Известные устройства для дифференциального трансформирования аэроснимков применяются только с фотограмметрическими приборами, работающими по принципу оптического проецирования, и содержат инверсор, суппорт аэроснимка и экран, перемещаемые один относительно другого в трех взаимно перпендикулярных плоскостях.
Предлагаемое устройство для дифференциального трансформирования аэроснимков может работать в сочетании с любым фотограмметрическим прибором, предназначенным для обработки аэрофотоснимков.
Описываемое устройство отличается от извесТных тем, что в его инверсоре предусмотрены редуцирующие устройства для управления коэффициентом трансформирования аэроснимка с учетом текущего фокусного расстояния, соответствующего преобразованным координатам текущей точки наклонного аэроснимка на горизонтальный снимок. Таким образом достигается повышение точности, с которой приводится изображение элементарного участка к заданному масштабу.
Кроме того, инверсор выполнен в виде стержней, перемещаемых по направляющей, и кулис, шарнирно прикрепленных к каждому стержню с возможностью поворота вокруг оси /Y-X и пересекающих направляющую в точке, лежащей на этой оси. Для электрического управления коэффициентом трансформирования в цепи электродвигателей, регулирующих изменение расстояний от объектива до аэроснимка и от объектива до экрана, введены электрические мостовые схемы для обработки данных, поступающих от фотогра метрического прибора.
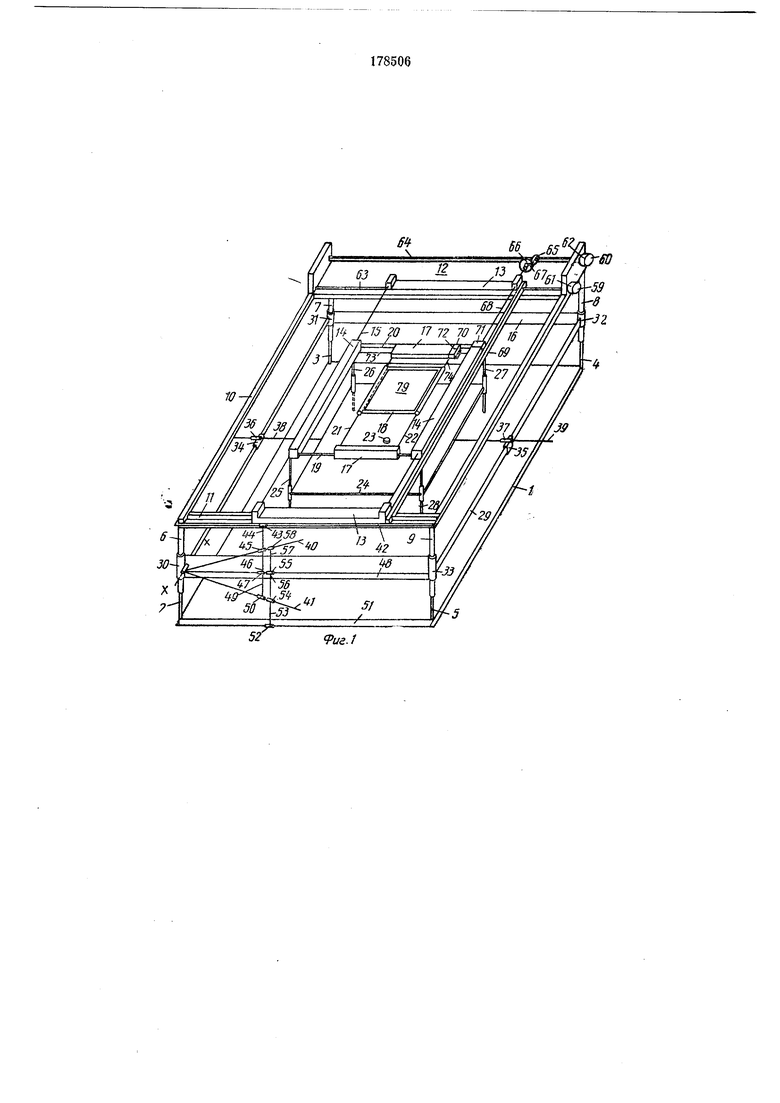
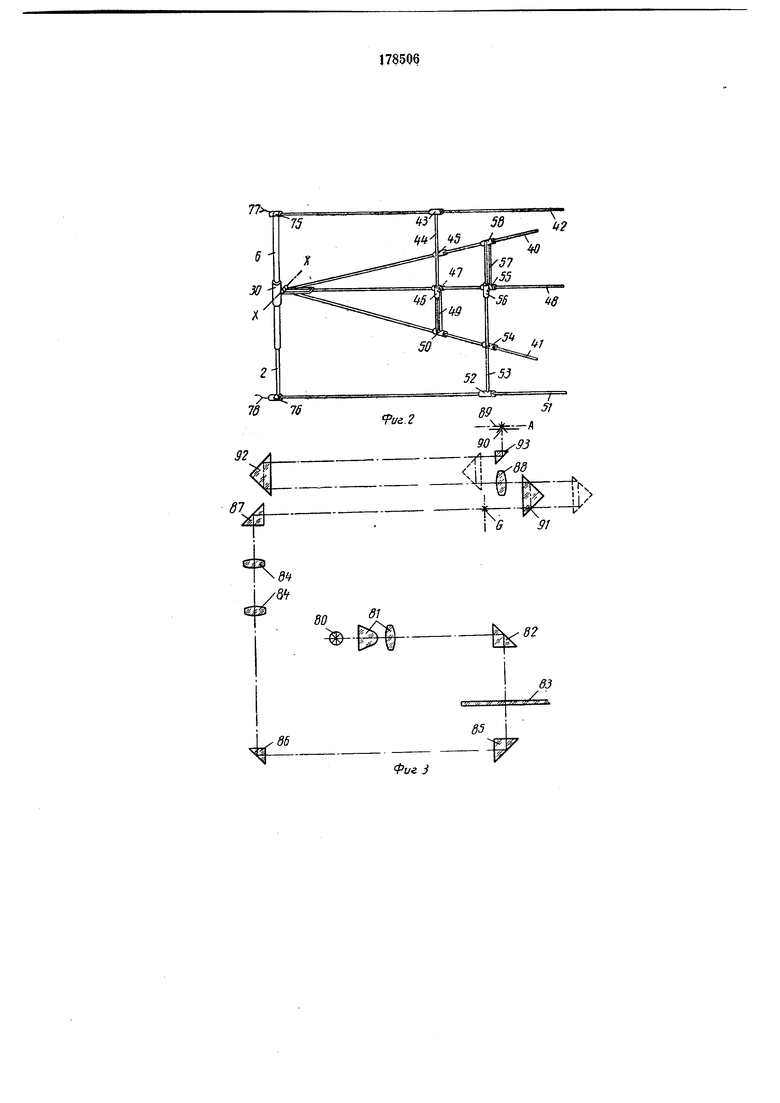
На фиг. 1 изображено предлагаемое устройство для дифференциального трансформирования аэроснимков; на фиг. 2 - соответствующий инверсор в увеличенном масштабе; на фиг. 3 - оптическая схема устройства; на фиг. 4 и 5 - ииверсор, выполненный в Других вариантах.
