/// //////////////////////////////////////////Iт/// //#/#/////////S
Фиг1 1Б 17
Изобретение относится к оборудованию для лесной и деревообрабатывающей промышленности.
Цель изобретения - обеспечение автоматизации операций загрузки и раскряжевки и повышение производительности за счет сокращения времени на выполнение операций технологического процесса.
На фиг.1 показана сучкорезно-раскряжевочная машина; на фиг.2 - вид А на фиг.1; на фиг.З - схема автоматизированного управления гидрораспределителями рабочих механизмов машины.
Сучкорезно-раскряжевочня машина содержит установленные на поворотной платформе 1 протаскивающий механизм 2, направляющую опору 3 с выдвижной балкой 4, имеющей захватно-срезающую головку (ЗСГ) 5, ролик отмерз длин сортиментов 6, пильный механизм 7 и приемный лоток 8 с тремя сбрасывателями 9. Платформа смонтирована на шасси 10.
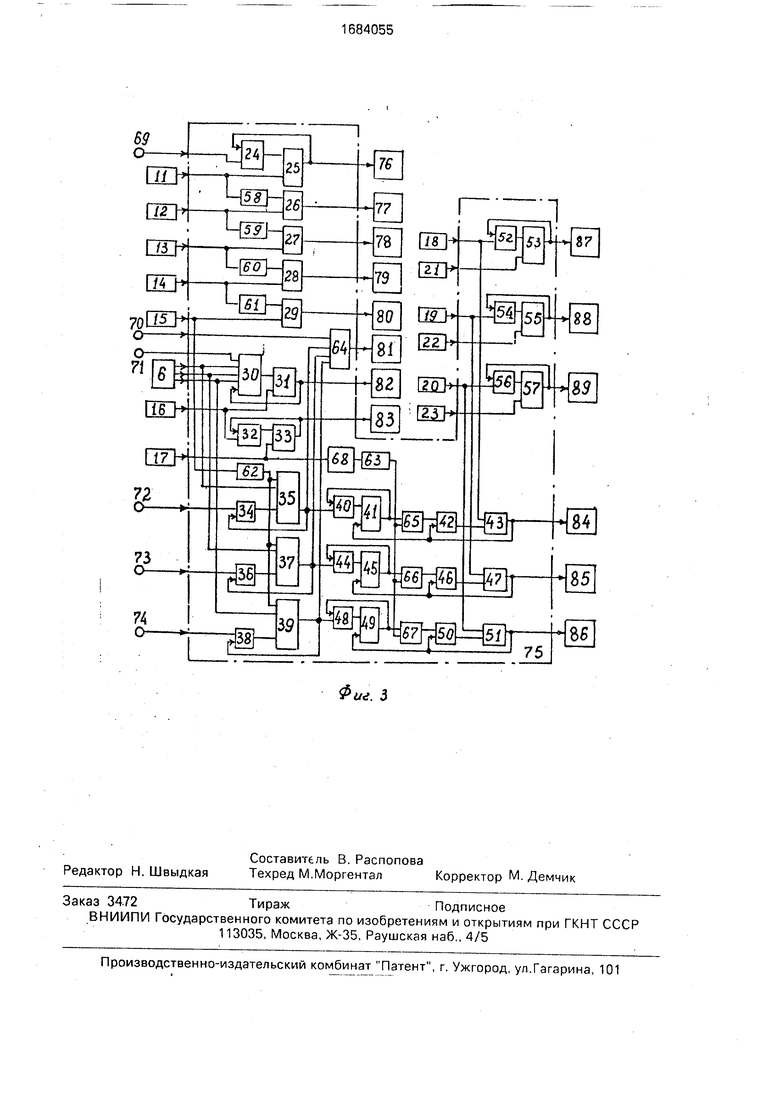
Машина снабжена датчиками заданного давления в гидромагистрали управления ножами захватно-срезающей головки 11, заданного положения дерева относительно балки в вертикальной плоскости 12, заданного положения дерева относительно балки в горизонтальной плоскости 13, фиксации ствола в протаскивающем механизме 14, заданного давления в гидромагистрали управления опусканием верхней гусеницы с балкой 15, заданного 16 и исходного 17 положений пилы, заданных 18, 19, 20 и исход- ных 21, 22, 23 положений трех сбрасывателей. Тридцать четыре логических элемента ИЛИ-НЕ 24-57, шесть логических элементов НЕ 58-63, логический элемент ИЛИ 64, три логических элемента И 65, 66 и 67, реле времени 68 и шесть входных шин 69-74 составляют устройство управления 75.
