Изобретение относится к лесной промышленности.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому эффекту является сучкорезная машина содержащая поворотную в горизонтальной и вертикальной плоскостях стрелу с закрепленными на ее противоположных концах еучкорезной и приемной головками. На стреле имеются направляющие, в кото-, рых установлена каретка. Машина имеет гидроцилиндры поворота стрелы в вертикальной и горизонтальной плоскостях и ножей сучкорезной и приемной головок, гидромотор механизма перемещения каретки, а также электрбуправляемые гидрораспределители этих гидроцилиндров.
Система управления содержит каналы управления гидрораспределителями. На входы каналов управления подключены датчик наличия дерева в сучкорезной головке,. датчики давления в гидроцилиндрах ножей сучкорезной и приемной головок, датчики исходного положения ножей сучкорезной и приемной головок, датчик рабочего положения стрелы в вертикальной плоскости, датчик рабочего положения стрелы при ее повороте влево (от оператора) в горизонтальной плоскости, датчик наличия дерева в приемной головке и датчики крайних полоXI00 XI
XI
2
жений каретки, Оператор осуществляет захват комля, лежащего в штабеле деревьев, сучкорезной головкой. Далее система управления обеспечивает полностью автоматический цикл обработки данного дерева
1..
Недостатком данной машины является
