Изобретение относится к области контрольно-измерительной техники, в частности, к установкам (стендам) для градуировки и поверки датчиков средних и пульсационных значений параметров движущихся сред, например, солености температуры, химических примесей и т.п., и предназначено для использования в океанографии, метеорологии, экологических программах по мониторингу окружающей среды.
Известна установка для динамической градуировки датчиков температуры движущихся сред, содержащая гидроканал с электродами на своих стенках, генератор высокочастотного электрического сигнала, регистратор поглощаемой в среде мощности, образцовые средства измерения температуры среды.
Известен способ динамической градуировки датчиком температуры на установке заключающийся в размещении датчика в гидроканале с движущейся средой и нагревании области среды перед датчиком, путем наложения на эту область высокочастотного электрического поля с контролем уровня поглощаемой в среде мощности.
Недостатком этого устройства и способа является низкая точность градуировки датчиков, вызываемая неоднородным нагревом среды в области воздействия высо кочастотного поля из-за т.н. эффекта раскрашивания по температуре на плот- ностных, солевых и прочих неоднороднэ- стях.
Наиболее близка к заявляемой, по общим признакам, установка для динамической градуировки датчиков, которая
принята нами в качестве прототипа и содержит горизонтально установленный гермети- зированный гидроканал, заполняемый рабочей средой, дополнительные емкости для контрольной среды с заданным значением параметра, механизм подачи контрольной среды в канал, механизм перемещения датчика на оси канала, образцовые средства измерений.
Наиболее близок к заявленному способ динамической градуировки датчиков, реализуемый на установке, который принят нами в качестве прототипа и заключающийся в заполнении канала установки рабочей средой, введении в участки канала контрольной среды из .дополнительных емкостей и в перемещении датчика вдоль оси канала, когда по сигналу с датчика судят о его характеристиках.
Недостатком данного способа и устройства является то, что они не обеспечивают точности градуировки датчиков, измеряющих параметры движущихся сред. Это объясняется тем, после впрыскивания контрольной среды с известным значением параметра в рабочую среду канала, перед датчиком создается неопределенность распределения параметра в области среды и неопределенность изменения его в пространстве и во времени. Кроме того, искажение потока перед датчиком не может быть идентифицировано с искажением потока перед образцовым средством измерения не только из-за различия в их формах, но и из-за невозможности их размещения в одной точке рабочей среды.
Цель изобретения в части устройства и способа состоит в повышении точности динамической градуировки датчиков, измеряющих параметры движущихся сред.
Поставленная цель в части устройства достигается тем, что известная установка, содержащая горизонтально установленный герметизированнь-й канал, заполняемый рабочей средой, дополнительные емкости для контрольной с заданным значением параметра, меха изм подачи контрольной среды в канал, механизм перемещения датчика вдоль оси канала, образцовые средства измерений параметров среды, дополнительно содержит в своем канале подвижные перегородки с механизмами их открывания и закрывания, механизм перемешивания рабочей и контрольной с рчд, а механизм перемещения датчика дополнительно снабжен регулируемой муфтой сцепления.
Поставленная цель в части способа достигается тем, что в известном способе динамической градуировки, заключающейся в заполнении канала установки рабочей средой, введении в участки канала контрольной среды из дополнительных емкостей, в перемещении датчика вдоль оси канала, когда по сигналу с датчика судят о его характеристи5 ках, предварительно перемешивают рабочую среду в канале, измеряют начальное значение параметра, устанавливают поперек канала непроницаемые для параметра перегородки, образующие замкнутые сек0 ции канала, рассчитывают соотношение между объемами этих секций и соответствующих им дополнительных емкостей, устанавливают требуемое и равномерно распределенное по объему каждой секции
5 значение параметра, перемещают датчик через секции канала, не допуская выхода его из рабочей среды, причем перегородки между секциями, либо их подвижные части, открывают только на время прохождения
0 через них датчика таким образом, чтобы ширина зоны контрольной среды между секциями не превышала толщины перегородки, либо ее подвижной части, а при малых значениях плотностей контрольной среды, датчик
5 вводят в канал снизу, для чего предварительно переворачиваютустановку на 180°относительно ее горизонтальной оси.
