сучкорезной головкой 2 и установленной-5 стрелы 1 в вертикальной и горизонт
на другом ее конце приемной головкой 3.
.Устройство снабжено датчиками 4-13, расположенными на сучкорезной и приемной головках и на самой стреле, по которой с помощью протаскивающего меха- 2о готавливает к включению элемент И 32 низма перемещается каретка 14. Связан- канала 16, открывает элемент И 31 и
тальной плоскостях сучкорезная головка 2 наводится на дерево, при соприкосновении ее с комлем дерева срабатывает датчик 9, сигнал которого под-
готавливает к включению элемент И 32 канала 16, открывает элемент И 31 и
тальной плоскостях сучкорезная головка 2 наводится на дерево, при соприкосновении ее с комлем дерева срабатывает датчик 9, сигнал которого под-

| название | год | авторы | номер документа |
|---|---|---|---|
| Сучкорезная машина | 1990 |
|
SU1787774A1 |
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| Сучкорезно-раскряжевочная машина | 1987 |
|
SU1684055A1 |
| МАНИПУЛЯТОР УНИВЕРСАЛЬНЫЙ ДЛЯ ДРЕВЕСНОГО СЫРЬЯ | 2004 |
|
RU2258598C1 |
| МАНИПУЛЯТОР УНИВЕРСАЛЬНЫЙ ДЛЯ ДРЕВЕСНОГО СЫРЬЯ | 2005 |
|
RU2299119C1 |
| Сучкорезный орган | 1981 |
|
SU1038231A1 |
| Захватно-сучкорезная головка | 1985 |
|
SU1261796A1 |
| Сучкорезная головка | 1979 |
|
SU829428A1 |
| Лесозаготовительная машина | 1985 |
|
SU1429988A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1991 |
|
RU2027346C1 |

Изобретение относится к лесной промышленности и может быть применено для обрезки сучьев с поваленных деревьев. Цель изобретения - повышение производительности. Машина содержит поворотную в горизонтальной и вертикальной плоскостях стрелу 1 с закрепленными на ее противоположных концах сучкорезной 2 и приемной 3 головками. На стреле имеются направляющие, в которых установлена каретка 14. Машина имеет .