2
сл
со со
1чЭ
СО
4:
угольного инверсора. Воздействием линейки 24 на ролик 27 перемеща:ется каретка 30 плоскости экрана 29. Механизм привода экрана 29 выполнен в виде ленкеров .35, 36, нижние концы которых посредством шаровых шарниров закреплены на каретке 5 левого снимка. Смещение Р-каретки 4 на величину горизонтального параллакса осуществляется ходовым винтом 10 путем вращения штурвала 13. В средней части ленкеры 35, 36 соединены с четырьмя круглыми стержнями 37, лежащими в плоскости объектива 20. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство к стереоприборам для ввода в поле зрения дополнительного изображения | 1981 |
|
SU996864A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU309241A1 |
| ФОТОТРАНСФОРМАТОР ДЛЯ ДИФФЕРЕНЦИАЛЬНОГО ТРАНСОРФОМИРОВАНИЯ АЭРОФОТОСНИМКОВ | 1967 |
|
SU224821A1 |
| Фототрансформатор | 1982 |
|
SU1081415A1 |
| Стереопреобразователь | 1955 |
|
SU110486A1 |
| Монокомпаратор | 1982 |
|
SU1057783A1 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ПЛОСКОГО ТИПА ДЛЯ ОБРАБОТКИ АЭРОСНИМКОВ И СНИМКОВ НАЗЕМНОЙ | 1966 |
|
SU188044A1 |
| ФОТОТРАНСФОРМАТОР | 1968 |
|
SU220520A1 |
| Стереокомпаратор | 1981 |
|
SU987386A1 |
| УНИВЕРСАЛЬНЫЙ | 1971 |
|
SU315922A1 |
Изобретение относится к фотограмметрическому приборостроению и позволяет повысить экономичность устр-ва за счет снижения затрат на изготовление блока изменения увеличения. На каретке 21, установленной на направляющих 22 с возможностью перемещения в вертикальной плоскости, закреплена ось линеек 23 и 24 прямо
1
Изобретение относится к фотограмметрическому приборостроению, а более конкретно - к дифференциальным оптико-механическим фототрансформаторам, и может быть использовано ;щя трансформирования плановых аэроснимков с целью получения ортофотосним- ков.
.Цель изобретения - упрощёни е уст- ройства путем исключения вычислителя
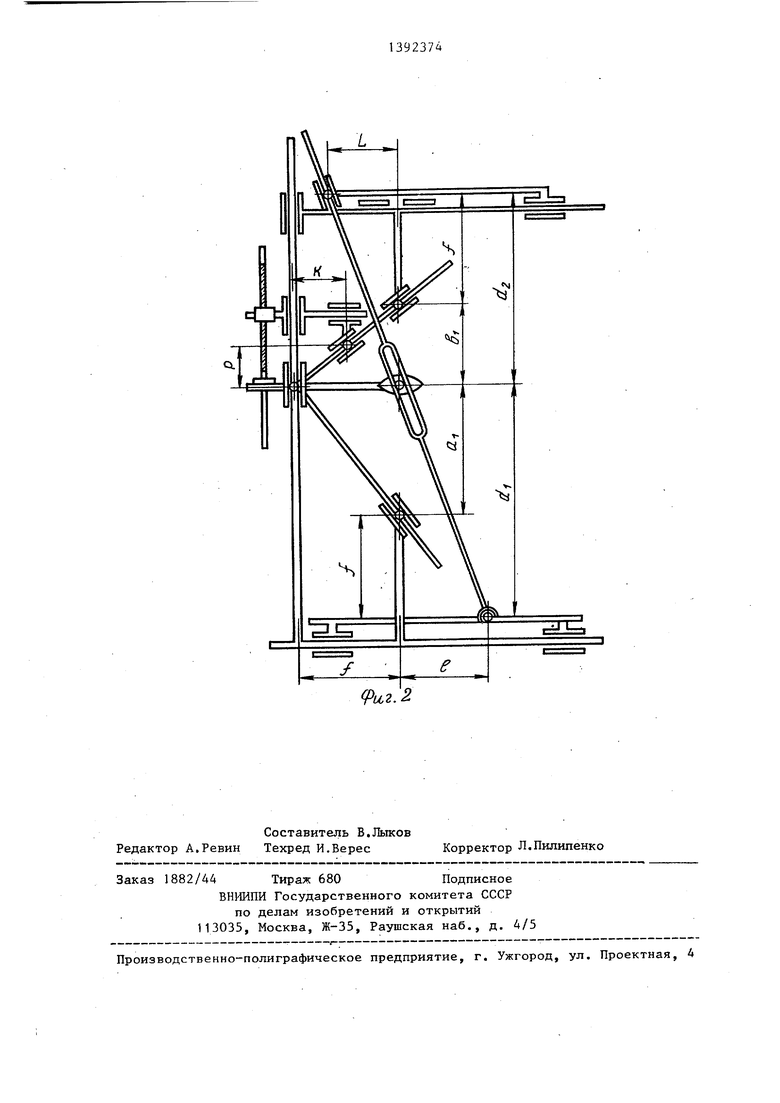
На фиг. 1 изображено предла гаемое устройство, аксонометрия; на фиг.2 - схема проектора.