то, что в процессе центровки дерева поворот стрель в горизонтальной плоскости может осуществля ть Ся тЬлько влево (от оператора) по отношению к положению стрелы в момент ЗЖвата комля, что ограничивает зону обработки штабеля деревьев с одной рабочей позиции, а также отсутствие возможности совмещения операций поворота стрелы в вертикальной и горизонтальной . плоскостях и сокращения продолжительности обработки каждого дерева за счет этого фактора.
Цель изобретения - расширение технологических возможностей и повышение производительности за счет увеличения зоны обработки штабеля с одной рабочей позиции и совмещения операций поворота стрелы в горизонтальной и вертикальной плоскостях.
Поставленная цель достигается тем, что в известной сучкорезной машине система управления снабжается дополнительно датчиком рабочего положения стрелы при ее повороте вправо в горизонтальной плоскости, реле времени и блокировкой каналов управления поворотом стрелы в горизонтальной и вертикальной плоскостях.
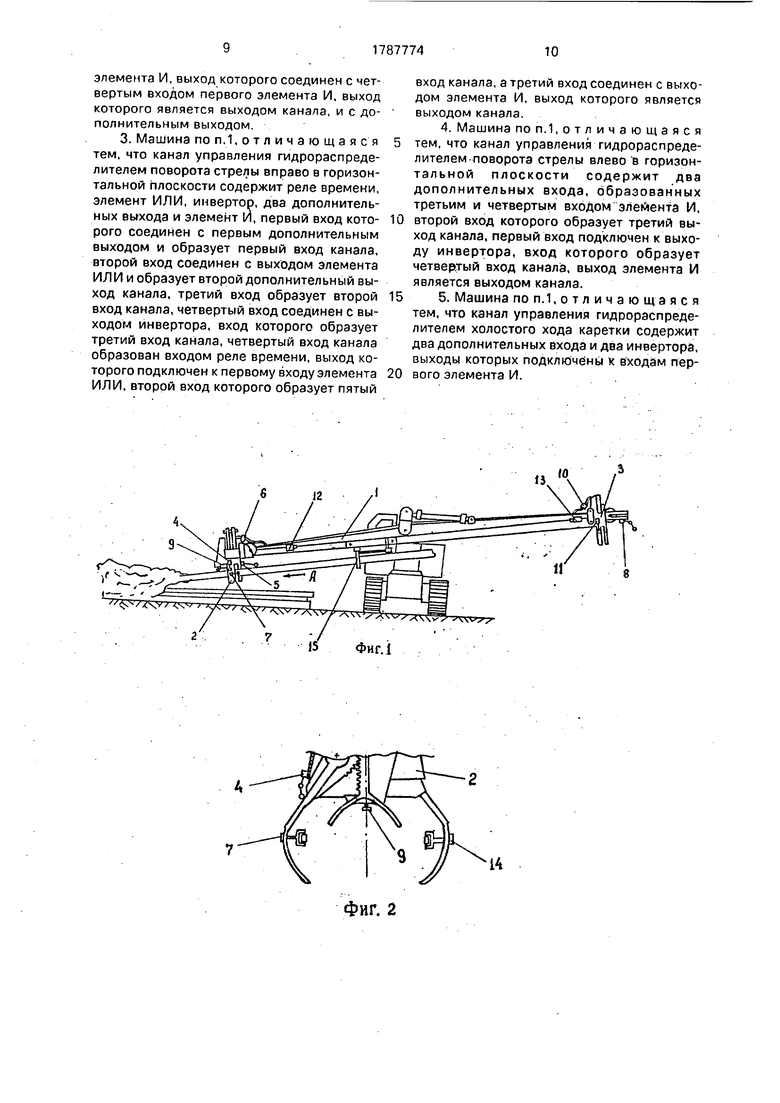
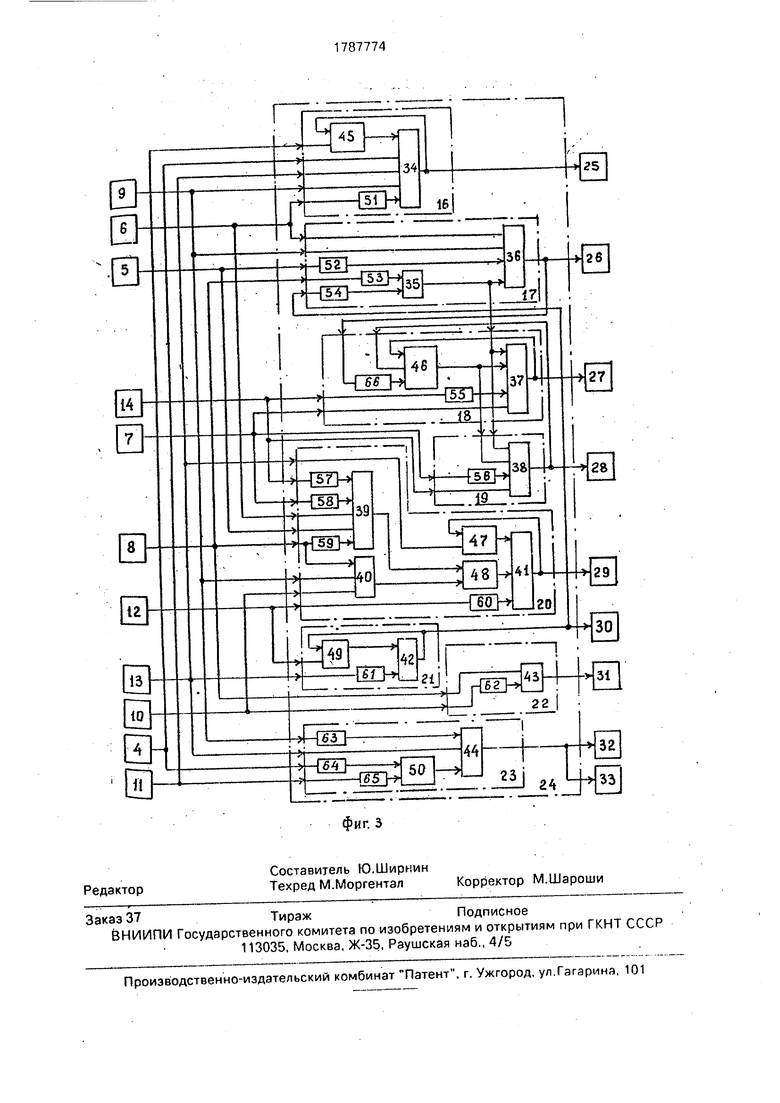
Нафиг.1 показана сучкорезная машина, общий вид; на фиг.2 - вид А по фиг.1; на фиг.З- структурная схема системы управления.
Машина содержит поворотную стрелу 1 с закрепленной на одном ее конце сучкорезной головкой 2 и установленной на другом ее конце приемной головкой 3.