гидроцилиндры поворота стрелы в вертикальной и горизонтальной плоскостях ножей сучкорезной 2 и приемной 3 головок, гидромотор механизма перемещения каретки, а также электроуправляемые гидрораспределители этих гидроцилиндррв. . Система управления содержит каналы управления гидрораспределителями. На входы каналов управления подключены датчик наличия дерева в сучкорезной головке, датчики давления в гид- роцилиндрях ножей сучкорезной и приемной головок, датчики исходного положения ножей сучкорезной и приемной головок, датчик 5 рабочего положения стрелы в вертикальной плоскости, датчик 7 рабочего положения стрелы в горизонтальной плоскости, датчик 8 наличия дерева в приемной головке и датчики 12 и 13 крайних положений каретки. Оператор осуществляет захват компя, лежащего в штабеле дерева, сучкорезной головкой 2. Далее система управления обеспечивает полностью автоматический цикл обработки данного дерева. 6 з.п. ф-лы, 4 ил. с S ГчЭ СО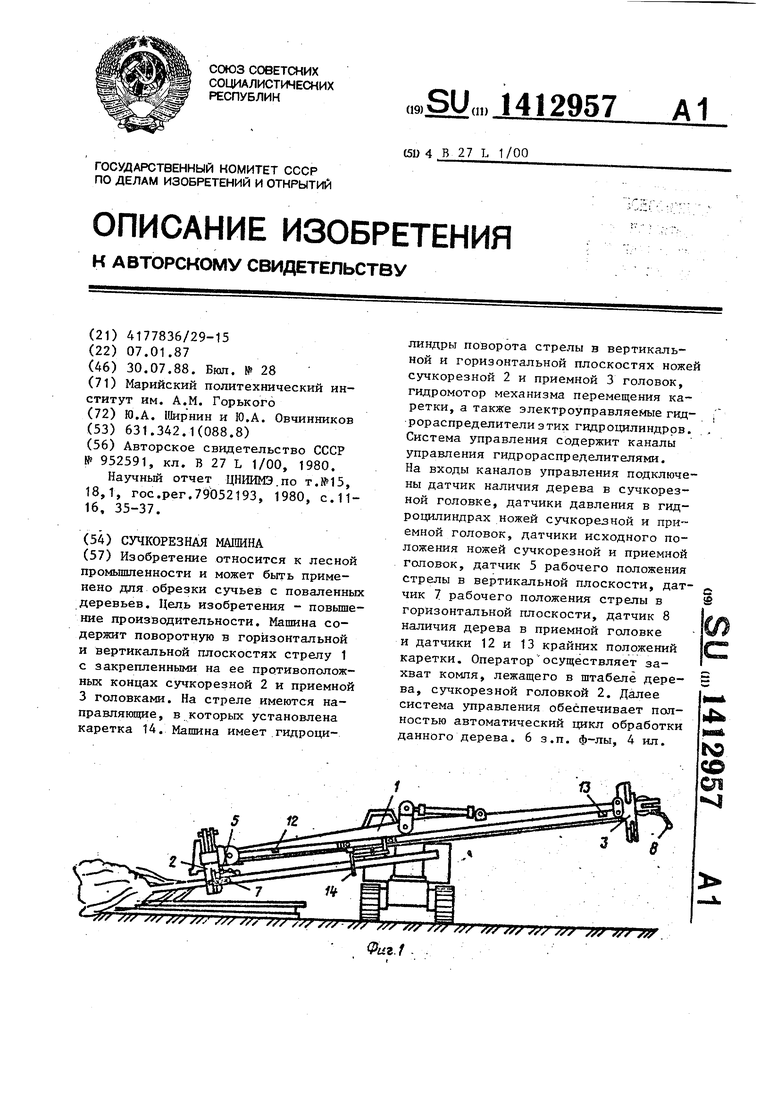
ные с датчиками каналы 15-21 управления располагаются на пульте 22 управления, их выходы соединены с гидрораспределителями 23-30,
Схемы управления содержат девять элементов И 31-39, пять элементов ИЛИ 40-44 и.десять элементов НЕ 43-54.
Канал 15 управляется гидрораспределителем 23 закрытия ножей сучкорезной ЗО (предельного раскрытого) положения.
головки, каналы 16 и 17 - гидрорас- гфеделителями 24 и 25 поворота стрелы соответственно в вертикальной и горизонтальной плоскостях. Канал управления движением каретки 14 состоит из двух схем - 18 и 19, которые управляют гидрораспределителями 26 и 27 соответственно холостого и рабочего ходов каретки. Канал 20 управляет гидрораспределителем 28 закрытия ножей приемной головки, канал 21 - гидрораспределителями 29 и 30 раскрытия ножей приемной и сучкорезной головок.
35
При достижении заданного давления в гидроцилиндре сучкорезной головки 2 срабатывает датчик 6, сигнал которого открывает элемент И 32 и через него включает гидрораспределитель 24 поворота стрелы в вертикальной плоскости, а через элемент НЕ 45 отключает элемент И 31, прекращая дальней- щий зажим комля дерева.
