(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Сучкорезная машина | 1987 |
|
SU1412957A1 |
| Сучкорезная машина | 1990 |
|
SU1787774A1 |
| Грузоподъемное устройство | 1988 |
|
SU1648889A1 |
| Сучкорезно-раскряжевочная машина | 1987 |
|
SU1684055A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| Лесозаготовительная машина | 1990 |
|
SU1824098A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2127038C1 |
| СПОСОБ НАПРАВЛЕННОЙ ВАЛКИ ДЕРЕВЬЕВ | 2013 |
|
RU2540544C2 |
| Лесозаготовительная машина | 1987 |
|
SU1442134A1 |
| Лесозаготовительная машина | 1988 |
|
SU1782465A1 |
Использование: изобретение относится к лесозаготовительной технике. Сущность изобретения: заключается в том, что устройство содержит на самоходном шасси полноповоротную платформу, на которой расположены двигатель, гидравлическое оборудование, кабина оператора и манипулятор, включающий стрелу, рукоять и ЗСУ. Машина оборудуется датчиками давления в гидросистемах управления, стрелой и захватами ЗСУ, датчиками положения платформы, рукояти, стойки ЗСУ и пильного аппарата, которые вместе е устройством управления, содержащим элементы ИЛИ, НЕ и И и реле времени, обеспечивают автоматическое управление процессом валки деревьев с момента наведения ЗСУ на дерево до момента укладки его в пачку. 6 з.п. ф-лы, 4 ил.