Устройство снабжено датчиками 4.„14, расположенными на сучкорезной и прием-; ной головках и на самой стреле, по которой с помощью протаскивающего механизма перемещается каретка 15. Связанные сдатчиками каналы 16.„23 системы управления располагаются на пульте 24, их выходы соединены с гидрораспределителями 25.„33.
Схемы каналов системы управления содержат одиннадцать элементов И 34.„44, шесть элементов ИЛИ 45...50, пятнадцать элементов НЕ 51...65 и реле времени 66.
Канал 16 управляет гидрораспределителем 25 закрытия ножей сучкорезной головки, канал .17 - гидрораспределителей 26 поворота стрелы в вертикальной плоскости, каналы 18 и 19 - гидрорспределителями 27 и 28 поворота стрелы в горизонтальной плоскости соответственно вправо и влево. Канал управления движением каретки 15 состоит из двух схем - 20 и 21, которые управляют гидрораспределителями 29 и 30
соответственно холостого и рабочего ходов .каретки. Канал 22 управляет гидрораспределителем 31 закрытия ножей приемной головки, канал 23 - гидрораспределителями 32 и 33 раскрытия ножей сучкорезной и при0 ёмной головок.
На сучкорезной головке 2 установлены датчик 4 исходного положения раскрытых ножей, датчик 5 рабочего положения стрелы в вертикальной плоскости, датчики 7 и 14
5 рабочего положения стрелы в горизонтальной плоскости датчик 6 предельного давления в гидроцилиндре ножей, датчик 9 наличия дерева.
На приемной головке 3 установлены
0 датчик 8 наличия дерева, датчик 10 предельного давления в гидро цилиндре ножей, датчик 11 исходного положения раскрытых ножей.
На стреле 1 установлены датчики край5 него заднего (левого) 12 и крайнего переднего (правого) 13 положений каретки.
Устройство работает следующим образом.
Рабочие органы устанавливают в на0 чальное положение, ножи сучкорезной 2 и приемной 3 головок должны быть раскрыты, а каретка 15 находится в крайнем правом положении, при этом срабатывают датчики 4,11 и 13. Сигналы датчиков 11 и 13 и сигнал
5 датчика 4 через элемент ИЛИ 45 поступают на вход элемента И 34 канала 16, подготавливая его к включению.
Путем поворота ручным управлением стрелы 1 в вертикальной и горизонтальной
0 плоскостях сучкорезная головка 2 наводится на дерево, при соприкосновении ее с комлем дерева срабатывает датчик 9, сигнал которого подготавливает, к включению элементы И-36 канала 17 и И 40 канала 20,
5 открывает элемент И 34 и через него включает гидрораспределитель 25 закрытия ножей сучкорезной головки 2. Одновременно сигнал с выхода элемента И 34 поступает на вход элемента ИЛИ 45, запоминая сигнал
0 датчика 4, который прекращает его подачу при отходе ножей сучкорезной головки 2 от исходного раскрытого положения. При срабатывании датчиков 7 или 14 их сигналы подготавливают к включению от сигнала ре5 ле 66 элементы соответственно И 37 или И 38.
При достижении предельного (заданного) давления в гидроцилиндре сучкорезной головки 2 срабатывает датчик 6, сигнал которого подготавливает к включению элемент И 39, через элемент НЕ 51 отключает элемент И 34, прекращая дальнейший зажим комля дерева, открываем элемент И 36 и через него включает гидр ораспрсделитель 26 поворота стрелы и вертикальной плоскости и реле времени 66 схемы 18.
После заданного интервала времени сигнал реле 66через элемент ИЛИ 46 открывает элемент И 37 или И 38. которые подготовлены к включению сигналами датчиков 7 или 14. Если комель дерева находится слева от оси стрелы, то срабатывает датчик 7, сигнал которого открывает элемент И 37 и через него включает гидрораспределитель 27 поворота стрелы вправо в горизонтальной плоскости, а через элемент НЕ 56 закрывает элемент И 38. Если комель дерева находится справа от оси стрелы, то срабатывает датчик 14, сигнал которого открывает элемент И 38 и через него включает гидрораспределитель 28 поворота стрелы влево в горизонтальной плоскости, а через элемент НЕ 55 закрывает элемент И 37, Таким образом, через определенный интервал времени происходит одновременный поворот стрелы в вертикальной и горизонтальной плоскости вправо или влево. Сигналы датчиков 14 и 7 через элементы НЕ 57 и НЕ 58 закрывают элемент И 39, а сигнал с выходов элементов И 37 и И 38 поступают на вход элемента ИЛИ 46, запоминая сигнал реле времени 66.