Q После того, как угол между осями дерева и стрелы 1 в вертикальной плоскости достигнет заданного значения, срабатывает датчик 5, сигнал которого через элемент НЕ 46 отключает
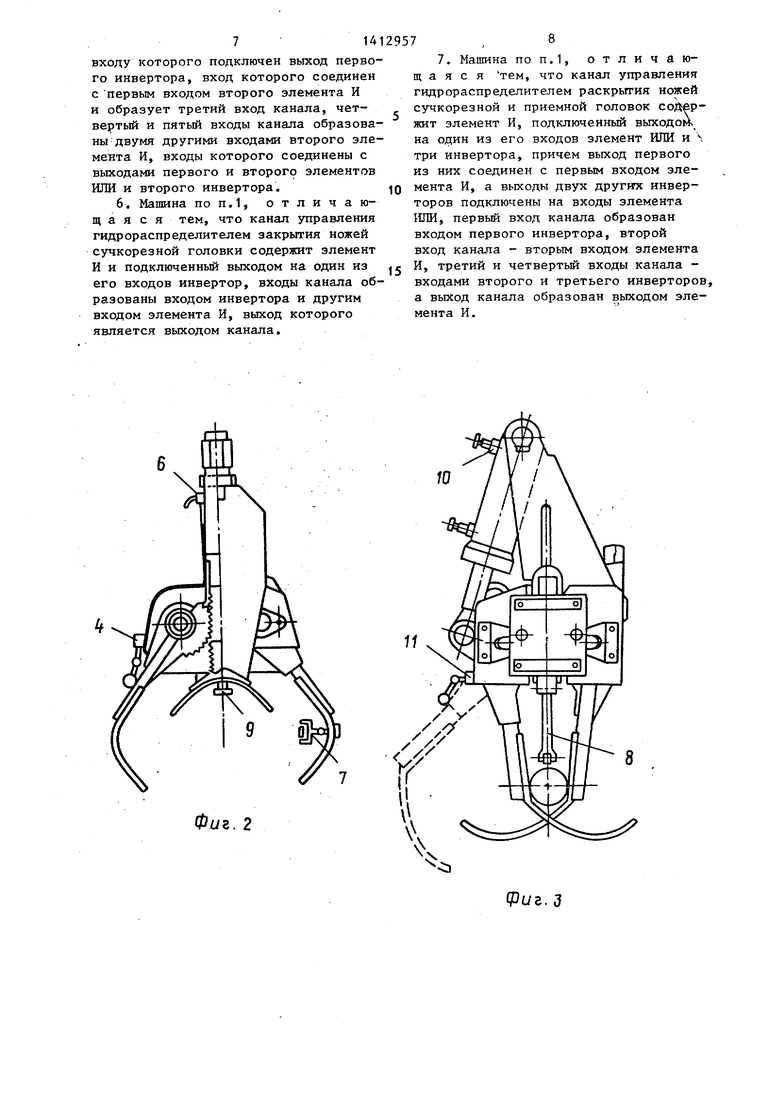
На сучкорезной головке 2 установле-., элемент И 32, прекращая поворот стре- лы в вертикальной плоскости, открыны датчик 4 исходного положения ножей, датчики 5 и 7 рабочего положения стрелы соответственно в вертикальной и горизонтальной плоскостях, датчик 6 предельного давления в гидроцилиндре ножей, датчик 9 наличия дерева.
На приемной головке 3 установлены датчик 8 наличия дерева,датчик 10 предельного давления в гидроцилиндре ножей, датчик 11 исходного положения раскрытых ножей.
На стреле 1 установлены датчики 1срайнего заднего 12 и крайнего переднего 13 положений каретки.
50
55
вает элемент И 33, включая гидрораспределитель 25 поворота стрелы в горизонтальной плоскости и обеспечивая центровку дерева относительно сучко-г резной 2 и приемной 3 головок и подготавливает к включению элемент И 34. После окончания.центровки срабатывает датчик ,7, его сигнал последовательно открывает элементы И 34 и ИЛИ 42, а через элемент НЕ 47 отключает элемент И 33, прекращая поворот стрелы в горизонтальной плоскости. Одновременно с выхода элемента ИЛИ 42
через него включает гидрораспределитель 23 закрытия ножей сучкорезной : головки 2, Одновременно сигнал с вы- хода элемента И 31 поступает на вход элемента обратной связи ИЛИ 40, запоминая сигнал датчика 4, которьй прекращает его подачу при отходе ножей сучкорезной головки 2 от исходного
5
При достижении заданного давления в гидроцилиндре сучкорезной головки 2 срабатывает датчик 6, сигнал которого открывает элемент И 32 и через него включает гидрораспределитель 24 поворота стрелы в вертикальной плоскости, а через элемент НЕ 45 отключает элемент И 31, прекращая дальней- щий зажим комля дерева.