Изобретение относится к лесозаготовительному оборудованию и может быть использовано в лесной промышленности при проведении сплошных рубок на лесосеках с уклоном не более 8°.
Цель изобретения - упрощение конструкции, монтажа и обслуживание системы управления, уменьшение массы машины.
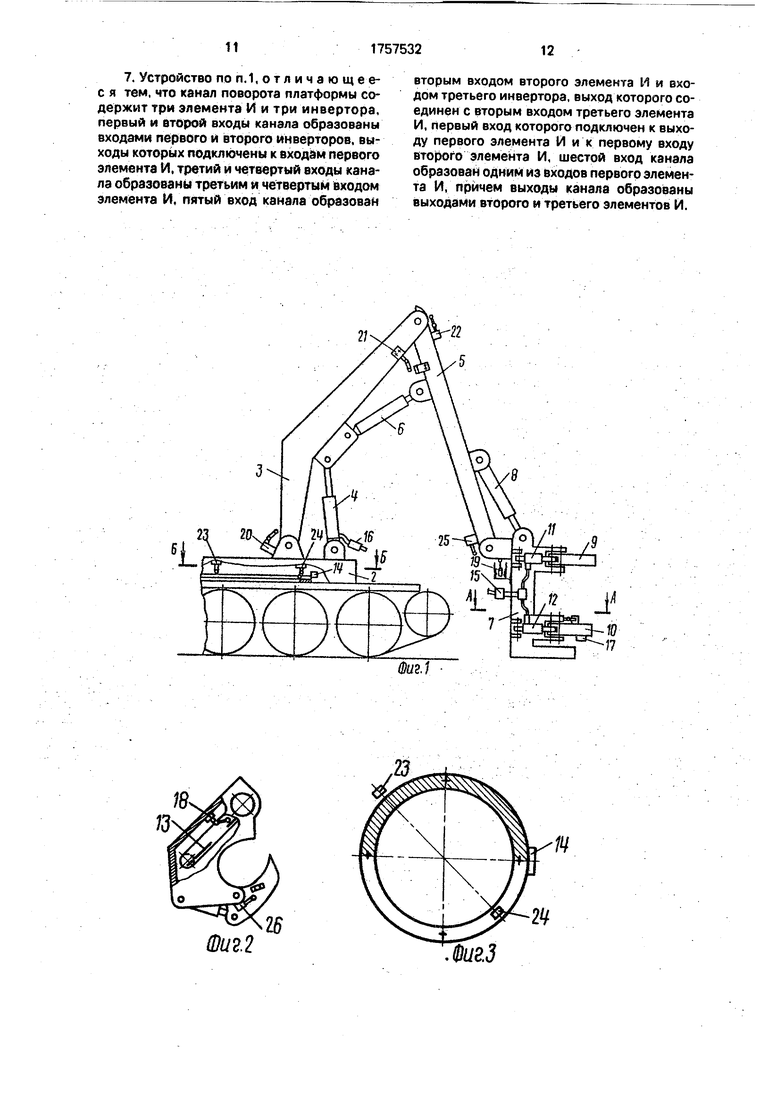
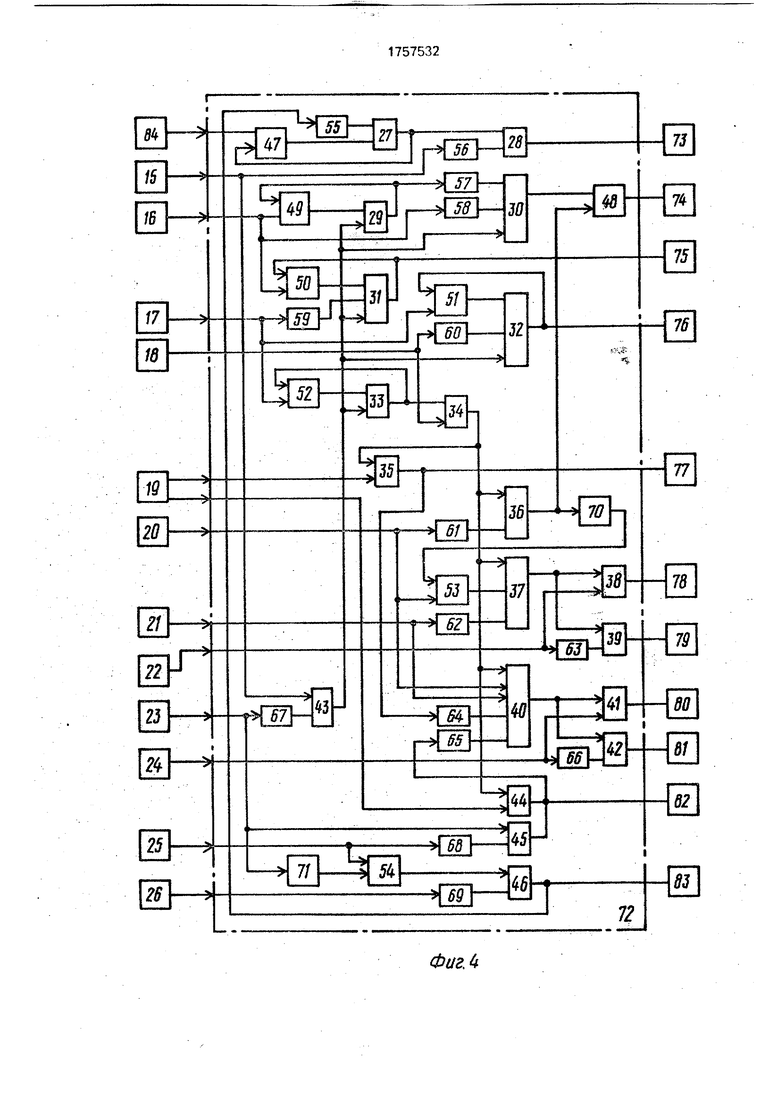
На фиг.1 показана лесозаготовительная машина; на фиг.2 - вид А по фиг.1; на фиг.З - вид Б по фиг.1; на фиг.4 - схема автоматизированного устройства управления гидрораспределителями.
Лесозаготовительная машина включает самоходное шасси 1, на котором установлена полноповоротная платформа 2 с двигателем, гидросистемой и кабиной оператора (на фиг.1 не показаны). На поворотной платформе шарнирно установлена стрела 3, управляемая гидроцилиндром 4. На конце стрелы также шарнирно установлена рукоять 5, поворот которой осуществляется от гидроцилиндра 6. На конце рукояти также шарнирно укреплена стойка захватно-сре- зающего устройства (ЗСУ) 7, привод которой осуществляется от гидроцилиндра 8. Стойка оборудуется захватами 9 и 10, которые открываются и закрываются при помощи гидроцилиндров 11 и 12. В нижней части стойки располагается короб, в котором находится пильный аппарат с магнитами 13, установленными на пильной шине и корпусе ведомой звездочки. На шасси машины устанавливается съемное двухступенчатое кольцо С упором 14.