Гидросистема машины оборудована гидрораспределителями, которые управляют следующими приводами: закрытия ножей захватно-срезающей головки 76, подъема верхней гусеницы с балкой 77, поворота платформы 78, втягивания балки 79, опускания верхней гусеницы с балкой 80, протаскивающего механизма 81, подачи пилы 82, возврата пилы 83, сброса сортиментов соответственно первой 84, второй 85, третьей 86 длин, возврата сбрасывателей соответственно первой 87, второй 88 и третьей 89 длин.
Сучкорезно-раскряжевочная машина работает следующим образом.
Ручным управлением поднимаются направляющая опора 3 и верхняя гусеница протаскивающего механизма 2, выставляется выдвижная балка 4 в сторону штабеля деревьев, захватно-срезающая головка 5 наводится на комлевую часть дерева, охватывая его, но не зажимая. В данном положении машина подготовлена к работе в автоматическом режиме. Кратковременные сигналы подаются на шины 69-74 и сигнал заданной длительности - на шину 70 устройства управления 75, например, с помощью
0 кнопок с пульта управления оператором.
Подается импульс на первую шину Пуск 69, который через элементы ИЛИ-НЕ 24 и 25 включает гидрораспределитель 76 привода закрытия ножей захватно-срезаю5 щей головки 5 одновременно сигнал с выхода элемента ИЛИ-НЕ 25 поступает на вход элемента ИЛИ-НЕ 24, который запоминает импульс, поданный на шину 69.
При достижении заданной величины
0 давления в гидромагистрали управления ножами ЗСГ 5 срабатывает датчик 11, сигнал которого закрывает элемент ИЛИ-НЕ 25, прекращая закрытие ножей ЗСГ и отключая элемент памяти ИЛИ-НЕ 24, а через эле5 мент НЕ 58 и элемент ИЛИ-НЕ 26 включает гидрораспределитель 77 подъема верхней гусеницы с балкой 4.
После того, как дерево достигнет заданного положения относительно балки в пло0 скости срабатывает датчик 12, сигнал которого закрывает элемент ИЛИ-НЕ 26, прекращая подъем верхней гусеницы с балкой, а через элементы НЕ 59 и элемент ИЛИ- НЕ 27 включает гидрораспределитель 78
5 поворота платформы 1 с целью центровки дерева в протаскивающем механизме 2.
После того, как дерево достигнет заданного положения относительно балки в горизонтальной плоскости, т.е. после окончания
0 центровки, срабатывает датчик 13, сигнал которого закрывает элемент ИЛИ-НЕ 27, прекращая поворот платформы, а через элемент НЕ 60 и элемент ИЛИ-НЕ 28 включает гидрораспределитель 79 втягивания балки.
5 Как только комель дерева войдет в протаскивающий механизм 2 на заданную глубину, срабатывает датчик 14, сигнал которого закрывает элемент ИЛИ-НЕ 28, прекращая втягивание балки, а через эле0 мент НЕ 61 и элемент ИЛИ-НЕ 29 включает гидрораспределитель 80 опускания верхней гусеницы с балкой.
При достижении заданной величины давления в гидромагистрали управления
5 опусканием верхней гусеницы срабатывает датчик 15, сигнал которого закрывает элемент ИЛИ-НЕ 29, прекращая опускание верхней гусеницы, а через элемент НЕ 62 подготавливает к включению элементы ИЛИ-НЕ 35, 37 и 39.