Общими признаками прототипа и предлагаемого устройства является нали0 чие горизонтально установленного герметизированного канала, заполняемого рабочий средой с заданным значением параметра, механизма подачи контрольной среды в канал, механизма перемещения датчика вдоль
5 оси канала, образцовых средств измерений параметров среды.
Общими признаками прототипа и предлагаемого способа градуировки является заполнение канала рабочей средой,
0 аведении в участки канала контрольной ды из дополнительных емкостей, перемещение датчика вдоль оси канала.
Отличительными признаками в части устройства является наличие в канале уста5 новки передвижных перегородок с механизмами их открывания и закрывания, механизма перемешивания рабочей и контрольной сред и регулируемой муфты сцепления в механизме перемещения датчика.
0 Отличительными признаками в час. и способа является предварительное nepeNe- шивание рабочей среды в канале, измерение начального значения параметра, установка поперек канала непроницаемых
5 для параметра перегородок, образующих замкнутые секции канала, расчет соотношения между объемами полученных секций и соответствующих им дополнительных емкостей, установка треоуемого и равномерно
распределенного по объему каждой секции
значения параметра, перемещение датчика через секции таким образом чтобы не допустить выхода его из рабочей среды, открывание перегородок между секциями, или их частей лишь на время прохождения через них датчика, причем, таким образом, чтобы ширина зоны неопределенности контрольной среды между секциями не превышала толщины перегородки, либо ее части, а при малых значениях плотностей контрольной среды, обеспечение ввода датчика в канал снизу, для чего предварительно переворачивают установку на 180° градусов относительно ее горизонтальной оси