Лесозаготовительная машина снабжена датчиками: давления в гидромагистралях управления захватами ЗСУ 15 и стрелы 16; конечного положения 17 и исходного положения 18 пильной шины; углового положения стойки относительно вертикали 19; положений рукояти относительно стрелы 21
VI
СП
VI
ел
CJ
ю
и 22; положения поворотной платформы относительно шасси 23 и 24; положения стойки ЗСУ относительно рукояти 25, положения раскрытых захватов ЗСУ 26.
Двадцать логических элементов И - 27,28,29,30,31,32,33,34,35,36,37,38,39,40,41, 42,43,44,45,46; восемь логических элементов ИЛИ - 47,48,49,50,51,52,53,54; пятнадцать логических элементов НЕ - 55,56,57,58,59,60,61,62,63,64,65,66,67,68,69 и два реле времени 70,71 составляют устройство управления 72.
Гидросистема оборудована гидрораспределителями, которые управляют приводами: закрытия захватов ЗСУ 73; поворота стрелы 74; пильного аппарата м его подачи 75; возврата пильного аппарата 76; поворота стойки ЗСУ на уменьшение угла между осью дерева и рукоятью 77; рукояти на уменьшение угла между осями стрелы и рукояти 79; поворота платформы влево 80; поворота платформы вправо 81; поворота стойки ЗСУ на увеличение угла между осью дерева и рукоятью 82; открытия захватов ЗСУ 83.
Пуск устройства управления осуществляется с пульта 84,
Устройство работает следующим образом.
Для работы по принятой технологии устанавливающей определенный угол укладки пачек к оси разрабатываемой ленты двухступенчатое кольцо с упором 14 устанавливается на шасси, таким образом, чтобы, предполагаемая ось пачки совпадала с границей ступени кольца и проходила через середину упора, располагающегося в передней части шасси. Двухступенчатое кольцо фиксируется в этом положении (например, болтами).
Датчики положения поворотной платформы устанавливаются на ней по оси манипулятора, причем датчик 23 в передней части, таким образом, чтобы при повороте платформы было воздействие на него упора 14, а датчик 24 в задней части над двухступенчатым кольцом, таким образом, чтобы было воздействие на него в верхней ступени. Ручным управлением платформы 2, стрелой 3. рукоятью 5 и стойкой 7 верхними и нижними захватами 9. 10 ЗСУ наводится на дерево. После касания стойки 7 комля дерева с пульта управления 84 (например, кнопкой Пуск) по дается кратковременный сигнал на первый вход элемента ИЛИ 47 устройства управления 72.
Элемент ИЛИ 47 открывает элемент И 27, сигнал с выхода которого поступает: на второй вход элемента ИЛИ 47, который запоминает сигнал с пульта управления 84;
открывает элемент И 28, который включает гидрораспределитель 73 гидроцилиндров 11 и 12 закрытия захватов 9 и 10 ЗСУ.
