00
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерная система автоматического управления и контроля глубины укладки дрен | 2020 |
|
RU2742807C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| СПОСОБ УКЛАДКИ ДРЕНИРУЮЩЕГО КОЛЛЕКТОРА В ВОДОНАСЫЩЕННЫХ ГРУНТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2320814C2 |
| Способ строительства дренажа в водонасыщенных грунтах | 1990 |
|
SU1772316A1 |
| СПОСОБ ПОДГОТОВКИ ДРЕНОУКЛАДЧИКА К ПРОДОЛЖЕНИЮ СТРОИТЕЛЬСТВА ДРЕНАЖА ЗИМОЙ | 1998 |
|
RU2142036C1 |
| Способ укладки закрытого дренажа и устройство для его осуществления | 1988 |
|
SU1714054A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Способ строительства дренажа в водонасыщенных грунтах | 1988 |
|
SU1569379A1 |
| Дреноукладчик | 1975 |
|
SU540016A1 |

Изобретение относится к землеройной технике, средствам автоматизации машин для укладки дренажа с заданным уклоном. Целью изобретения является повышение точности укладки дренажа. Для этого дренажная труба (ДТ) 18 проходит через датчик пути (ДП) 19 и далее через приемный лоток 1 попадает в трубоукладчик 2. Для монтажа ДТ 18 подвижный кронштейн 4 откидывается, поворачиваясь относительно неподвижного 3 вокруг пальцев 7 и 8. При перемещении через ДН 19, ДТ 18 выпрямляется между роликами 14 и 15 и мерное колесо (МК) 20 катится по выпрямленному участку трубы. При вращении МК 20 происходит перемещение крыльчатки 25 относительно чувствительного элемента 24, установленного внутри корпуса 23 ДП 19. При необходимости использования ДТ 18 другого диаметра ролики 14 и 15 выполнены съемными. 1 з.п. ф-лы, 1 ил.
Изобретение относится к землеройной, в частности к мелиоративной, технике средствам автоматизации машин для укладки дренажа с заданным уклоном.
Точное выдерживание уклона укладываемой дренажной линии, являющееся одним из важнейших требований к качеству строительства дренажной системы, существенно зависит от точности измерения пройденного дреноукладчиком пути, поскольку уклон определяется как отношение изменения глубины укладки (высотного положения рабочего органа) к этому пути.
Известны содержащие датчик пути лазерные системы для автоматического управления высотным положением рабочих органов дреноукладчиков фирмы Spectra- Physics (США). Лазерная система состоит из излучателя, установленного на специальном штативе, фотоприемника, установленного на рабочем органе дреноукладчика при помощи телескопической штанги с электроприводом, импульсного счетчика пройденного расстояния (датчика пути) и блока программного управления. Счетчик регистрирует путь, пройденный мерным колесом, катящимся по укладываемой пластмассовой трубе и периодически выдает в программное устройство импульсы, что ведет к подъему или опусканию телескопической штанги с фотоприемником. Изменение высотного положения фотоприемника относительно лазерного луча приводит к отработке гидроцилиндров на подъем и опускание рабочего органа. Установка требуемого уклона или изменение его производится оператором из кабины машины при помощи задатчика в блоке программного управления.
Известен отечественный дреноуклад- чик МД-12 для укладки в грунт пластмассе N|00
00
а
Јь
вых дренажных труб диаметром до 90 мм с заданным уклоном, для выдерживания которого служат серийные лазерные системы УКЛ-1, УКЛ-2, УКЛ-3 и система Диспетчер (УКЛ-4).
Система УКЛ-1,2 и 3 обеспечивают установку луча лазера с требуемым уклоном, что позволяет управлять траекторией рабочего органа дрёноу кладчйТо относительно этого луча. Однако, при этом один лазерный излу- чатель может быть использован только для одной машины. При этом датчик пути не нужен. Система Диспетчер формирует горизонтальную лазерную плоскость и при помощи ее возможно осуществить управле- ние положением в пространстве рабочих органов нескольких машин одновременно. При этом важном достоинстве системы она, однако, нуждается в измерении пути, пройденного машиной.
