки судна кормой, датчик курсового угла 3, датчик скорости 4, блок датчиков угловых перемещений 5, блок коммутации и предварительной обработки информации 6, блок датчиков ускорений 7, процессор классификатор 9, процессор редактор 10, метрологический процессор 11, интеллектуальный процессор 12, образующие ЭВМ 8, экспертную систему 13, включающую базу данных 14 и базу знаний 15, графический дисплей 16, систему документирования 17, радиовысотомер малых высот 18.
Способ контроля мореходности судна осуществляется следующим образом. Посредством датчиков курсового угла 3 и скорости 4 измеряют соответственно курс Кс и скорость судна Vл. Посредством блоков датчиков 1, 2, 5, 6, 7 измеряют значения осадки носом и кормой и синхронно производят регистрацию угловых перемещений относительно продольной, поперечной и вертикальной центральных осей, а также линейных и угловых ускорений всех видов колебательного движения судна на волнении как динамической системы с шестью степенями свободы. Одновременно с этими замерами посредством высотомера малых высот 18 производят измерение высоты волн и угол прихода волн относительно диаметральной плоскости судна. По данным измерений устанавливают водоизмещение, фактическую метацентрическую высоту и соответствующую аппликату центра тяжести, производят оценку остойчивости, для чего вычисляют спектральную плотность S(ω) и параметры морского волнения, дисперсии Dq и среднюю частоту ωq относительных колебаний волнового уровня относительно корпуса судна, дисперсию Dzв и среднюю частоту ωz колебаний минимального погружения гребного винта, дисперсию рыскания Dx, дисперсии Dx, Dy, Dz проекций полного вектора ускорений при колебательном движении судна на волнении и производят оценку показателей, характеризующих мореходные качества судна:
1. Вероятности заливания Рз и среднего числа N погружений палубы под поверхность волны за единицу времени Тc
Pз=exp[-(F)/2Dq]N(l/2π)ωqPз, где F - расчетная высота надводного борта.
2. Вероятности слеминга Ро и среднего числа ударов Nуд за время То Pc=exp{-[(T1/2Dq)+0,0087gL/2D<IMG SRC ="http://www.fips.ru/fullimg/rupat1/19953/006.dwl/2040429-4t.gif''ALIGN=ABSMIDDLE>]Nуд=(1/2π)ωqТоРс}, где T1 - расчетная осадка в зоне удара; g - ускорение свободного падения; L - длина судна.
3. Вероятности оголения лопастей гребного винта Рог и среднего числа оголении Nог за время То
Рогexp{-0,5[(Ho-R)/(Dzв)]}; Nor=[1/2π)]ωzTo-R)/(Dzв)]Pог, где Но - погружение оси винта; R - радиус винта.
4. Амплитуды рыскания: Х3% 2,64(Dx).
5. Суммарных ускорений, действующих при качке судна на волнении U1=(Dx+Dy+Dz), U2=(Dx+Dy).
6. Потери скорости судна от ветра и волнения.
ΔVu=f(u, gu, Su); ΔVh=f(h, qh, Sh), где ΔVu и ΔVh - ветровая и волновая составляющие потерь скорости судна; u - скорость ветра; qu - курсовой угол ветра; h - параметры волны; qu - курсовой угол волнения; Su и Sh - основные размерения надводной и подводной частей судна.
6.1. При однородных курсовых углах ветра и ветрового волнения, а также неизменной частоте вращения винтов, ветроволновые потери скорости определяются в соответствии с зависимостью ΔV=ah6, где h - высота волны, м.
6.2. При увеличении скорости ветра при неизменной высоте и курсовом угле волны, а также постоянной частоте вращения винтов, потери скорости судна определяются в соответствии с логарифмической зависимостью: ΔV=algu-b, где u - скорость ветра, м/с.
6.3. Изменение скорости судна в зависимости от курсового угла ветра и волнения определяется тригонометрическим рядом:
ΔVq=ΔVoa+bcosqh+ccos2qh+dcos3qh+ecos4qh, где ΔVo - потеря скорости при курсовом угле О; q - курсовой угол волны; a, b, c, d, е - эмпирические параметры, характеризующие ветроволновые условия и тактико-технические данные судна.