После закрытия ЗСУ при достижении
заданной величины давления в гидромагистрали привода захватов 9 и 10 срабатывает датчик 15, сигнал которого: через элемент НЕ 56 закрывает элемент И 28, прекращая зажим дерева; открывает элемент И 43, сиг0 нал с выхода которого через элемент И 30 и ИЛИ 48 включает гидрораспределитель 74 привода поворота стрелы 3, которая создает усилие натяга, приложенного к стволу дерева; подготавливает к включению элемен5 ты И 29, И 31, И 32 и И 33. При достижении заданной величины давления в гидромагистрали привода стрелы, пропорциональной усилию натяга, срабатывает датчик 16 , сигнал которого: через элемент НЕ 58 за0 крывает элемент И 30, прекращая увеличение давления, создающего натяг ; через элемент ИЛИ 50 открывает элемент И 31, сигнал с выхода которого включает гидрораспределитель 75 привода и подачи пиль5 ного аппарата и одновременно через элемент ИЛИ 50 запоминает сигнал датчика 16; через элемент ИЛИ 49 открывает элемент И 29, сигнал с выхода которого через элемент НЕ 57 вторично отключает элемент
0 И 30, исключая его открытие при отсутствии сигнала датчика 16 после отделения дерева от пня, а через элемент ИЛИ 49 запоминает сигнал датчика 16. В начале подачи пильного аппарата срабатывает датчик 18, сигнал
5 которого через элемент НЕ 60 подготавливает к включению элемент И 32 и снимает сигнал со второго входа элемента И 34. После перерезания пильной шиной большинства волокон комля ствол дерева
0 подскакивает вверх за счет усилия натяга, в гидромагистрали привода стрелы происходит уменьшение давления, и датчик 16 возвращается в исходное положение, снимая сигнал со входов элементов ИЛИ 49,
5 ИЛИ 50, которые не отключаются из-за действия обратных связей - сигналов с выходов элементов И 29 и И 31. В момент срезания пильным аппаратом последних волокон комля дерева срабатывает датчик 17 (напри0 мер, магнитоуправляемый контакт, или микросхема К1116, срабатывающие от магнита 13), сигнал которого: через элемент НЕ 59 закрывает элемент И 31, которыи прекраща- ет подачу пильного аппарата и отключает
5 элемент ИЛИ 50; через элемент ИЛИ 51 открывает элемент И 32, сигнал с выхода которого включает гидрораспределитель 76 возврата пильного аппарата в исходное положение; через элемент ИЛИ 52 открывает элемент И 33, сигнал с выхода которого подготавливает к включению элемент И 34 от датчика 18. Одновременно сигнал с выходов элементов И 32 и И 33, поступая на первые входы элементов ИЛИ 51 и ИЛИ 52, соответственно, запоминают кратковременный сигнал датчика 17, который примет исходное положение при возврате пильного аппарата.
При достижении пильным аппаратом исходного положения срабатывает датчик 18, сигнал которого: через элемент НЕ 60 закрывает элемент И 32, прекращая возврат пильного аппарата и открывает элемент И 34. Сигнал с выхода элемента И 34 подготавливает к включению элементы И 35, И 36, И 37, И 40, И 44.
Направление поворота стойки ЗСУ задается датчиком - маятником 19, сигнал с первого выхода которого через элемент И 35 включает гидрораспределитель 77 на уменьшение угла между стойкой и рукоятью, а сигнал со второго выхода через элемент И 44 включает гидрораспределитель 82 на увеличение угла.
Если ось срезанного дерева находится в заданном угловом положении относительно вертикали (0...100, например, для машины ЛП-19), то сигналов с датчика 19 на элементы И 35 и И 44 не поступает.
Если в момент возвращения пильного аппарата в исходное положение, стрела 3 не находится в заданном положении (при котором происходит укладка деревьев в пачку), то сигнал датчика 20 через элемент НЕ 61, И 36 и ИЛИ 48 повторно включает гидрорас- пределитель 74 поворота стрелы на подъем дерева. Сигнал с выхода элемента И 36 включает реле времени 70, сигнал которого после заданного интервала, через элемент ИЛИ 53 откроет элемент И 37, сигнал с вы- хода которого подается на первые входы элементов И 38, И 39, срабатывающие от сигнала датчика 22. Если в этот момент рукоять относительно стрелы не находится в заданном положении (при котором происхо- дит укладка деревьев в пачку), то сигнал с выхода датчика 22 через элемент И 38 включает гидрораспределитель 78 на уменьшение угла между рукоятью и стрелой, либо через элементы НЕ 63 и И 39 включает гид- рораспределитель 79 на увеличение этого угла. Таким образом, происходит одновременный поворот стрелы 3, рукояти 5 и стойки 7.