К четырем углам основной плиты / вертикально прикреплены четыре стержня круглого сечения 2, 3, 4 и 5, по которым скользят цилиндры 6, 7, 8 и 9, прикрепленные к углам рамы 10. Она имеет две направляющие Л и 12 для салазок 13, на которых перпендикулярно к направлению перемещения первых салазок по двум направляющим стерл ням 15 и 16 можно перемешать другие салазки 14. На Мйх расположена еще одна система перекрестных салазок, состоящая из салазок 17 и 18. Салазки 17, перемещаемые вдоль двух направляющих стержней 19 и 20, являются носителем салазок 18, перемещаемых вдоль иаправляющего стержня 21 и шпинделя 22. Несущая объектив 23 плита 24 перемещается перпендикулярыо плоскостям перекрестных салазок по паправляющим 25, 26, 27 и 28, прикрепленным к салазкам 14 параллельно стержням круглого сечения 2, 3, 4 и 5. Рама 29, перемещаемая при помощи втулок 30, 31, 32 и 33, скользящих по цилиндрам 6, 7, 8 и 9 между основной плитой 1 и рамой 10, соединена с плитой 24 и объективом 23 через две перемещаемые на противоположных сторонах рамы опоры 34 и 35 для двух направляющих 36 и 37, в которых скользят два прикрепленных к плите 24 стержня 38 и 39. Кроме того, к раме 29 прикреплены две кулисы 40 и 41, поворачиваемые вокруг оси X-А в плоскостях, перпендикулярных к плоскостям перемещения перекрестных салазок и параллельных к направлению перемещения салазок 13. При помощи шпинделя 42 на раме 10 и ходовой гайки 43 перемещается вертикально расположенный стержень 44, с которым связан перемещаемый вдоль кулисы 40 ползун 45, находящийся на расстоянии от ходовой гайки 43, равном фокусному расстоянию объектива 23. Стержень 44 скользит в направляющей 46, жестко связанной с салазками 47, которые скользят по параллельной шпинделю 42 направляющей 48 на раме 29. К салазкам 47 одним концом прикреплен параллельно стержню 44 стержень 49, к другому концу которого на расстоянии, равном фокусному расстоянию объектива 23, прикреплен скользящий по кулисе 41 ползун 50. На основной плите / находится другой шпиндель 51, параллельный нанравляющей 46 и определяющий вместе со щпипделем 42 вертикальную плоскость. Вдоль этого щпинделя перемещается маточная гайка 52 для вертикально расположенного стержня 53, к которому на расстоянии от маточной гайки 52, равному .фокусному расстоянию объектива 23, прикреплен поворотный ползун 54, скользящий но кулисе 4.1. Вдоль стержня 53 перемещается прикрепленный к салазкам 55 ползун 56. Салазки скользят по направляющей 48, причем салазки 55 несут вертикальпый стержень 57, к свободному концу которого на расстоянии, равном фокусному расстоянию объектива 23, нри помощи шарнира прикреплен неремещаемый по кулисе 40 ползун 58. Перемещениями салазок 13 и 14 управляет через электрические датчики, каналы передачи 59 и 60, а также через распололсенные па верхней раме 10 приемники 67 к 62 в соответствии с координатами объектного пространства и У, прибор для