Устройство содержит стереоизмери- тельный блок, выполненный в виде че- тырехкареточного трехярусного стерео компаратора с неподвижной наблюдательной системой, и состоит из станины 1, Х-каретки 2, У-каретки 3, Р- каретки 4 и каретки 5 левого снимка.
В первом ярусе на направляющих станины 1 находится основная Х-карет ка 2, соединенная с гайкой 6 ходового -винта 7, с помощью которого Х-кач ретка 2 перемещается параллельно оси X устройства.
На Х-каретке 2 параллельно оси У устройства закреплены направляющие, в которых находится каретка второго яруса,- У-каретка 3, соединенная с гайкой 8 ходового винта 9, подшипник которого также закреплены на Х-каретке 2.
На У-каретке 3 параллельно оси X закреплены направляющие, в которых находятся две каретки третьего яруса - Р-каретка 4 продольных параллаксов и каретка 5 левого снимка. Р-каретка 4 соединена с гайкой (не показана) ходового винта 10, подшипники которого закреплены на У-каретке 3. Ходовой винт 10 соединен с валом се.п сина 11, который электрически соединен с задающим сельсином 12, уста
новленным на валу штурвала 13 продольного параллакса. Каретка 5 левого снимка соединена с гайкой отдельного ходового винта, подшипники которого также закреплены на У-каретке 3. Каретка 5 имеет устройство для фиксирования ее на направляющих (ходовой винт с гайкой каретки 5 и устройство ее фиксации на фиг. 1 не показаны).
Наблюдательная система состоит из двух оптических систем с осветителями. Каждая из систем состоит из треугольных призм 14, и 15, объектива 16, сетки 17 и окуляра 18. В левой
5 оптической системе вместо первой треугольной призмы установлен куб 19 со светоделительной диагональной гранью. Объектив 16 правой оптической системы установлен на направляющих с целью
0 обеспечения возможности перемещения его по оси У для устранения влияния поперечного параллакса, при этом в ход лучей введена телескопическая система.
5 Узел дифференциального трансформирования состоит из фронтального проектора с масштабным инверсором и механизмом привода экрана.
Фронтальный проектор состоит из
0 объектива 20, закрепленного на каретке 21 инверсора на расстоянии f (f - фокусное расстояние объектива 20) от направляющих 22 (по оси Х), по которым каретка 21 может перемещаться
сВ вертикальной плоскости. На каретке 21 закреплена ось линеек 23 и 24 прямоугольного инверсора. Линейка 23 ножницами постоянно прижата к ролику 25, ось которого закреплена на
0 стойке 26 на расстоянии f (по оси Z) от плоскости левого снимка. Стойка 26 закреплена на станине 1 устройства. Линейка 24 постоянно прижата к ролику 27, ось которого закреплена
31
на стойке 28 на расстоянии f (по оси Z) от плоскости экрана 29. Стойка 28 закреплена на каретке 30 и несущей плоскостью экрана способна перемещаться по направляющим 22 в вертикальной плоскости. К ребру линейки 2 прижат ножницами также и ролик 31, ось которого установлена на малой каретке 32, находящейся на направля- ющей 22 и имеющей возможность перемещения по оси Z. На каретке 32 закреплена гайка ходового винта 33, который зубчатой передачей соединен с валом штурвала 13 ручного привода Р-каретки. Ролик 31 с помощью винта 34 может перемес|аться по малой каретке 32 в направлении оси X и фик-, сироваться в различных положениях.
Механизм привода экрана состоит из ленкеров 35 и 36, нижние концы которых с помощью шаровых шарниров, расположенных в плоскости снимков, закреплены на каретке 5 левого снимка. Верхние концы ленкеров скользящи щими шарнирами соединены с плоскостью экрана, что позволяет ленке- рам перемещаться относительно плоскости экрана 29. В средней части лен- керы двойные и насажены на стержни 37, лежащие в плоскости объектива 20 параллельно осям X и У устройства , являющиеся осями вращения ленкеров. Плоскость экрана 29 в горизонтальной плоскости перемещается по двум взаимно перпендикулярным направляющим, закрепленным на каретке 30.
В целом устройство построено по следующей схеме: снимок и экран имеют противоположное направление движения в горизонтальной плоскости. Объ- ектив, щель и осветитель в горизонтальной плоскости неподвижны. Изменения масштаба проектирования и одновременно сохранение резкости изображения обеспечивается прямоугольным инверсором с неподвижной плоскостью снимка Р, перемещающимся по оси Z, объективом и плоскостью экрана. Привод инверсора осуществляется на экранную линейку инверсора от винта продольного параллакса.
Устройство работает следующим образом.