0
5
вает элемент И 33, включая гидрораспределитель 25 поворота стрелы в горизонтальной плоскости и обеспечивая центровку дерева относительно сучко-г резной 2 и приемной 3 головок и подготавливает к включению элемент И 34. После окончания.центровки срабатывает датчик ,7, его сигнал последовательно открывает элементы И 34 и ИЛИ 42, а через элемент НЕ 47 отключает элемент И 33, прекращая поворот стрелы в горизонтальной плоскости. Одновременно с выхода элемента ИЛИ 42
3ТА
поступает сигнал на вход элемента И 36, который открывается, если с датчика 13 через элемент ИЛИ 41 поступает сигнал о нахождении каретки 14 в правом переднем положении. С выхода открытого элемента И 36 поступает сигнал на включение гидрораспределителя 26 холостого хода каретки и .одновременно на вход элемента обратной связи ИГО 41, запоминая сигнал датчика 13, которьй прекращает его подачу при отходе каретки 14 из крайнего переднего положения.
В момент прихода каретки 14 в край нее заднее положение срабатывает датчик 12, сигнал которого через элемент НЕ 49 последовательно отключает элементы И 36 и ИЛИ 41 (память), прекращая хол.остой ход каретки, а через элемент ИЛИ 43 открывает элемент И 37 и через него включает гидрораспределитель 27 рабочего хода каретки 14. Одновременно сигнал с выхода эле- мерта И 37 поступает на вход элемента обратной связи ИЛИ 43, запоминая сигнал датчика 12, который прекращает его подачу при отходе каретки 14 из крайнего задне го положения.
При рабочем перемещении каретки вперед, когда комель дерева попадает в приемную головку, срабатывает датчик 8, сигнал которого открывает элемент И 38 и через него включает гидрораспределитель 28 закрытия ножей при- |емной головки. Одновременно сигнал датчика 8 через элемент НЕ 48 закрыва jer элемент И 34, прекращая действие Датчика 7 на включение холостого хода каретки 14 и подготавливает элемент И 35 к включению его от датчика 10.
При достижении кареткой 14 крайнего, переднего положения срабатывает датчик 13, которьй через элемент НЕ 50 последовательно отключает элемент И 37 и ИЛИ 43 (память), прекращая рабочий ход каретки 14, а через элемент ШШ 41 готовит к включению элемент И 36.
При достижении через некоторое время заданного давления в гидроцилиндре приемной головки 3 срабатывает датчик 10, сигнал которого через элемент НЕ 51 отключает элемент И 38, прекращая закрытие ножей приемной головки 3, и одновременно включает элемент И 35, если на него поданы сигналы датчиков 8 и 9 фиксации ствола дерева в приемной 3 и сучкорезной
Q
з 0 5
д
0
5
Г/
2 головках. Сигнал с элемента И 35 через элемент ИШ1 42 открывает элемент И 36, который снова включает гидро- распределитель 26 холостого хода каретки 14. ачинается новый цикл перемещения каретки, управляемьш только датчиками 12 и 13.
Во время очередного рабочего хода каретки 14 в момент выхода ствола из сучкорезной головки 2 срабатывает датчик 9, который последовательно закрывает элементы И 35, ИЛИ 42 и И 36, исключая последующий холостой ход каретки от сигнала датчика 13, закрывает элемент И 32 и через элемент И 52 готовит к включению элемент И 39.
При достижении кареткой 14 крайнего переднего положения срабатывает датчик 13, которьй через элемент И 39 включает гидрораспределители 29 и 30 раскрытия ножей сут ткорезной 2 и приемной 3 головок при условии отсутствия сигналов датчиков 9,4 и 11 и через Зотемент НЕ 50 отключает элемент И 37. прекращая рабочий ход каретки. При достижении ножам сучкорезной 2 и приемной 3 головот крайних раскрытых положений срабатывают датчики 4 и 11, сигналы которых через элементы НЕ 53; 54 и ИПИ 44 отключают элемент И 39, прекращая раскрытие ножей сучкорезной 2 и приемной 3 головок, Однозре- менно датчики 9513,4 и 11 подготавливают начальное положение элемента И 31. Машина готова к обработке очередного дерева.