После того, как угол между осями дерева и стрелы 1 в вертикальной плоскости достигнет заданного значения срабатывает датчик 5, сигнал которого подготавливает или открывает элемент И 39, если угол между осями дерева и стрелы в горизонтальной плоскости достиг заданного значения, а через элемент НЕ 52 закрывает элемент И 36, прекращая поворот стрелы в вертикальной плоскости.
Если угол между осями дерева и стрелы в горизонтальной плоскости достигнет заданного значения, то отключаются датчики 7 и 14 и закрывают элементы И 38 и И 37, прекращая поворот стрелы в горизонтальной плоскости, а через элементы НЕ 58 и НЕ 57 подготавливают или открывают элемент И 39, если угол между осями дерева и стрелы в вертикальной плоскости достиг заданного значения.
После окончания центровки открывается элемент И 39, сигнал которого через элемент ИЛИ 48 поступает на вход элемента И 41, который открывается, если с датчика 13 через элемент ИЛИ 47 поступает сигнал о нахождении каретки 15 в правом переднем положении. С зыхода открытого элемента И 41 поступает сигнал на включение гидрораспределителя 29 холостого хода каретки и одновременно на вход элемента ИЛИ 47, запоминая сигнал датчика 13, который прекращает его подачу при отходе каретки 15 из крайнего переднего положения.
В момент прихода каретки 15 в крайнее левое (заднее) положение срабатывает датчик 12, сигнал которого через элемент НЕ 60 последовательно закрывает элементы И 41
0 и ИЛИ 47 (память), прекращая холостой ход каретки, а через элемент ИЛИ 49 открывает элемент И 42 и через него включает гидрораспределитель. 30 рабочего хода каретки 15. Одновременно сигнал с выхода элемен5 та И 42 поступает на вход элемента ИЛИ 49, запоминая сигнал датчика 12, который прекращает его подачу при отходе каретки 15 из левого (заднего) положения, через элемент НЕ 54 размыкает цепи элементов И 35.
0 И 36, И 37 и И 38, обеспечивая защиты каналов 17, 18 и 19 поворота стрелы в вертикальной и горизонтальной плоскостях от случайных срабатываний датчиков при рабочем ходе каретки 15.
5При рабочем перемещении каретки вперед, когда комель дерева попадает в приемную головку, срабатывает датчик 8, сигнал которого открывает элемент И 43 и через него включает гидрораспределитель 31 за0 крытия ножей приемной головки. Одновременно сигнал датчика 8 через элемент Н Е 59 закрывает элемент И 39. прекращая действие датчиков 5,6,7 и 14 на холостой ход каретки 15 и подготавливает элемент И 40 к
5 включению его от датчика 10.
При достижении кареткой 15 правого переднего положения срабатывает датчик 13, который через элемент НЕ 61последова- тельнр отключает элементы И 42 и ИЛИ 49
0 (память), прекращая рабочий ход каретки 15, а через элемент ИЛИ 47 готовит к включению элемент И 41.
При достижении через некоторое время заданного давления в гидроцилиндре при5 емкой головки 3 срабатывает датчик 10, сигнал которого через элемент НЕ 62 отключает элемент И 43, прекращая закрытие ножей приемной головки 3, и одновременно открывает элемент И 40, если на него
0 поданы сигналы датчиков 8и9 наличия ствола дерева в приемной 3 и сучкорезной 2 головках. Сигнал с выхода элемента И 40 через элемент ИЛИ 48 открывает элемент И 41, который снова включает гидрораспреде5 литель 29 холостого хода каретки 15. Начинается новый цикл перемещения каретки, управляемый только датчиками 12 и 13.