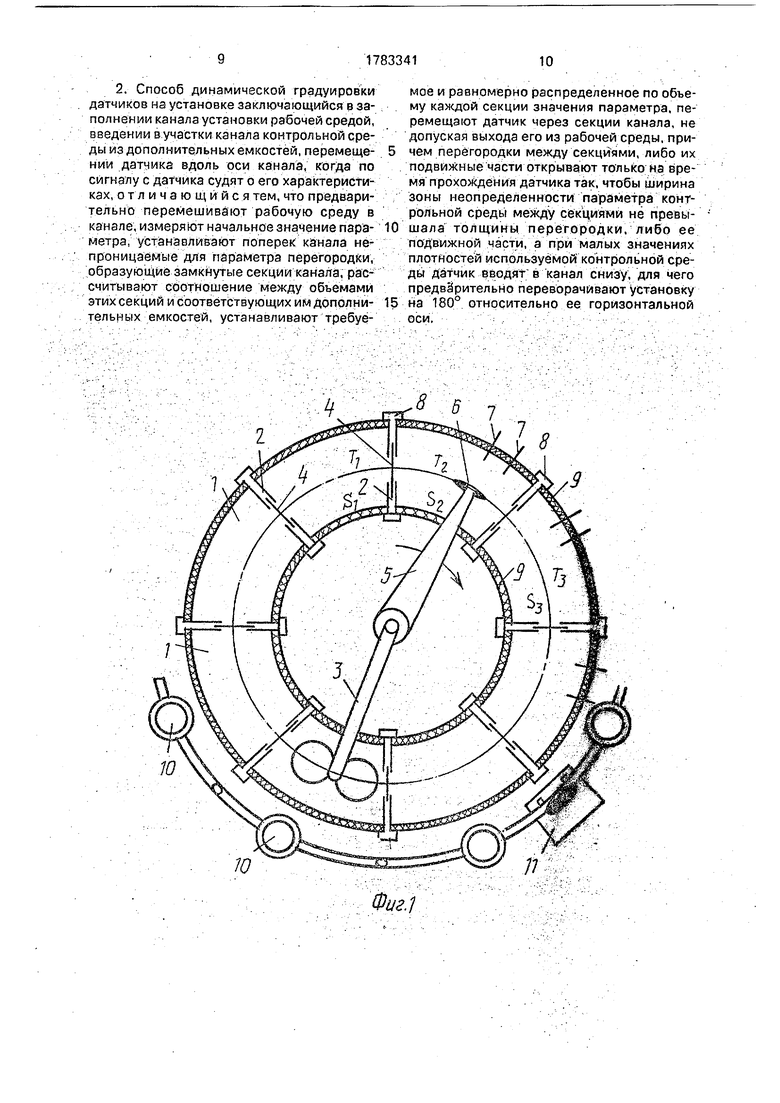
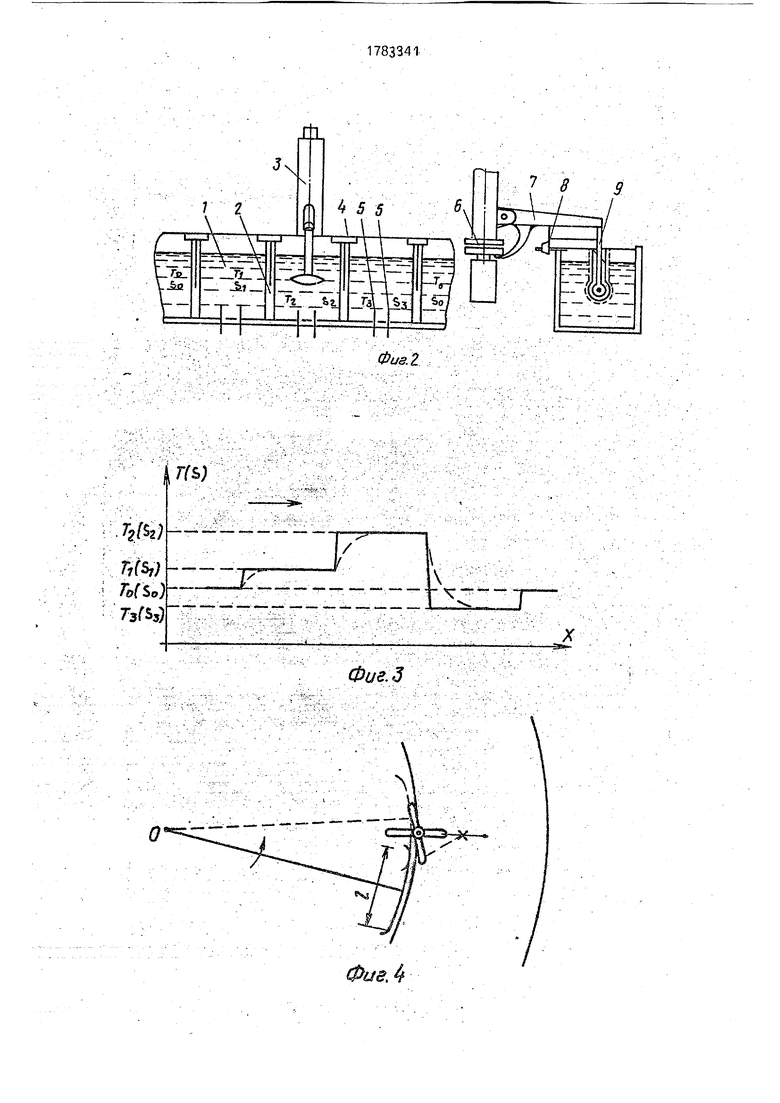
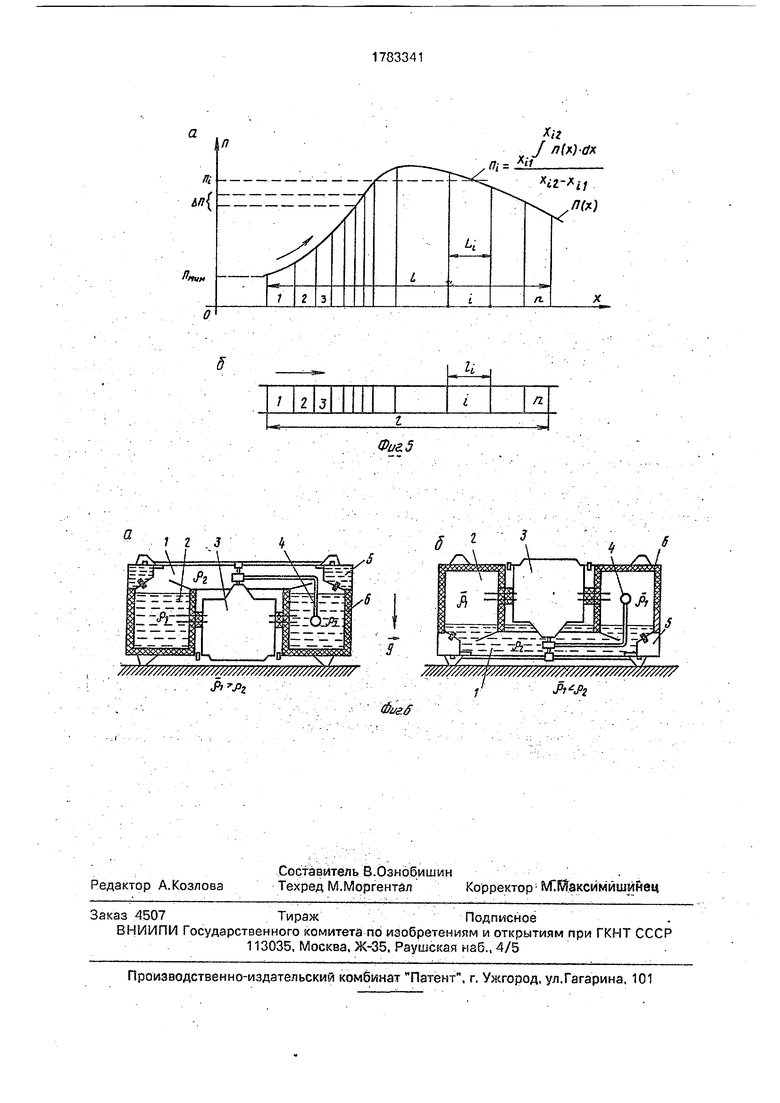
На фиг,1 приведен схематический чер- теж установки; на фиг 2 - расположение основных составных частей; на фиг.З - пример распределения параметра по секциям канала; на фиг.4 - принцип автоматического открывания и закрывания шторок в перегородках, на фиг 5 - способ задания параметра по выбранной модели его распределения; на фиг 6 - возможность работы установки с контрольными средами в широком диапазоне их плотностей
Установка для градуировки датчиков (фиг 1) содержит канал с секциями 1, который разделен перегородками 2, в которых размещены шторки 4 и механизмы для их открывания 8 Для перемещения датчика б вдоль оси канала служит консоль 5, передающая движение датчику от вращающейся штанги Устройство содержит также механизм 3 для перемешивания среды, образцовые измерители параметров среды 7, дополнительные объемы 10 с устройствами 11 для одновременного введения среды из этих объемов в секции канала, а на внутренние стенки секций нанесено термоизолирующее покрытие 9
Градуировку датчика измеряющего некоторый параметр среды производят следующим образом и в последовательности:
1.Наполняют канал средой до мини- мального уровня, необходимого для градуировки датчиков. Определяют начальный объем среды в канале V0 Определяют наибольший объем канала Vmax. исходя из наибольшего допустимого уровня среды в канале.