6.4. При наличии явлений слеминга, заливаемости, резонансной качки дополнительное снижение скорости определяется в соответствии с зависимостью: ΔVb=ΔN[ah-6 exp(ch)], где ΔN - изменение частоты вращения винтов, об/мин; h - высота волны, м; а и с - эмпирические коэффициенты, определяющие основные размерения судна.
6.5. Суммарные ветровые потери скорости судна определяются как:
ΔVс=ΔVuhb=ΔVu+ΔVh+kbΔVb.
6.6. Суммарные ветроволновые потери скорости с учетом водоизмещения, высоты и курсового волнения определяются в соответствии с зависимостью:
Vuh=Vo-(0,74h-025hqh)(1-135·10-6 DbVo), Vuh - скорость судна при ветре и волнении, уз; Vo - скорость на тихой воде, уз; h - высота волны, м; qh - курсовой угол волны, рад; Db - весовое водоизмещение, т.
Алгоритмы п.п.6.1-6.6 используются при условии, что определенной скорости ветра соответствует определенная высота волны, а направление ветра и волнения совпадают.
6.7. При плавании на смешанном волнении или зыби определение потери скорости судна от ветра и волнения осуществляется в сооветствии со следующими выражениями.
Ветровая составляющая потери скорости хода:
где Vo - скорость судна на тихой воде, м/с;
u - скорость истинного ветра, м/с;
qu - курсовой угол истинного ветра, град;
kq - ветровой коэффициент ветра.
Волновая составляющая потерь скорости судна:
ΔVh=[A2(ρh)C2+2ρh2C(c cosqh+Vo)]-Aρh2B,
A=3,06·10-3 δLB/D; С=1-ехр -4πТ/λ,
δ - коэффициент общей полноты,
L - длина судна, м;
В - ширина судна, м;
Т - осадка судна, м;
D - водоизмещение, т;
h - средняя высота волн, м;
λ - наиболее вероятная длина волны, соответствующая высоте волны этой обеспеченности, м;
qh - курсовой угол волны, град;
ρ - плотность морской воды, г/м;
с - фазовая скорость волн, м/с.
Ветроволновая потеря скорости судна:
ΔVuh=1,94(ΔVu+ΔVh).
6.8. Определяют абсолютную скорость судна:
 где Vo=Vт/Vл-ΔVuh - относительная скорость течения при наличии ветра и волнения,
где Vo=Vт/Vл-ΔVuh - относительная скорость течения при наличии ветра и волнения,
 - скорость течения,
- скорость течения,
Vw=ΔVux1/|cos kw-kk| - скорость ветрового движения поверхностной пленки водной поверхности,
ΔVux=|ΔVxiд-Vxia|-Vт - изменение скорости ветрового поверхностного течения вдоль диаметральной плоскости судна,
kw - направление ветра,
kk - курс судна,
n - число замеров,
Vхл - скорость по лагу,
Vxa - скорость по спутниковой навигационной системе,
Vхд - доплеровская скорость от радиовысотомера.
Описание процедуры обработки данных измерений выполняются с помощью спецпроцессоров и быстродействующей персональной ЭВМ и реализуется в экспертной системе, позволяющей осуществлять оценку мореходных качеств судна на основе действующих критериев и принимать обоснованные решения по обеспечению безопасности эксплуатации судна.