Во время очередного рабочего хода каретки 15 в момент выхода ствола из сучкорезной гол- эки 2 отключается датчик 9,
который последовательно размыкает цепи элементов И 40, ИЛИ 48 и И 41, исключая последующий холостой ход каретки от сигнала датчика 13, размыкает цепи элементов И 34 и И 36 и через элемент НЕ 63 готовит к включению элемент И 44.
При достижёйии кареткой 15 правого (переднего) положения срабатывает датчик 13, сигнал которого через элемент И 44 включает гйдрораспределители 32 и 33 раскрытия ножей сучкорезной 2 и приемной 3 голово к, а через элемент НЕ 61 закрывает элемент И 42, прекращая рабочий ход каретки. При достижении ножами сучкорезной 2 и приемной 3 головок исходных (раскрытых) положений срабатывают датчики 4 и 11 сигналы которых через элементы НЕ 65 и ИЛИ 50 закрывают элемент И 44, прекращая раскрытие ножей сучкорезной 2 и приемной 3 головок. Одновременно датчики 9, 13,4 и 11 подготавливают начальное положение элемента И 34. Машина готова к обработке очередного дерева.
Таким образом, предлагаемая машина обеспечивает расширение зоны обработки штабеля с одной рабочей позиции за счет дополнительной автоматизации операции поворота стрелы вправо в горизонтальной плоскости, одновременное выполнение бпе- раций поворотов стрелы в вертикальной и горизонтальной плоскостях, а также исключение влияния случайных помех, вызывающих ложное срабатывание датчиков, при обрезке сучьев в автоматическом режиме, что приводит к повышению производительности.
Формула изобретения
1. Сучкорезная машина, содержащая поворотную в горизонтальной и вертикальной плоскости стрелу с сучкорезной головкой на одном конце, приемной головкой на другом и направляющими, в которых установлена каретка с захватом, гидроцилиндры поворота стрелы в горизонтальной и вертикальной плоскостях и ножей сучкорезной и приемной головок, гидромотор механизма перемещения каретки, с гидрораспределителями, а также систему управления, имеющую датчики давления в гидроцилиндрах ножей сучкорезной и приемной головок, датчики исходного положения ножей и наличия дерева в сучкорезной и приемной головках, датчики рабочего положения стрелы в вертикальной и горизонтальной плоскостях и крайних положений каретки, выходы которых подключены к входам управления соответствующих гидрораспределителей, отличающаяся тем,
что. с целью расширения технологических возможностей и повышения производительности за счет увеличения зоны обработки штабеля с одной рабочей позиции и
. совмещения операций поворота стрелы в горизонтальной и вертикальной плоскостях, система управления снабжена дополнительным датчиком рабочего положения стрелы при ее повороте вправо в горизон0 тальной плоскости, реле времени и блокировкой каналов управления поворотом стрелы в вертикальной и горизонтальной плоскостях, причем соответствующий вход канала управления гидрораспределителем
5 закрытия ножей соединен с датчиком предельного давления в гидроцилиндре ножей сучкорезной головки, канал управления гидрораспределителем поворота стрелы в вертикальной плоскости имеет два
0 дополнительных входа, к которым подключены датчик наличия дерева в приемной головке и выход канала рабочего перемещения каретки, и дополнительный выход, который соединен с первым входом
5 канала управления гидрораспределителем поворота стрелы вправо, к четырем входам которого подключены соответственно выходы каналов управления поворотом стрелы влево в горизонтальной и в вертикальной
0 плоскостях, датчики рабочего положения стрелы в горизонтальной плоскости после ее поворота влево и вправо, к двум дополнительным выходам подключены первый и второй входы канала управления гидрорас5 пределителем поворота стрелы влево, к третьему и четвертому входам которого подключены соответственно датчики рабочего .положения стрелы в горизонтальной плоскости после ее поворота вправо и влево,
0 первый канал управления гидрораспределителями каретки имеет два дополнительных входа, первый дополнительный вход соединен с датчиком рабочего положения стрелы после ее поворота влево, второй до5 полнительный вход соединен с датчиком давления в гидроцилиндре ножей сучкорез- ной головки.