2.Перемешивают среду в канале для получения равномерного распределения начальных параметров среды по объему канала Измеряют начальное значение пара- метра среды П0
3.Устанавливают в канал перегородки со шторками и механизмами их открывания. Расстояния между перегородками выбирают из условий постановки задачи. Определяют начальные объемы среды в каждой i-ой секции канала V0i
4Рассчитывают нижний предел значений коэффициента пропорциональности между объемами дополнительной емкости и секции канала Kmin Выбирают значение К
ИЗ УСЛОВИЙ К Kmin
Kmln (3)
Vmax - Vo
5Рассчитывают объемы среды в дополнительных емкостях соответствующих секций канала Vgt
V - (4)
6Заполняют дополнительные емкости средой в объемах указанных в п 5 при произвольно выбранных для них значениях параметра Пд|
7Одновременно вносят среду из дополнительных емкостей в секции канала, перемешивают и рассчитывают значение параметра среды П) в каждой секции по формуле (1)
КП0+Пд|
К + 1
8Перемещают градуируемый датчик вдоль оси канала с открыванием шторок в перегородках на время прохождения датчика через перегородку. Фиксируют уровни и форму сигнала с выхода датчика и сопоставляют со значением параметра П| в каждой секции канала
На фиг 3 приведен пример задания параметра в секциях канала и пример формы сигнала на выходе датчика (штриховая линия) с приведенными уровнями. Направление движения датчика показано стрелкой
П р и м е р 1. Кольцевой канал постоянного сечения сИ),15м с длиной по оси м, начальным объемом среды л и наибольшим объемом среды л запол- няют водой с начальным значением параметра (например соленость), измеренной с точностью iO,1%. Вычисленное зна чение Kmin для этого канала составляет 2.