Для подачи дерева под откомлевку подается сигнал на вторую шину 70, который через элемент ИЛИ 64 включает гидрораспределитель 81 протаскивающего механизма. После визуальной оценки длины протаскивания дерева под откомлевку снимается сигнал с шины 70, при этом закрывается элемент ИЛИ 64, отключая протаскивающий механизм.
После прекращения протаскивания дерева подается импульс на третью шину 71, который через элементы ИЛИ-НЕ 30 и 31 включает гидрораспределитель 82 подачи пилы пильного механизма 7, одновременно сигнал с выхода элемента ИЛИ-НЕ 31 поступает на вход элемента ИЛИ-НЕ 30, который запоминает импульс, поданный на шину 71. При отходе пилы от исходного положения датчик 17 подготавливает к включению элемент ИЛИ-НЕ 33 от сигнала датчика 16 и отключает реле времени 68, которое через элемент НЕ 63 подготавливает к включению элементы И 65, 66 и 67.
После завершения пропила срабатывает датчик 16, сигнал которого закрывает элемент ИЛИ-НЕ 31, прекращая подачу пилы и отключая элемент памяти ИЛИ-НЕ 30, а через элементы ИЛИ-НЕ 32 и 33 включает гидрораспределитель 83 возврата пилы, одновременно сигнал с выхода элемента ИЛИ-НЕ 33 поступает на вход элемента ИЛИ-НЕ 32, который запоминает сигнал датчика 16.
При возврате пилы в исходное положение срабатывает датчик 17,сигнал которого закрывает элемент ИЛИ-НЕ 33, прекращая возврат пилы и отключая элемент памяти ИЛИ-НЕ 32, а также включает реле времени 68, которое через элемент НЕ 63 закрывает элемент И 65, 66 и 67.
Команды для протаскивания дерева на одну из трех длин сортиментов подаются в виде импульсов (например, с пульта управления или программного устройства) на одну из трех шин: четвертую 72, пятую 73 или шестую 74.
Импульс, поступивший на шину 72(либо шину 73, либо шину 74) через элемент ИЛИ- НЕ 34 (соответственно элементы ИЛИ-НЕ 36 и 38), элемент ИЛИ-НЕ 35 (соответственно элементы ИЛИ-НЕ 37 и 39), элемент ИЛИ 64 включает гидрораспределитель 81 привода протаскивающего механизма на одну из трех длин. Одновременно сигнал с выхода элемента ИЛИ-НЕ 35 (соответственно элементов ИЛИ-НЕ 37 и 39) включает элемент памяти ИЛИ-НЕ 34 (соответственно элементы ИЛИ-НЕ 36 и 38), запоминающий импульс, поданный на шину 72 (либо шину 73, либо шину 74), а через элемент ИЛИ-НЕ
40 (соответственно элементы ИЛИ-НЬ 44 и 48), включает элемент ИЛИ-НЕ 41 (соответственно элементы ИЛИ-НЕ 45 и 49), сигнал с выхода которого подготавливает к включе- 5 нию элемента И 65 (соответственно элементы И 66 и 67) и включает элемент памяти ИЛИ-НЕ 40 (соответственно элементы И ЛИНЕ 44 и 48).
После окончания протаскивания дерева
0 подается импульс с первого (либо второго, либо третьего) выхода ролика отмерз длин б, который через элемент ИЛИ-НЕ 35 (соответственно элементы ИЛИ-НЕ 37 и элемент ИЛИ-НЕ 39) и элемент ИЛИ 64 прекращает
5 протаскивание дерева и отключает элемент памяти ИЛИ-НЕ 34 (соответственно элементы ИЛИ-НЕ 36 и 38), а через элементы ИЛИ- НЕ 30 и 31 включает гидрораспределитель подачи пилы 82. Начинается цикл подачи и
0 возврата пилы, описанный выше.