При стереоскопическом наведении измерительной марки на произвольную точку А местности, изобразивщуюся на левом фотоснимке в точке с координатами X, и У,, имеющей горизонтальный параллакс Р, вращают штур
Q
,, 5 5
5 0
5
0
74
вал 13 до тех пор, пока Р-каретка 4 через сельсинкую пару (сельсины I1 и 12)не сместится ходовым винтом относительно нулевого положения на величину Р,. Одновременно с этим вращение штурвала 13 вызывает вращение ходового винта 33, что изменяет положение ролика 31 и линеек 23 и 24 прямоугольного инверсора, а так как один из подшипников ходового винта 33 закреплен на каретке 21, а его гайка - на каретке 32, то расстояние между осью вращения ролика 31 по оси Z всегда бу дет равна величине Р (ходовые винты 10 и 33 должны иметь одинаковый шаг). Ролик 25 установлен на неподвижной стойке 26, следовательно, изменение положения линеек инверсора может происходить только путем перемещения каретки 21 вместе с осью вращения линеек по направляющим 22 с одновременным поворотом их вокруг оси. ПРИ этом линейка 24, действуя на ролик 27, перемещает в вертикальной плоскости каретку 30 экранной плоскости. При этом постоянно выполняется условие ортотрансформирования: масштаб изображения, проектируемого объективом 20 с левого негатива на плоскость экрана, постоянный и равен М. Это условие можно записать следующим образом:
m.,
где М - масштаб изображения в плоскости проекции; m , - масштаб в i-й точке левого
фотоснимка; Vj - увеличение.
Как известно, масштаб в точке на аэроснимке равен
В i РТ .
где В - базис фотографирования; Р - - горизонтальный параллакс
точки.
Увеличение проектирующей системы равно
V -
где d. 5 - расстояние от главной точки объектива до плоскости экрана;
d - то же, до плоскости снимка. Так как расстояние от роликов 25 и 27 до аэронегатива и плоскости проекции равно f (фиг. 2),то
V . bi
Й,+Г
где f фокусное расстояние объекти I ва.
: Расстояние Ъ , (фиг. 2) равно
fP R-Расстояние а, для прямоугольного I инверсора равно
I , fl f-K
I .-ЪТ-Р
Подстановка этих значений в форму-15 ine увеличения проектируемой системы дает:
Условие ортотрансформирования можно записать в следующем виде;
-м к
или
.
Следовательно, оно постоянно выполняется в устройстве при условии,
к-
М
Перенос изображения с рабочей площади стереопары производится участками путем сканирования негатива полосами, при этом смещение измерительной марки по S оси X на величину Х, одновременно сместит на величину X шаровой шарнир ленкера 36, при этом он повернется вокруг стержня 37 и верхним К.ОНЦОМ сместит плоскость экрана 29 по оси X в противоположном направлении н величину, равную
, 1 х,,, v,x, |i х, II.M,,
т.е. уравнение X фактически решается в масштабе М.
Аналогично, смещение плоскости левого снимка по оси У на некоторую величину У. приводит к смещению плоскости экрана в противоположном направлении на величину, в .V. раз большую. При изменении увеличения проектирующей системы изменяется положе5
Ю
15
3923746
ние стержней 37, следосательно, и изменяется увеличение транспортного механизма каретки экрана. Режим работы устройства on-linn. Для удобства сканирования площади снимка привод Х-каретки и У-каретки снабжается электродвигателями (не показаны).
Использование в предлагаемом устройстве в качестве основы не универсального прибора, а стереокомпаратор- ной измерительной части значительно упрощает (по сравнению с известньти) конструкцию устройства и в несколько раз снижает стоимость его изготовления, Формула изобретения
5
0
5
0
5
0
Устройство для дифференциального трансформирования плановых аэроснимков, содержащее станину, стереоизме- рительный блок с наблюдательной системой, проекционный объектив, блок изменения увеличения, кассету и блок перемещения кассеты, о т л и ч а - ю щ е е с я тем, что, с целью повышения экономичности за счет снижения затрат на изготовление блока изменения увеличения, стереоизмерительный блок выполнен дополнительно с У-ка- реткой с ходовым винтом, оптическая наблюдательная система выполнена неподвижной, блок изменения увеличений вьтолнен в виде первой и второй направляющих, первой каретки с четырьмя круглыми стержнями, объективом, двумя жестко соединенными под прямьтн углом линейками, закрепленньтми на первой каретке с возможностью вращения, второй каретки с роликом, первая и вторая каретки кинематически соединены с ходовым винтом продольных параллаксов, станина выполнена со стойкой и роликом связи, кассета выполнена с третьей кареткой, первая и третья каретки закрепленьт соответственно на первой и второй направляющих с возможностью перемещения, механизм перемещения кассеты выполнен в виде четырех ленкёров, нижние концы которых закреплены в плоскости левого снимка на шаровых шарнирах, верхние концы соединены с кареткой кассеты муфтами, а в средней части ленкеры соединены с четырьмя круглыми стержнями шарнирными соединениями.
91мг.
| Photogrammetric Ruger (Pietsh- ner) Reginsburger, VEB Verlag fiir Bauvesen | |||
| Berlin, 1978, p | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