Вариант 1. Измеренное начальное значение солености в канале . Разгораживаем канал на перегородок, образующих равные по объемам секции с л каждая (,2,3.4,5). Наполняем дополнительные емкости средой в объемах () л каждая, задаем значение солености среды в этих объемах соответственно: (пример)
Пд1-10%0, ЛВ2-15%0, ,
, определенные с- погрешностью ±0,1%.
Рассчитываем значения солености е каждой секции канала
ГН 0,1%о, ,15%о. ,35%о, ,05%о, ,1%о
которая определена с относительной погрешностью также Ј 0,1 %о, что соответствует наибольшей абсолютной погрешности задаваемых значений солености равной t3,5 , которая недостижима при иных способах градуировки датчиков.
Вариант 2. Известна зависимость (реализация) распределения солености в воде S(x), приведенная на фиг.5, при длине реализации м и с минимальным значением солености на выбранном участке . Разбиваем эту реализацию на п отрезков, длины которых выбираем из условия равенства разностей солености на концах каждого отрезка, например ,1%o, Рассчитываем масштаб модели реализации для указанной выше конструкции канала
NH/L(5)
При известной зависимости (x) вычисляем значение для каждого 1-го отрезка по формуле (2)
Xi2
j S(x)dx
с jj
x,z-x,i
где Xi2-Xn L - длина i-ro отрезка реализации L. Устанавливаем в канал п перегородок, расстояния между которыми выбираем равными:
, М LI (6)
Выбираем коэффициент пропорциональности между объемами дополнительных емкостей Vqj и соответствукщих им секций /ю из условий К Kmin.
Определяем начальные объемы полученных секций V0i- -т Vo
где Vo - начальный объем среды, I - длина канала по оси. Определяем объемы среды в дополнительных емкостях и задаем значения соленостей в этих емкостях равные:
Sg(K(S,-So)+S,(7)
с наивысшей достижимой точностью.
Пример. Требуется снять сравнительные характеристики датчика пульсаций солености по модели распределения, описываемой функцией S{x) на интервале реализации 1м х 5м ,длина канала I- 8 м. шаг реализации по значениям солености AS 5а.
1.Определяем масштаб моделирования
2.Определяем приведенное значение солености на концах отрезков а указанном интервале при выбранном шаге реализации, искпючая постоянное значение So .
, , , , ЗдМба, ,
3. Определяем координаты концов отрезков для реализации s (x)ax2 ,
, Х22 Х31 VTT, Х32 Х41 4, V/FT Х52 Х61 5,
Получаем отрезков.
4. Разбиваем канал на секций, устанавливая перегородки на расстояниях Ь, вычисленных по формуле: li M(xi2-xn) li I2 2(/Т1«У(5К 1з 2(4- vTT }м, ( V2T-4) м, I5 2(5- )M.
5. Вычисляем значение задаваемой солености в каждой секции канала по формуле (2):
xi2
/ S(x)dx
Si Х|1Х;2 Х|1 |ixn2+ xl22+ x,i. So
Si |(7bV6)+S0, (17+ V66)+S0, S3 I (27+ 4 VTf)+S0,
$4 | (37+ 4 V2l So, SG | (46
)+ So
6 Вычисляем требуемое значение соле- но сти в дополнительных емкостях пофор у- ле: (при выбранном коэффициенте К, например, )
SgKK+1)S,,-8So
Sgi За(7 f- V6) i So, (17+ VBB)+ S0 S03- 3a(27+ 4 V11 )+So, Sg 3a(37+
4 V2T)+S0
(46+5
Начальное значение солености S0 ycтанавливают в канале до разгораживания его на секции.