После возврата пилы в исходное положение сигнал датчика 7 включает реле времени 68, сигнал с выхода которого через элемент НЕ 63 открывает элемент И 65 (либо
5 элемент И 66, либо элемент И 67), а через элементы ИЛИ-НЕ 42 (соответственно элементы ИЛИ-НЕ 46 и 50), 43 (соответственно элементы ИЛИ-НЕ 47 и 51) включает гидрораспределитель 84 (соответственно гидро0 распределители 85, 86) сброса сортимента с лотка 8. Одновременно сигнал с выхода элемента ИЛИ-НЕ 43 (соответственно с выхода элементов ИЛИ-НЕ 47 и 51) отключает элементы ИЛИ-НЕ 41 (соответственно элемен5 ты ИЛИ-НЕ 45 и 49), 40 (соответственно элементы ИЛИ-НЕ 44 и 48), элементы И 65 (соответственно элементы И 66 и 67), а через элемент ИЛИ-НЕ 42 (соответственно элементы ИЛИ-НЕ 46 и 50) запоминает сигнал
0 датчика 17.
При достижении сбрасывателем заданного положения срабатывает датчик 18 (либо датчик 19, либо датчик 20, сигнал которого закрывает элемент ИЛИ-НЕ 43 (со5 ответственно элементы ИЛИ-НЕ 47 и 51) и элемент памяти ИЛИ-НЕ 42 (соответственно элементы ИЛИ-НЕ 46 и 50), прекращая рабочий ход сбрасывателя, а через элементы ИЛИ-НЕ 52 (соответственно элементы
0 ИЛИ-НЕ 54 и 56), 53 (соответственно элементы ИЛИ-НЕ 55 и 57) включает гидрораспределитель 87 (соответственно гидрораспределители 88 и 89) возврата сбрасывателя, одновременно сигнал с выхо5 да элемента ИЛИ-НЕ 53 (соответственно элементов ИЛИ-НЕ 55 и 57) поступает на вход элемента ИЛИ-НЕ 52 (соответственно элементов ИЛИ-НЕ 54 и 56), запоминая сигнал датчика 18 (соответственно датчиков 19 и 20).
При достижении сбрасывателем исходного положения срабатывает датчик 21 (либо датчик 22, либо датчик 23), сигнал которого закрывает элемент ИЛИ-НЕ 53 (соответственно элементы ИЛИ-НЕ 55 и 57), прекращая возврат сбрасывателя.
Машина готова к обработке следующего дерева. Таким образом, снабжение сучкорезно-раскряжевочной машины датчиками заданного давления в гидромагистрзли управления ножами захватно-срезающей головки, заданного положения дерева относительно балки в вертикальной и горизонтальной плоскостях, фиксации ствола в протаскивающем механизме, заданного давления в гидромагистрали управления опусканием верхней гусеницы с балкой, заданного и исходного положения пилы, заданных и исходных положений трех сбрасывателей и устройством управления гидрораспределителями позволяет автоматизировать процессы управления технологическим оборудованием, что снижает технологическую загрузку оператора и повышает производительность машины.