При заданном положении стрелы 3 ера- батывает датчик 20, сигнал которого: подготавливает к включению элемент И 40; через элемент НЕ 61 закрывает элемент И 36, который через элемент ИЛИ 48 прекращает поворот стрелы и отключает реле времени
70; через элемент ИЛИ 53 открывает элемент И 37, сигнал которого, открывая элемент И 38 или И 39, включает гидрораспределитель 78 или 79 поворота рукояти 5, если она не заняла заданное положение после окончания интервала, заданного реле времени.
При достижении рукоятью 5 заданного положения относительно стрелы 3 срабатывает датчик 21, сигнал которого через элемент НЕ 62 закрывает элемент И 37 и соответственно элементы И 38 и И 39, прекращая поворот рукояти; открывает элемент И 40, если стрелы и рукоять находятся в заданном (для пакетирования) положении и не происходят повороты стойки относительно рукояти, сигнал с выхода которого открывает элемент И 41 или И 42 в зависимости от сигнала датчика 24.
Продольная ось пачки делит зону действия манипулятора на два сектора. После срезания дерева стрела, как правило, находится в одном из этих секторов. Поэтому поворот стрелы на угол меньше 180° для укладки дерева в пачку должен выполняться в пределах этого сектора. Направление поворота стрелы в горизонтальной плоскости определяет датчик 24 в зависимости от его положения в том или ином секторе (на верхней или нижней дорожке двухступенчатого кольца). Первоначально, это положение задается во время установки двухступенчатого кольца с упором. Предположим, что для укладки очередного дерева стрела должна поворачиваться влево (по отношению к оператору). При этом, сигнал датчика 24 откроет элемент И 41, сигнал с выхода которого включает гидрораспределитель 80 привода поворота платформы 2 влево. Если стрела 3 должна поворачиваться вправо, то сигнал датчика 24 через элемент НЕ 65 откроет элемент И 42, сигнал с выхода которого включает гидрораспределитель 81 привода поворота платформы вправо.
Причем, поворот платформы 2 происходит при условиях: давление в гидроцилиндрах 11 и 12 захватов 9 и 10 ЗСУ заданное; пильный аппарат находится в исходном положении; стойка 7 ЗСУ, стрела 3 и рукоять 5 находится в заданном положении, т.е. сигнал элемента И 40 поступает на первые входы элементов И 41, И 42.
При достижении платформой 2 заданного положения для укладки деревьев срабатывает датчик 23, сигнал которого: через элементы НЕ 67, И 43 закрывает элементы И 29, И 30, И 31, И 32, И 33, И 34, И 36, И 37. И 40, И 44, прекращая поворот платформы; открывает элемент И 45, который включает гидрораспределитель 82 поворота стойки 7 ЗСУ на увеличение угла между осью дерева
и рукоятью 5. Происходит наклон дерева для его укладки в пачку. Датчик 23 включает также реле времени 71, сигнал с выхода которого после заданного интервала времени, через элемент ИЛИ 54 откроет элемент И 46.
Сигнал с выхода элемента И 46 включает гидрораспределитель приводов 83 открытия захватов 9 и 10 ЗСУ и одновременно через элемент НЕ 55 закрывает элементы И 27 и соответственно И 28, управляющий закрытием захватов ЗСУ.
При достижении стойкой 7 заданного положения относительно рукояти 5 срабатывает датчик 25, сигнал которого через элемент НЕ 68 закрывает элемент И 45; через элемент ИЛИ 54 открывает элемент И 46, сигнал с выхода которого включает гидрораспределитель 83, если захваты 9 и 10 ЗСУ не пришли в исходное положение во время заданного интервала.