2. Машина по п.1,отличающаяся тем, что канал управления гидрораспреде0 лителем поворота стрелы в вертикальной плоскости содержит два дополнительных входа, дополнительный выход выполнен в виде двух элементов И и трех инверторов, три основных-входа канала образованы дву5 мя входами первого элемента И и входом первого инвертора, выход которого подключен к третьему входу первого элемента И, дополнительные входы канала образованы входами второго и третьего инверторов, выходы которых подключены к входам второго
элемента И, выход которого соединен с четвертым входом первого элемента И, выход которого является выходом канала, и с до- полнительным выходом.
3. Машина по п. 1, о т л и ч а ю щ а я с я тем, что канал управления гмдрораспреде- лителем поворота стрелы вправо в горизонтальной плоскости содержит реле времени, элемент ИЛИ, инвертор, два дополнительных выхода и элемент И, первый вход кото- рого соединен с первым дополнительным выходом и образует первый вход канала, второй вход соединен с выходом элемента ИЛ И и образует второй дополнительный выход канала, третий вход образует второй вход канала, четвертый вход соединен с выходом инвертора, вход которого образует третий вход канала, четвертый вход канала образован входом реле времени, выход которого подключен к первому входу элемента ИЛИ, второй вход которого образует пятый
вход канала, а третий вход соединен с выходом элемента И, выход которого является выходом канала.
4. Машина по п.1,отличающаяся тем, что канал управления гидрораспределителем-поворота стрелы влево в горизонтальной плоскости содержит два дополнительных входа, образованных третьим и четвертым входом элемента И, второй вход которого образует третий выход канала, первый вход подключен к выходу инвертора, вход которого образует четвертый вход канала, выход элемента И является выходом канала.
5. Машина по п.1, о т л и ч а ю щ а я с я тем, что канал управления гидрораспределителем холостого хода каретки содержит два дополнительных входа и два инвертора, выходы которых подключены к входам первого элемента И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сучкорезная машина | 1987 |
|
SU1412957A1 |
| Сучкорезно-раскряжевочная машина | 1987 |
|
SU1684055A1 |
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| МАНИПУЛЯТОР УНИВЕРСАЛЬНЫЙ ДЛЯ ДРЕВЕСНОГО СЫРЬЯ | 2004 |
|
RU2258598C1 |
| МАНИПУЛЯТОР УНИВЕРСАЛЬНЫЙ ДЛЯ ДРЕВЕСНОГО СЫРЬЯ | 2005 |
|
RU2299119C1 |
| Сучкорезный орган | 1981 |
|
SU1038231A1 |
| Лесозаготовительная машина | 1985 |
|
SU1429988A1 |
| УСТАНОВКА РАСКРЯЖЕВОЧНАЯ МНОГОПИЛЬНАЯ | 2004 |
|
RU2255855C1 |
| Захватно-сучкорезная головка | 1985 |
|
SU1261796A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1991 |
|
RU2027346C1 |
Изобретение относится к лесной промышленности и может быть применено для обрезки сучьев с поваленных деревьев. Цель изобретения - повышение надежности и производительности. Машина содержит поворотную в горизонтальной и вертикальной плоскостях стрелу с закрепленными на ее противоположных концах сучкорезной головкой и приемной головкой. На стреле имеются направляющие, в которых установлена каретка. Машина имеет гидроцилиндры поворота стрелы в вертикальной и горизонтальной плоскостях, ножей сучкорезной- и приемной головок, гидромото р механизма перемещения каретки. На входы каналов управления подключены датчик наличия дерева в1 сучкорезной головке, два датчика предельного давления в гидроцилиндрах ножей соответственно сучкорезной и приемной головок, два датчика исходного положения ножей соответственно сучкорезной и приемной головок, датчик рабочего положения стрелы в вертикальной плоскости, два датчика рабочего положения стрелы в горизонтальной плоскости. Оператор осуществляет захват комля, лежащего в штабеле дерева, сучкорезной головкой. Далее система управления обеспечивает полностью автоматический цикл обработки данного дерева, 4 з.п. ф-лы, 3 ил. СО С
ФИГ. 2
| Сучкорезная машина | 1987 |
|
SU1412957A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