обработки снимков (па чертеже не показан). Приемник 61 приводит в- действие расположенный на раме 10 шпиндель 63, -находящийся в зацеплении с салазками 3. Кроме того, с приемником 62 связан расположенный на раме 10 стержень 64 с квадратным сечением, который через пару конических шестерен 65 и 66 и через поводок 67 приводит в действие шпиндель 68, расположенный под прямым углом к стержню 64 на салазках 13 и находящийся в зацеплении с салазками 14. Салазки 17 и .18 перемещаются но координатам X и У стереопары в приборе обработки. Для этого отнесенные к горизонтальной плоскости координаты стереопары через электрические датчики, капалы передачи 69 и 70, а также через расположенные на салазках 14 и 17 приемники 71 и 72 прибором обработки передаются на шпиндели 73 и 74, которые находятся в зацеплении с салазками 17 и 18. Привод расположенных на раме 10 и на основной плите 1 соответственно шпинделей 42 и 51, служащих для перемещения салазок 47 и 55 и тем самым и стержней 44 и 49 ц 53 и 57 соответственно вдоль направляющей 48, осуществляется через электрические приемники 75 и 76 (см. фиг. 2), каналы передачи 77 и 78 прибором для обработки (на чертеже не показан). Причем салазки 55 перемещаются по координате У объектного пространства- и ползуна 58 но так называемому моментальному фокусному расстоянию С . При этом изменяются расстояния между ползунами 45 и 54 и соответствующими салазками 47 и 55, и рама 29 с втулками 30, 31, 32 и 33 перемещается по цилиидрам 6 - 9, а рама 10 перемещается на своих цилиндрах 6 - 9 по стержням с круглым-сечением 2 - 5. В целях выполнения осповпого уравнепия оптики и пзлмепения коэффициента трансформирования расстояния между проекциоппым объективом 23 и основной плитой 1, служашей в качестве экрана, с одной стороны, и салазками 18, служащими в качестве суппорта аэроспимков, с другой стороны, изменяются в необходимой для дифференциального трансформирования мере. Расположенный на салазках 18 аэроснимок 79 частично освещается при помощи источника света (на чертеже не показан) и объективом 23 изображается в неискаженном виде во всех деталях на совпадающем с поверхностью основной плиты 1 экране. При варианте согласно фиг. 1 и 2 можно изменять, с одной стороны, расстояния между плоскостью аэроснимка и средней плоскостью объектива и, с другой стороны, расстояния между средней плоскостью объектива экрапом, а при варианте согласно фиг. 3 аэроснимок и экран перемещаются только в своих взаимно параллельпых плоскостях. Такое выполнение создает предпосылки для альнейшего усовершенствования устройства в целях получения дополпительиого прибора к прибору для обработки. Световой пучок от источника 80 (см. фнг. 3) оступает через двухкомпонентный конденсор 1 па гипотенузную грань прямоугольной ризмы 82, отражается и освещает участок эроснимка 83, расположенного в фокальной лоскости двухкомпонептной линзовой систеы 84. Две прямоугольные призмы §5 и 86 лужат для поворота на 180° луча между эроспимком и объективом. После поворота