Формула изобретения 1. Установка для динамической градуировки датчиков, содержащая горизонтально
расположенный герметизированный канал, заполняемый рабочей средой, дополнительные емкости для контрольной среды с заданным значением параметра, механизм подачи контрольной среды в канал, ме анизм перемещения датчика по оси канат а, образцовые средства измерений, отличающаяся тем, что, с целью повышения точности градуировки датчиков, канал установки дополнительно содержит подвижные
перегородки с механизмами их открывания и закрывания, механизм перемешивания рабочей и контрольной сред, а механизм перемещения датчика снабжен регулируемой муфтой сцепления.
2. Способ динамической градуировки датчиков на установке заключающийся в заполнении канала установки рабочей средой, введении в участки канала контрольной среды из дополнительных емкостей, перемещении датчика вдоль оси канала, когда по сигналу с датчика судят о его характеристиках, отличаю щийся тем, что предварительно перемешивают рабочую среду в канале, измеряют начальное значение параметра, устанавливают поперек канала непроницаемые для параметра перегородки, образующие замкнутые секции канала, рассчитывают соотношение между объемами этих секций и соответствующих им дополнительных емкостей, устанавливают требуе0
5
мое и равномерно распределенное по объему каждой секции значения параметра, перемещают датчик через секции канала, не допуская выхода его из рабочей среды, причем перегородки между секциями, либо их подвижные части открывают только на время прохождения датчика так, чтобы ширина зоны неопределенности параметра контрольной среды между секциями не превышала толщины перегородки, либо ее подвижной части, а при малых значениях плотностей используемой контрольной среды датчик вводят в канал снизу, для чего предварительно переворачивают установку на 180° относительно ее горизонтальной оси.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической градуировки датчиков давления | 1989 |
|
SU1728687A1 |
| Способ динамической градуировки пьезоэлектрических датчиков давления | 1990 |
|
SU1753314A1 |
| Устройство для градуировки гидрофизических измерительных приборов | 1973 |
|
SU518803A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЛАГОСОДЕРЖАНИЯ И ОТБОРА ПРОБ В ТРЕХКОМПОНЕНТНЫХ СМЕСЯХ ИЗ ДОБЫВАЮЩИХ НЕФТЯНЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2678955C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ ГРАДУИРОВКИ ВАКУУММЕТРОВ | 1997 |
|
RU2190200C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ ГРАДУИРОВКИ ДАТЧИКОВ ДАВЛЕНИЯ | 2010 |
|
RU2480725C2 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ СЧЕТЧИКОВ ЖИДКОСТИ И ГАЗА | 1992 |
|
RU2037788C1 |
| Способ динамической градуировки датчиков давления | 1990 |
|
SU1758458A1 |
| Устройство для динамической градуировки датчиков давления | 1985 |
|
SU1303868A1 |
| Способ динамической градуировки и поверки средств измерения расхода жидкости в потоке | 1990 |
|
SU1774185A1 |
Использование: контрольно-измерительная техника для градуировки и поверки датчиков средних и пульсационных значений движущихся сред. Сущность изобретения: установка содержит горизонтально расположенный герметизированный канал, заполняемый рабочей средой. Канал содержит подвижные перегородки, разделяющие канал на секции, с различными параметрами среды. Градуируемые датчики перемещают через секции канала, открывая перегородки только на время прохождения датчика, 2 с.п. ф-лы, 6 ил.
4
Ю
7
8
Фиг.1
-J
1
Ј гпф
(sul
2 8ЛФ
IbttQLl
Jfe9 9PffiЈSftMrS
////////////7///////
&rj)z
ШШ//Щ////////////
1
.1
| Сангалов А.А | |||
| Использование высокочастотного нагрева для градуировочного стенда пульсаций температуры в потоках жидкости | |||
| Труды ВНИИФТРИ, 1979 | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Устройство для градуировки гидрофизических измерительных приборов | 1973 |
|
SU518803A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