Таким образом, предлагаемая машина обеспечивает обрезку сучьев в автоматическом режиме, что приводит к повышению производительности и снижению утомляемости оператора.
Формула изобретения,
ния в гидроцилиндре ножей приемной
также систег€у управления, имеющую датчики переднего и заднего положений каретки и каналы управления, выходы которых подключены к входам управления соответствующих гидрораспределителей., отличающаяся
; тем, что5 с .целью повышения пройзво: дительности, система управления снаб жена датчиками наличия дерева в суч- Q и четвертьй входы - с датчиками ис: кореэной и приемной головках, давле- ходного положения ножей соответствен; ния в гидроцилиндре ножей сучкорез; ной и приемной головок, исходного
; положения ножей сучкорезной и приемной головок и рабочего положения
; стрелы в горизонтальной и вертикаль: иди плоскостях, канал управления гид: рораспределителем закрытия ножей име; ет пять входов, которые соединены
; соответственно с датчиками исходного 20 мента ИЛИ, второй, третий и четвертьй
положения Ножей сучкорезной головкивходы канала образованы входами эле: ИСХОДНОГО положения ножей приемной
, головки, переднего положения каретки,
наличия дерейа в сучкорезной головке
и с выходом канала управления гидрораспределителем поворота стрелы в вертикальной плоскости, к трем входам которого подключены датчики соответственно давления в гидроцилиндре
головки, канал управления гидрораспределителями раскрытия ножей сучкорезной и приемной головок имеет четыре входа, первый из которых соединен с датчиком наличия дерева в сучкорезной головке, второй - с датчиком переднего положения каретки, а третий
но сучкорезной и приемной головок.
ножей сучкорезной головки, наличия зо Дополнительный вход и выполнен в виде дерева Б сучкорезной головке и рабоче- элемента И и инвертора, основные входы го положения стрелы -.в вертикальной плоскости, к первому входу канала управления гидрораспределителем поворота стрелы в горизонтальной плоскости под канала образованы одним из входов, элемента И и входом инвертора, выход которого подключен к второму входу элемента И, дополнительньш вход канала
ключен датчик рабочего положения стре- образован третьим входом элемента И,
лы в вертикальной плоскости, а к вто-выход которого является выходом канарому - датчик рабочего положения стре-ла, лы в горизонтальной плоскости, первьй
Д, Машина ПОП.1, отличающаяся тем, что канал управления гидрораспределителем поворота стрелы в горизонтальной плоскости содержит элемент И и подключенньй выходом на один из его входов инверт.ор, входы канала образованы входами элемента И и инвертора, а выход канала образован выходом элемента И.
45
анал управления гидрораспределителями.. каретки имеет семь входов, первый вход канала соединен с датчиком переднего положе1шя каретки, второй вход соединен с датчиком рабочего положения стрелы в вертикальной плоскости, тре тий - с датчиком положения стрелы в горизонтальной плоскости, четвертьй вход - с датчиком наличия ствола в приемной головке, пятьй вход - с датчиком наличия дерева в сучкорезной головке, шестой вход - с датчиком давления в гидроцилиндре ножей приемной головки, седьмой вход - с датчиком заднего положения каретки, к первому входу канала управления гидрораспределителем закрытия ножей сучкорезной головки подключен датчик наличия дерева в приемной головке, а к второму - входу канала подключен датчик давления в гидроцилиндре ножей приемной
головки, канал управления гидрораспределителями раскрытия ножей сучкорезной и приемной головок имеет четыре входа, первый из которых соединен с датчиком наличия дерева в сучкорезной головке, второй - с датчиком переднего положения каретки, а третий
но сучкорезной и приемной головок.
Дополнительный вход и выполнен в виде элемента И и инвертора, основные входы
канала образованы одним из входов, элемента И и входом инвертора, выход которого подключен к второму входу элемента И, дополнительньш вход канала
образован третьим входом элемента И,
ла,
5
.