При достижении захватами 9 и 10 ЗСУ исходного положения срабатывает датчик 26, сигнал которого через элемент НЕ 69 закрывает элемент И 46, прекращая открытие захватов, а через элемент НЕ 55 подготавливает к открытию элемент И 27 от сигнала с пульта управления 84,
Формула изобретения 1. Устройство управления лесозаготовительной машиной, включающее олектроуп- равляемые распределители гидродвигателей стрелы, рукояти, захватно-срезающего устройства, поворотной платформы, каналы управления распределителями, входы которых связаны с датчиками положения стрелы, рукояти, захватно-срезающего устройства, пильной шины, платформы, давления в гидроцилиндрах захватов, стрелы и пультом управления, а выходы - с входами управления соответствующих распределителей, отличающееся тем, что, с целью упрощения конструкции, устройство снабжено датчиками давления в гидроцилиндрах захватов захватно-срезающего устройства и стрелы, конечного и исходного положения пильной шины, положения стойки захватно-срезающего устройства относительно вертикали, положения стрелы относительно платформы, исходного положения рукояти и положе- ния рукояти относительно стрелы, заданного положения платформы при укладке деревьев в пачку и положения платформы относительно шасси, датчик положения стойки захватно-срезающего устройства относительно рукояти, датчик исходного положения захватов, к первому входу канала управления гидрораспределителями открытия и закрытия захватов подключен пульт управления, к второму - датчик давления в гидроцилиндрах захватов, к третьему - датчик исходного положения захватов, к четвертому - датчик заданного положения платформы, к пятому - датчик положения стойки захватно-срезающего устройства относительно рукояти, к первому входу канала управления гидрораспределителем поворота стрелы подключен датчик
0 давления в гидроцилиндре стрелы, второй вход связан с выходом включения привода стрелы канала управления гидрораспределителями захватов, а третий вход - с выходом выключения привода стрелы канала
5 управления гидрораспределителями поворота рукояти, к первому входу канала управления гидрораспределителями подачи и возврата пильной шины подключен датчик давления в гидроцилиндре стрелы, к второ0 му - датчик конечного положения пильной шины, к третьему - датчик исходного положения пильной шины, четвертый вход связан с выходом включения привода стрелы канала управления гидрораспределителями
5 захватов, к первому и второму входу канала управления гидрораспределителями поворота стойки захватно-срезающего устройства на уменьшение и увеличение угла между осью дерева и рукоятью подключен соответ0 ственно первый и второй выход датчика положения стойки относительно вертикали, к третьему - датчик заданного положения платформы, к четвертому - датчик положения стойки относительно рукояти, пятый
5 вход связан с выходом выключения возврата пильной шины канала управления гидрораспределителями шины, к первому входу канала управления гидрораспределителями поворота рукояти на уменьшения и уве0 личения угла между осями стрелы и рукояти подключен датчик положения стрелы относительно платформы, к второму - датчик исходного положения рукояти, к третьему - датчик положения рукояти отно5 сительно стрелы, четвертый вход связан с выходом завыключения возвратно-пильной шины канала управления гидрораспределителями шины, первый и второй входы канала управления гидрораспределителями
0 поворотной платформы влево и вправо связаны соответственно с первым и вторым выходом канала управления гидрораспределителями поворота стойки захватно-срезающего устройства, к третьему входу подключен датчик поло5 жения стрелы относительно платформы, к четвертому-датчик исходного положения рукояти, к пятому - датчик положения платформы, Шестой вход связан с выходом выключения возврата пильной шины канала управления гидрораспределителями шины.
А. Устройство поп.1,отличающее- с я тем, что канал управления гидрораспределителями подачи и возврата пильной шины содержит четыре элемента И, три элемента ИЛИ и два инвертора, первый вход канала образован одним из входов первого элемента ИЛИ, выход которого связан с первым входом первого элемента И, второй вход канала образован входом первого инвертора и первыми входами второго и третьего элемента ИЛИ, выход которого подключен к первому входу второго элемента И, третий вход канала образован первым входом третьего элемента И и входом второго инвертора, выход которого связан с третьим входом второго элемента И, четвер5 тый вход канала образован вторыми входами первого, второго и четвертого элемента И, выход которого соединен с вторыми входами третьего элемента И и второго элемента ИЛИ, выход которого связан с первым
0 входом четвертого элемента И. причем первый выход канала образован вторым входом первого элемента ИЛИ и выходом первого элемента И, третий вход которого соединен с выходом первого инвертора,
5 второй выход канала - вторым входом третьего элемента ИЛИ и выходом второго элемента И, третий выход канала - выходом третьего элемента И.
0 первого и второго элементов И, причем выходы канала являются выходами первого и второго элементов И.