Система управления Диспетчер - прототип имеет блок программного управления, установленный в кабине дреноукладчика, подъемный механизм фотоприемника и датчик пути, установленный на специальном кронштейне на трубоукладчике машины.
Датчик пути представляет собой корпус, в котором установлен индуктивный чувствительный элемент. В прорези элемента перемещаются лопасти крыльчатки, вращение которой передается от мерного колеса, катящегося по укладываемой пластмассовой трубе. Датчик пути выдает в блок программного управления электрические сигналы о пройденном пути, что позволяет вводить корректуры в высотные положения фотоприемника и, тем самым, осуществлять укладку дренажных труб с требуемыми уклонами,
При работе машины пластмассовая труба сматывается с катушки и попадает в приемный лоток, который служит для ввода в трубоукладчик дренажной трубы и одновременно кронштейном для установки датчика пути. В приемном лотке имеются направляющие кольца, по которым перемещается дренажная труба.
Для устранения соскальзывания дренажной трубы с мерного колеса перед дат- чиком закрепляется направляющая скоба. Постоянный контакт с мерным колесом обеспечивается прижатием части пластмассовой трубы между катушкой и трубоукладчиком, величина которого зависит от массы петли и усилия натяжения в трубе.
В связи со специфическими условиями эксплуатации мелиоративной техники (грязь, влага, пыль и т.п.) величина усилия сматывания дренажной трубы с катушки
значительно изменяется. Поэтому при укладке изменяются натяжение и кривизна трубы, в т.ч. в месте соприкосновения ее с мерным колесом. Вследствие того, что дренажная труба гофрирована, при ее искривлении изменяются наружные линейные размеры, в частности при изгибе трубы наружная образующая со стороны выпуклости удлиняется, а с внутренней образующей со стороны вогнутости укорачивается. Это приводит к ошибкам при измерении длины дренажной трубы (пути) и, как следствие, ошибкам в выдерживании уклона при укладке трубы в грунте.
Особенно большие погрешности в измерении пройденного расстояния дренажной трубы при обкатывании ее мерным колесом имеет место при замене одного размера (диаметра) дренажной трубы на другой. Так, например, дреноукладч ик МД- 12 предназначен для укладки дренажных пластмассовых труб с наружным диаметром , 63, 75 и 90 мм и каждый переход с одного размера дренажной трубы на другой будет вызывать появление погрешности в измерении пути и, как следствие этого, погрешность в выдерживании уклона (этот факт нашел отражение в протоколе приемных испытаний опытного образца гидравлического механизма перемещения фотоприемника с программным устройством на дреноукладчике МД-12 от 28 октября 1988г.).
Целью изобретения является повышение точности укладки дренажа путем устранения отмеченных выше недостатков устройства для измерения пути, пройденного дреноукладчиком.
Эта цель достигнута тем, что датчик пути, включающий мерное колесо, установленное с возможностью взаимодействия с дренажной трубой, снабжен подвижным и неподвижным кронштейнами с роликами, установленными с возможностью взаимодействия с дренажной трубой, причем ролики неподвижного кронштейна установлены на одном уровне с мерным колесом под роликами подвижного кронштейна.
Кроме того, с целью расширения функциональных возможностей за счет использования труб с различным диаметром, ролики выполнены съемными с изменением межцентрового расстояния между ними.
Существенность заявляемых отличий определяется тем, что введение в прототип отличительных признаков придает датчику новое свойство: устранение погрешности измерения пройденного пути при укладке гибкой дренажной трубы в условиях изменения криволинейности ее и вне зависимости от диаметра ее.
Этим свойством прототип не обладал, что приводило к появлению больших погрешностей в выдерживании заданного уклона при укладке.