Формула изобретения Сучкорезно-раскряжевочная машина, включающая самоходное шасси со смонтированной на нем поворотной платформой, на которой установлена рама с нижним протаскивающем механизмом и шарнирно - рама с верхним протаскивающим механизмом, направляющую опору с выдвижной балкой с захватно-срезающей головкой с возможностью их вертикального перемещения относительно нижнего протаскивающего механизма, ролик отмера длин сортиментов, пильный механизм, приемный лоток со сбрасывателями бревен и схему управления гидрораспределителями приводов рабочих механизмов, отличаю щ а я с я тем, что, с целью обеспечения автоматизации операций загрузки и раскряжевки и повышения производительности за счет сокращения времени на выполнение операций технологического процесса, схема управления снабжена датчиками заданного давления в гидромагистралях управления ножами захватно-срезающей головки и опусканием верхней гусеницы с балкой, заданных положений дерева относительно балки в вертикальной и горизонтальной плоскостях, пилы и трех сбрасывателей бревен, фиксации ствола в протаскивающем механизме, исходных положений пилы и трех сбрасывателей бревен, причем выходы датчиков подключены к входам схемы управления, содержащей тридцать четыре логических элемента ИЛИНЕ, шесть логических элементов НЕ, логический элемент ИЛИ, три логических элемента И, реле времени и шесть входных шин, выходы устройства управления соединены С гидрораспределителями, управляющими приводами закрытия ножей захватно-срезающей головки, подъема гусеницы с балкой, поворота платформы, втягивания балки, опускания верхней гусеницы с
0 балкой, протаскивающего механизма, подачи и возврата пилы, сброса сортиментов первой, второй и третьей длин, возврата сбрасывателей первой, второй и третьей длин, причем первая шина Пуск соедине5 на с вторым входом первого элемента ИЛИ- НЕ, выход которого соединен с первым входом второго элемента ИЛИ-НЕ, выход которого соединен с гидрораспределителем привода закрытия ножей захватно срезаю0 щей головки и с первым входом первого элемента ИЛИ-НЕ, а второй его вход - с выходом датчика заданного давления в гидромагистрали управления ножами захват- но-срезающей головки и через первый
5 элемент НЕ с первым входом третьего элемента ИЛИ-НЕ, выход которого соединен с гидрораспределителем привода подъема верхней гусеницы с балкой, а второй его вход - с выходом датчика заданного поло0 жения дерева относительно балки в вертикальной плоскости и через второй элемент НЕ - с первым входом четвертого элемента ИЛИ-НЕ, выход которого соединен с гидрораспределителем привода поворота плат5 формы, а второй его вход - с выходом датчика заданного положения дерева относительно балки в горизонтальной плоскости и через третий элемент НЕ - с первым входом пятого элемента ИЛИ-НЕ, выход кото0 рого соединен с гидрораспределителем привода втягивания балки, а второй его вход - с выходом датчика фиксации ствола в протаскивающем механизме и через четвертый элемент НЕ - с первым входом шестого эле5 мента ИЛИ-НЕ, выход которого соединен с гидрораспределителем опускания верхней гусеницы с балкой, а второй его вход - с выходом датчика заданного давления гидромагистрали управления опусканием верх0 ней гусеницы с балкой и через пятый элемент НЕ - с первыми входами двенадцатого, четырнадцатого и шестнадцатого элементов ИЛИ-НЕ, вторые входы которых соединены соответственно с первым, вто5 рым и третьим выходами ролика отмера длин сортимента и вторым, третьим и четвертым входами седьмого элемента ИЛИ- НЕ, первый вход которого соединен с третьей шиной устройства управления, а выход его - с первым входом восьмого элемента ИЛИ-НЕ, выход которого соединен с пятым входом седьмого элемента ИЛИ-НЕ и с гидрораспределителем привода подачи пилы, а второй его выход - с выходом датчика заданного положения пилы и с вторым вхо- дом девятого элемента ИЛИ-НЕ, выход ко- торого соединен с первым входом десятого элемента ИЛИ-НЕ, выход которого соединен с первым входом девятого элемента ИЛИ-НЕ с гидрораспределителем привода возврата пилы, а второй его вход - с выхо- . дом датчика исходного положения пилы и с входом реле времени, выход которого через шестой элемент НЕ соединен с вторыми входами первого, второго и третьего эле- ментов