0 ИЛИ и входом первого инвертора, выход которого соединен с первым входом первого элемента И, второй вход канала образован входом второго инвертора, выход которого подключен к одному из входов вто5 рого элемента И, третий вход образован вторым входом третьего элемента И и входом третьего инвертора, выход которого со- единен с вторым входом четвертого элемента И, первый вход которого подклю0 чен к выходу второго элемента И и первому входу, третьего элемента И, четвертый вход образован вторыми выходами первого и второго элементов И. первый вход которого соединен с выходом элемента ИЛИ первый
5 вход которого подключен к выходу реле времени, причем первый выход канала образован входом реле времени и выходом первого элемента И, второй и третий выходы образованы выходами третьего и четвертого элементов И.
1В
(DU2.2
вторым входом второго элемента И и входом третьего инвертора, выход которого соединен с вторым входом третьего элемента И, первый вход которого подключен к выходу первого элемента И и к первому входу второго элемента И, шестой вход канала образован одним из входов первого элемента И, причем выходы канала образованы выходами второго и третьего элементов И.
7
22
Фиг.1
14
. Фаг. 3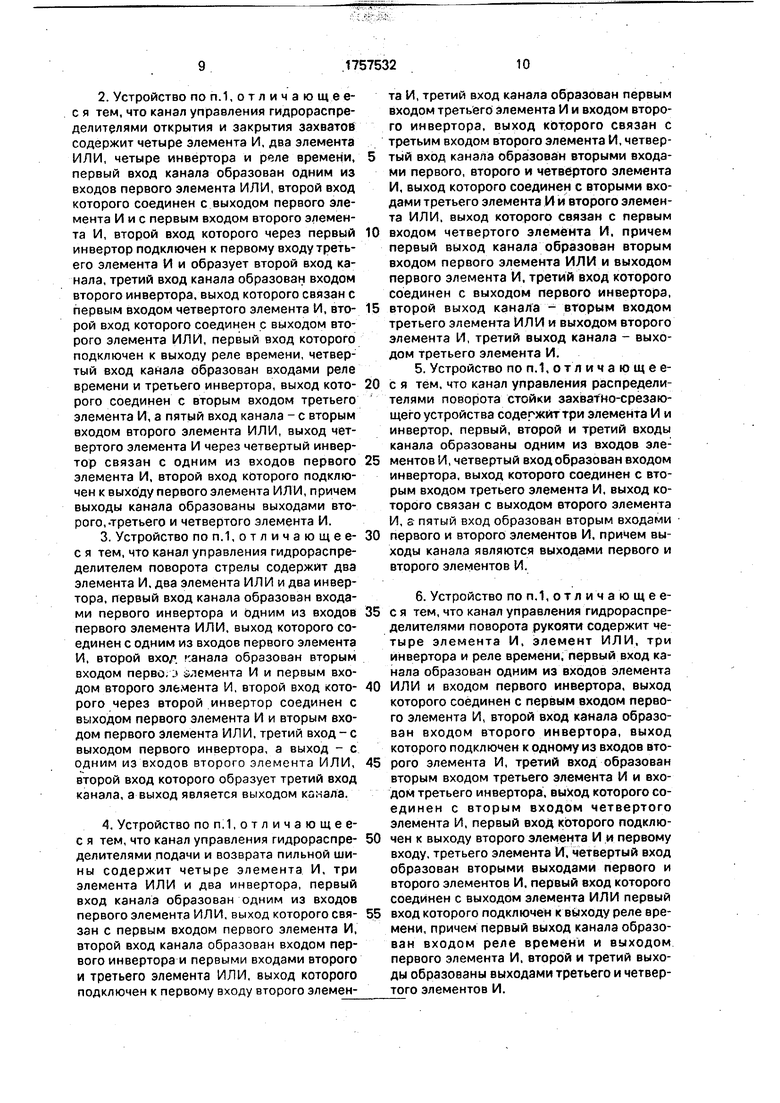
| Изыскания и исследование принципов и систем автоматизированного управления лесосечными машинами | |||
| Отчет № 78055236, ЦНИИМЭ, Химия, 1979. |