лучей прямоугольной призмой 87 освещаемый участок аэроснимка 83 двухкомпопептной линзовой системой отражается в предметную плоскость объектива трансформирования 88, в фокальной плоскости А которого находится экран 89, отчасти охватываемый щелью 90. Между плоскостью объектива G и объективом трансформировапия 88, а также между последним и экраном 89 ход лучей при помощи перемещаемых в направлении хода лучей 90-градусного отражателя или 90-градусных призм 91 и 92 соответственно отклоняется на 180° и после отражения от гипотенузной грани прямоугольной призмы 95 падает на экран 89.
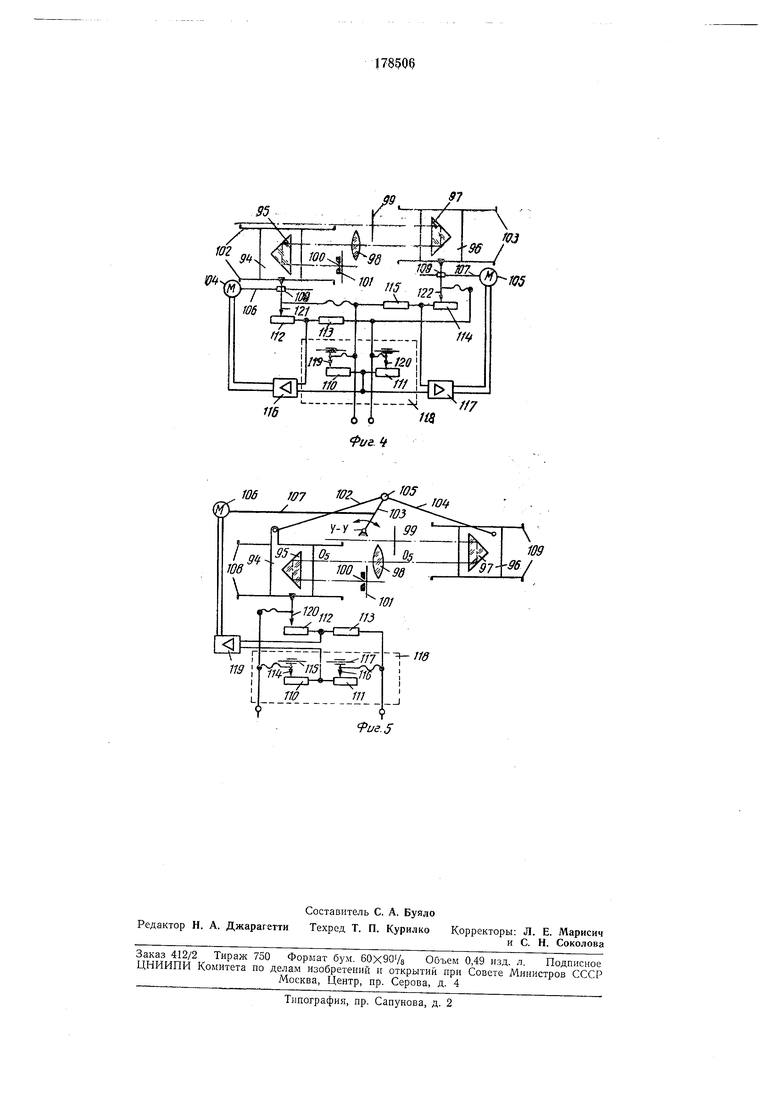
Перемещением призм 91 и 92 можно управлять при помощи инверсора, изображенного на фиг. 1 и 2, или инверсора, изображенного на фиг. 4 и содержащего держатель 94 призмы 95, держатели 96 призмы 97, объектив 95, аэроснимок 99 и щель 100 перед экраном 101. Перемещение дерлсателей 94 и 96 по направляющим 102 и 103 осуществляется моторами 104 и 105 через шпиндели 106 и 107 и связанные с держателями маточпые гайки 108 и 109 соответственно. Для управления моторами 104 и 105 служат два вычислительных моста с общими потенциометрами 110 и 111, а также с потенциометрами 112 и 113 для одного моста п с потенциометрами И4 и 115 для другого моста и два усилителя 116 п 117. Потенциометры 110 и /// связаны с прибором 118 для обработки таким образом, что контакт 119 задает вычислительным мостам координату Z (высоту) объекта пространства, а контакт 120 - моментальное фокусное расстояние С„. Если контакты 119 и 120 изменяют свое положение, в каждом мосте возникают токи в диагонали, через усилители 116 л 117 приводящие в действие моторы 104 и 105. Тем самым жестко связанные с маточными гайками 108 и 109 контакты 121 и 122 перемещаются по потенциометрам 112 и 114 до тех пор, пока ток в диагоналях мостов не прекратится. При этом призмы 95 и 97 занштают такое положение, которое обеспечивает не только резкость изображения, но и правильное соотношение масштабов проекции и аэроснимка.
Инверсор, работающий на электромеханическом принцнпе (см. фиг. 5). содержит призмы 95 и 97, держатели 94 п 96 призм, объектив 98, аэроснимок 99, щель 100 и экпан 101. Двойная шатунная передача, части 102, 103 и 104 которой, с одиой стороны, связаны между собой через один тпарнир 105, а с другой сторопьт, поворачиваем, вокруг жестко фиксированной оси У-У, т. е. связат через 1 арниры с держателями 94 м 96 . пр водится в движе1 1 е через лютор 106, действующий а часть 103 через пату:1 107 так, что эта передача сипфазно перемешает держатели 94 и 96 призм 95 и 97 в их направляющих 108 п 109 по направлению оптической оси Оз-О
объектива 95. Ось У-У, вокруг которой вращается часть 103, и точки соединения частей 102 и 104 с держателями 94 и 96 призм находятся в одной плоскости.