И, вторая шина устройства управления соединена с первым входом первого элемента ИЛИ, выход которого соединен с гидрораспределителем привода протаскивающего механизма, а второй, третий и чет- вертый его входы - с вторыми входами соответственно семнадцатого, двадцать первого и двадцать пятого элементов ИЛИ- НЕ и с выходами соответственно двенадцатого, четырнадцатого и шестнадцатого элементов ИЛИ-НЕ, вторые выходы которых соединены соответственно с выходами одиннадцатого, тринадцатого и пятнадцатого элементов ИЛИ-НЕ, первые входы которых соединены соответственно с четвертой, пятой и шестой шинами устройства управления, а вторые его входы - соот- ветственно с выходами двенадцатого, четырнадцатого и шестнадцатого элементов ИЛИ-НЕ, выходы семнадцатого, двад- цать первого и двадцать пятого элементов ИЛИ-НЕ соединены соответственно с первыми входами восемнадцатого, двадцать второго и двадцать шестого элементов ИЛИ-НЕ, выходы которых соединены соот-
ветственнос первыми входами семнадцатого, двадцать первого и двадцать пятого элементов ИЛИ-НЕ и с первыми входами соответственно первого, второго и третьего элементов И, выходы которых соединены с первыми входами соответственно девятнадцатого, двадцать третьего и двадцать седьмого элементов ИЛИ-НЕ, выходы которых соединены с вторыми входами соответственно двадцатого, двадцать четвертого и двадцать восьмого элементов ИЛИ-НЕ, выходы которых соединены соответственно с вторыми входами восемнадцатого, двадцать второго и двадцать шестого элементов ИЛИ-НЕ, с вторыми входами девятнадцатого, двадцать третьего и двадцать седьмого элементов ИЛИ-НЕ, с гидрораспределителями приводов сброса сортиментов первой, второй и третьей длин, первые входы двадцатого, двадцать четвертого и двадцать восьмого элементов ИЛИ-НЕ соединены с выходами датчиков заданных положений сбрасывателей бревен соответственно первой, второй и третьей длин и с вторыми входами соответственно двадцать девятого, тридцать первого и тридцать третьего элементов ИЛИ-НЕ, выходы которых соединены с первыми входами соответственно тридцатого, тридцать второго и тридцать четвертого элементов ИЛИ-НЕ, вторые выходы которых соединены с выходами датчиков исходных положений сбрасывателей бревен соответственно первой, второй и третьей длин, а выходы - с гидрораспределителями приводов сбрасывателей соответственно первой, второй и третьей длин и с первыми входами соответственно двадцать девятого, тридцать первого и тридцать третьего элементов ИЛИ-НЕ.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| Устройство для обрезки сучьев | 1981 |
|
SU1030166A1 |
| Сучкорезная машина | 1987 |
|
SU1412957A1 |
| Сучкорезная машина | 1990 |
|
SU1787774A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1991 |
|
RU2027346C1 |
| Лесозаготовительная машина | 1989 |
|
SU1692840A1 |
| МЕХАНИЗИРОВАННАЯ СИСТЕМА ДЛЯ РАСКРОЯ ДРЕВЕСНЫХ СТВОЛОВ /ВАРИАНТЫ/ | 2008 |
|
RU2400353C2 |
| Устройство для отмера длин сортиментов | 1981 |
|
SU1013274A1 |
| Устройство для отмера длин сортиментов | 1985 |
|
SU1445964A1 |
| ПРОТАСКИВАЮЩЕЕ УСТРОЙСТВО ДЕРЕВООБРАБАТЫВАЮЩЕЙ МАШИНЫ | 1992 |
|
RU2080251C1 |

Изобретение относится к оборудованию для лесной и деревообрабатывающей промышленности. Цель - обеспечение автоматизации операций загрузки и раскряжевки и повышение производительности за счет сокращения времени на выполнение операций, технологического процесса. Технологи- ческое оборудование машины, установленное на самоходном шасси, включает в себя поворотную платформу 1, на которой установлены протаскивающий механизм 2, направляющая опора 3 с выдвижной балкой 4, оборудованной захватно-срезающей головкой 5, ролик отмерз длин 6, пильный механизм 7 и прием- ный лоток 8 со сбрасывателями 9. Управление технологическим оборудованием осуществляется автоматически. Все опе- рации (кроме наведения захватно- срезающей головки 5 на дерево) выполняются автоматически. Схема управления оборудованием сучкорезно-раскряжевочной машины выполнена на логических элементах. 3 ил. Чв/ Ё.
биЪ А
11
Щи г. Z
Фиг. 3
| Мазалов Е.П | |||
| и Адамов Л.Г | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
| Системы автоматизированного управления мобильными лесозаготовительными машинами, Труды ЦНИИ- МЭ, г.Химки, 1981,с,35-40. | |||