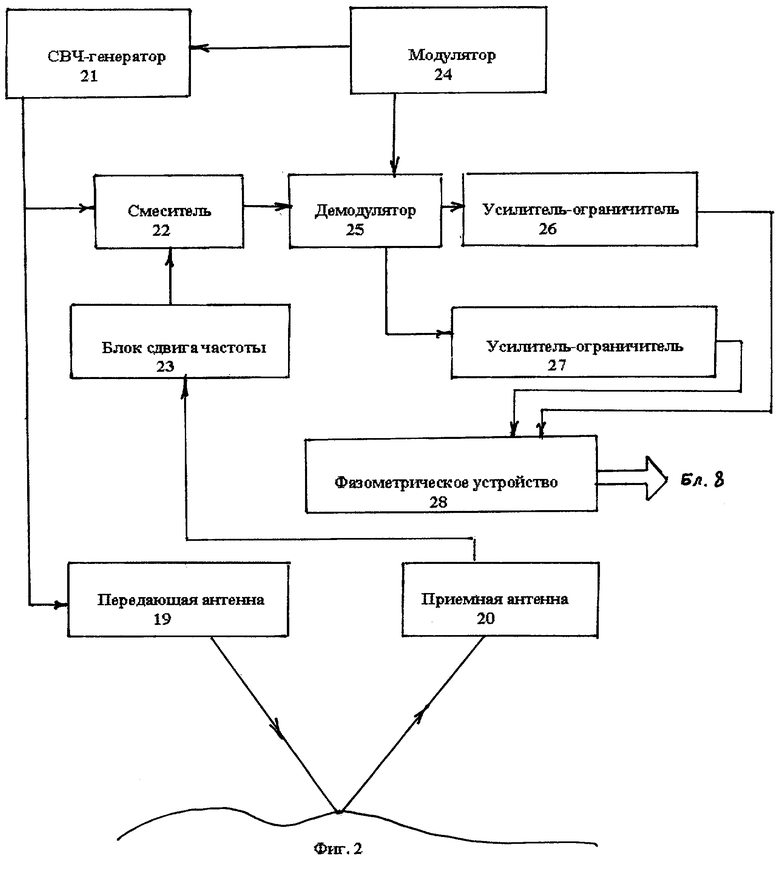
Радиовысотомер малых высот 18 (фиг.2) состоит из передающей 19 и приемной антенн 20, СВЧ-генератора 21, смесителя 22, блока сдвига частоты 23, модулятора 24, демодулятора 25, усилителей-ограничителей 26 и 27, фазометрического устройства 28.
Радиовысотомер 18 посредством передающей антенны 19 излучает поочередно СВЧ сигналы двух близких частот. Отраженные от подстилающей поверхности сигналы принимаются приемной антенной 20 и имеют вид:
U1=Vcos[(ω1+ωD)t-k1h-θо]=Vcosθ1,
U2=Vcos[(ω2+ωD)t-k2h-θо]=Vcosθ2,
ω1, ω2 - излучаемые частоты,
ωD - частота Доплера,
h - измеряемая высота,
θо - начальная фаза,
k1=2π/λ1, k2=2π/λ2 - волновые числа,
Разность фаз Δθ=θ1-θ2=(k1-k2)h измеряется на частоте Доплера ωD, что позволяет и измерять скорость Vxд относительно подстилающей поверхности по доплеровскому сдвигу частот.
Измеренные значения высот hi поступают на ЭВМ, где происходит сглаживание значений текущей высоты оценками вертикальной скорости перемещения судна, а также производится вычисление оценки средней квадратической погрешности и высоты волны 3% обеспеченности:
- подсчет интервала времени ΔТN для целого числа N периодов колебаний и вычисление периода волн: Т=ΔТN/N;
- вычисление длины волны λв=2,44(h+1);
- вычисление фазовой скорости морской волны 
- скорость морской волны с=1,25 ;
;
- угол прихода морской волны:
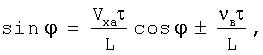 где τ - временной сдвиг профилей волны в точках отражения лучей от морской поверхности; L - расстояние между точками пересечения лучей и морской поверхности.
где τ - временной сдвиг профилей волны в точках отражения лучей от морской поверхности; L - расстояние между точками пересечения лучей и морской поверхности.
В отличие от известного способа, в котором технический результат достигается путем обработки вариаций спектральной плотности волнения, которые сильно зашумлены трехмерным характером волнения, обусловленным наличием углового распределения энергии в двухмерном спектре волнения, что требует глубокого сглаживания этих вариаций по времени, что нежелательно, так как при этом усредняется и угловой спектр волнения, в предлагаемом способе и устройстве для его осуществления основные параметры волнения определяются путем непосредственного их измерения, что позволяет получить более достоверные оценки контроля мореходности судна.
При установке двух и более радиовысотомеров по бортам судна и объединении датчиков линейных и угловых скоростей и ускорений в единую инерциальную навигационную систему обеспечивается более высокая точность измерения параметров волнения и собственных горизонтальных и вертикальных перемещений судна с возможностью восстановления поля волновых возмущений с обоих бортов и выполнения контроля угловых параметров качки и осадки в реальном масштабе времени.
Реализация предлагаемого способа технической трудности не представляет, так как способ реализуется с использованием штатных судовых технических средств навигации, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применимость".
Источники информации.