Так как перемещение обоих держателей 94 и 96 призм осуществляется только одним мотором 106, то для управления этим мотором необходим только один вычислительный мост на четырех цотеппнол1етрах ПО, 111, 112 и /13. Потенциометр 110 через контакт 114 связан с Z - шпинделем 115, а потенциометр 113 через контакт 116 связан с С -шпинделем 117 прибора 118 для обработки. Когда в приборе для обработки изменяются значения Z и Сд., должны перемещаться контакты 114 п 116 потенциометров 110 п ///, вследствие чего сопротивления в плечах моста больше не равны друг другу, и в диагонали моста возникает ток, который через усилитель 119 подается па мотор 106 и вращает его в требуемом направлении. Так как мотор перемещает держатель 94 призм и тем самым н прикрепленный к нему скользящий на потенциометре 112 контакт 120, сопротивления в плечах моста приравниваются друг другу, а ток в диагонали прекращается. В этот момент выключается мотор.
Предмет изобретения
1.Устройство для дифференциального трансформирования аэроснимков, сопряженное с фотограмметрическим прибором для обработк 1 аэроснимков, содержащее инверсор, обеспечивающий выполне 1ие основного уравнения , суппорт аэроснимка и экран, перемещаемые один относ 1тельпо другого в трех взя тлтио нерпенд тклляр 1тх плоскостях, отличающееся тем, что, с целью повыщения точности приведения и ображет я элементарного участка к заданному мас итабу. в инверсоре предусмотрены редуцпрующ1 е устройства для управления коэффи 1иентом трансформирования аэооснимка с учетом текущего бокусного расстояния, соответствующего преобразова тныАт коорд тната т текуптей точки нак,1онпого аэроснимка на горизоптальн 1тй аэросни1V OK.
2.Устройство по п. 1, отличающееся тем, что 1шерсор выполнен в виде стержней, пепеметцяе.тых по направляющей, и кулис, шаргтирпо при :репле П Ь|Х к каждому стержню с возлюжпостью поворота вокруг оси Х-X и пересекаюптпх ттяплагляющую в точке, лежащей на оси X-X.
3.Устройство по п. 1. отличающееся тем, что, с целью электр тческого управлен я коэффп 11 С том тпа сформирова1 ия, в цеп1 электролт гятелей, neгy. 1 Змене П е расстояп1 т от объект 1вп до аэроснимка и от объектива до экрана, введены электрические мостовые схемы для обработки данных, поступающих от фотограмметрического прибора.
9иг.1
6 76
dff /Qf
6951
fc/г.г
-- л W / V ая i 3
-tr.
(
6 91
80
82
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дифференциального трансформирования плановых аэроснимков | 1985 |
|
SU1392374A1 |
| Фототрансформатор | 1982 |
|
SU1081415A1 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ДЛЯ | 1973 |
|
SU395714A1 |
| ФОТОТРАНСФОРМАТОР ДЛЯ ПЕРСПЕКТИВНЫХ АЭРОСНИМКОВ | 1971 |
|
SU301528A1 |
| СПОСОБ РАЗВЕРТКИ ПАНОРАМНЫХ АЭРОСНИМКОВ | 1965 |
|
SU173961A1 |
| Приставка к стереофотограмметрическому прибору | 1984 |
|
SU1168801A1 |
| ФОТОТРАНСФОРМАТОР ДЛЯ ДИФФЕРЕНЦИАЛЬНОГО ТРАНСОРФОМИРОВАНИЯ АЭРОФОТОСНИМКОВ | 1967 |
|
SU224821A1 |
| ФОТОТРАНСФОРМАТОР | 1968 |
|
SU220520A1 |
| Ортофототрансформатор | 1977 |
|
SU714148A1 |
| ФОТОПРИСТАВКА К СТЕРЕОПРИБОРУ | 1968 |
|
SU218447A1 |
85
Фиг 3
106