Д, Машина ПОП.1, отличающаяся тем, что канал управления гидрораспределителем поворота стрелы в горизонтальной плоскости содержит элемент И и подключенньй выходом на один из его входов инверт.ор, входы канала образованы входами элемента И и инвертора, а выход канала образован выходом элемента И.
5, Машина поп.1, отличающаяся тем, что канал управления гидрораспределителем каретки содержит дополнительньй вход и имеет четыре элемента И, три инвертора и три элемента ИЛИ, первьй вход канала образован первым входом третьего инвертора и первым входом первого элемента ИЛИ, второй вход которого соединен с первым выходом канала, дополнительньй и второй входы канала образованы входами первого элемента И, к третьему
входу которого подключен выход первого инвертора, вход которого соединен с первым входом второго элемента И и образует третий вход канала, четвертый и пятый входы канала образованы -двумя другими входами второго элемента И, входы которого соединены с выходами первого и второго элементов ИЛИ и второго инвертора.
Фиг. 2
5 И, третий и четвертьй входы канала - входами второго и третьего инверторов, а выход канала образован выходом элемента И.
Ю
11
Фиг.З
Г
г:
ч1
ФилМ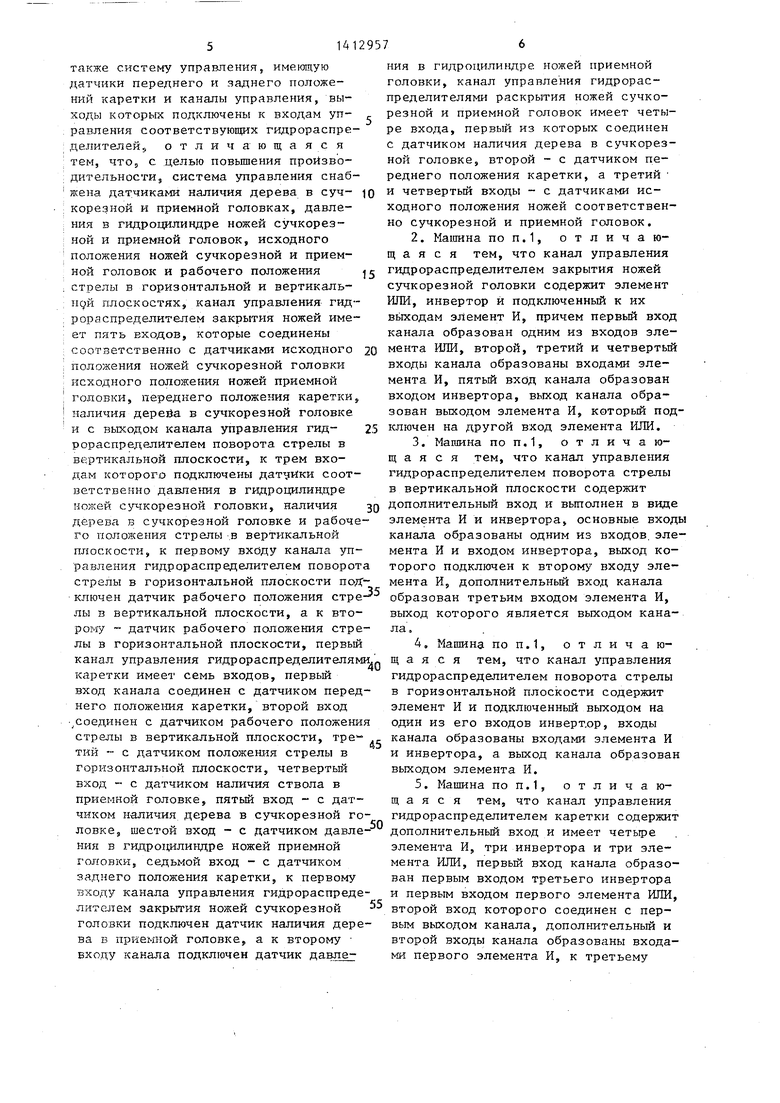
| Устройство для обрезки сучьев с поваленных деревьев | 1981 |
|
SU952591A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