1. Патент РФ №2040429.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 2013 |
|
RU2518374C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ И СКОРОСТИ СУДНА | 1992 |
|
RU2057678C1 |
Изобретение относится к судостроению, касается технологии контроля мореходности судна и может использоваться при создании экспертных систем безопасности мореплавания. Способ контроля мореходности судна основан на измерении периода бортовой качки, осадки носом и кормой периода волны, курсового угла и скорости судна на нерегулярном волнении, определении метацентрической высоты и измерения углового перемещения судна относительно продольной, поперечной и вертикальной центральных осей. При его реализации дополнительно измеряют истинные высоты волн и курсовые углы прихода волн относительно диаметральной плоскости судна и определяют скорость и курсовой угол течения и величину потери скорости судна от ветра и волнения. Устройство для воплощения способа имеет датчик курсового угла, датчик скорости, блоки датчиков осадки судна носом и кормой, блок датчиков угловых перемещений колебательного движения судна относительно продольной, поперечной и вертикальной осей, блок датчиков ускорений судна на волнении, соединенные с блоком коммутации и предварительной обработки информации, соединенным с процессором-классификатором, процессором-редактором, метрологическим процессором, которые соединены с интеллектуальным процессором. Все эти процессоры образуют ЭВМ, соединенную посредством интеллектуального процессора с дисплеем, системой документирования и экспертной системой. В устройство дополнительно введен радиовысотомер малых высот, соединенный своим выходом с ЭВМ, а она соединена с выходами датчика курсового угла, датчика скорости и с выходами приемоиндикатора спутниковой навигационной системы и измерителя параметров ветра. Технический результат состоит в расширении функциональных возможностей и в повышении достоверности оценки мореходных качеств судов. 2 н.п. ф-лы, 2 ил.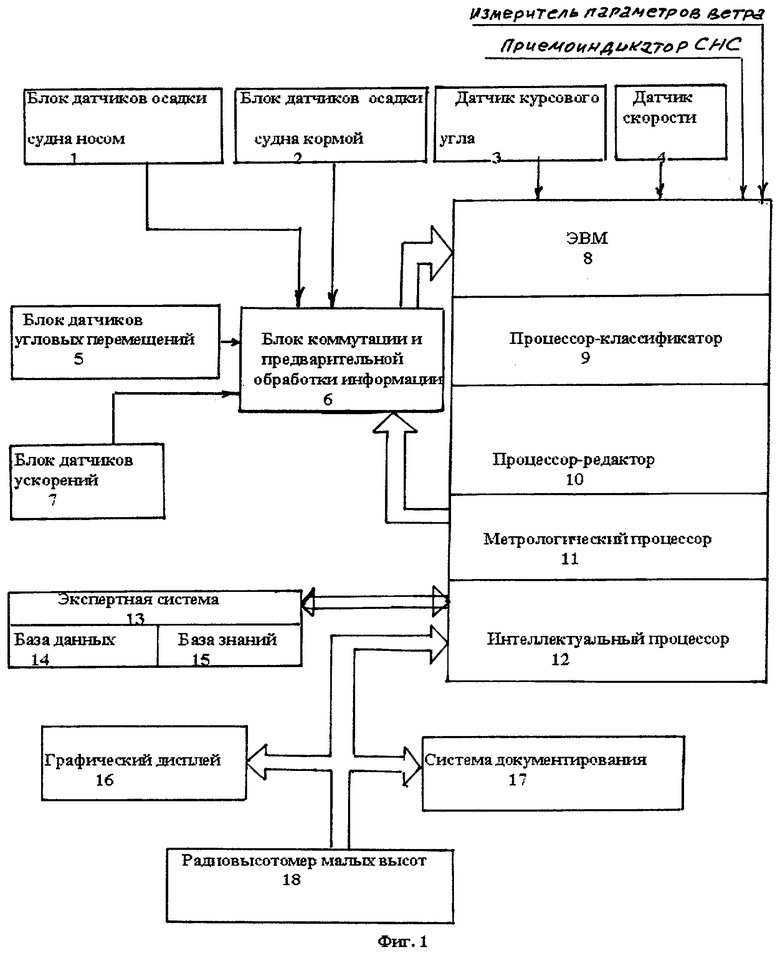
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
| US 3727572 A, 17.04.1973 | |||
| US 2979010 A, 17.09.1956. | |||