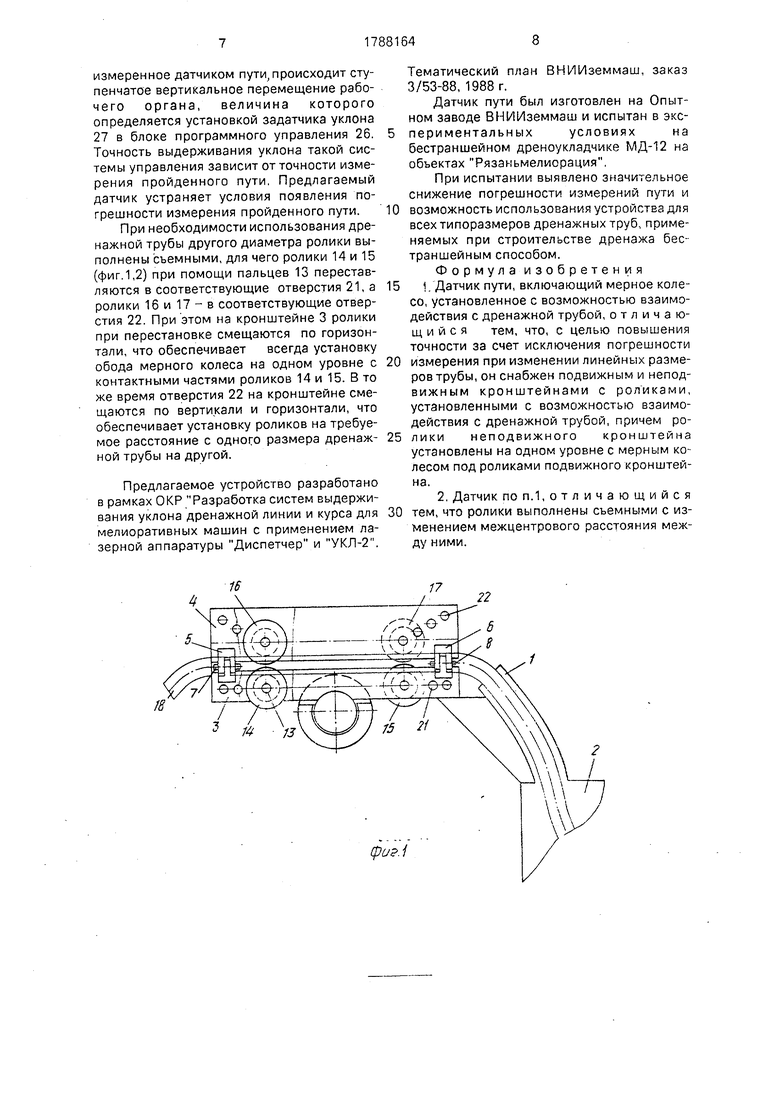
На фиг. 1 изображено устройство для измерения пути дреноукладочной машины, вид сбоку; на фиг.2 - устройство для измерения пути дреноукладочной машины, вид в плане.
На приемном лотке 1 трубоукладчика 2 (фиг. 1, 2) дреноукладочной машины установлено два кронштейна - неподвижный 3 и подвижный 4. Оба кронштейна соединены между собой шарнирно при помощи проушин 5, 6 и пальцев 7, 8 и зажимным устройством в виде поворотных болтов 9, 10 и гаек 11, 12 с барашками. На кронштейнах 3 и 4 при помощи пальцев 13 установлены ролики 14, 15, 16 и 17, с контактными частями которых при работе дреноукладчика взаимодействует дренажная труба 18.
На неподвижном кронштейне 3 крепится датчик 19 с мерным колесом 20, наружный обод которого расположен нз одном уровне с контактной частью роликов 14 и 15.
На кронштейнах 3 и 4 просверлены 8 пар отверстий 21 и 22 под пальцы 13 для обеспечения перестановки роликов 14, 15, 16 и 17 на требуемый размер DH дренажной трубы. Отверстия 21 на кронштейне 3 расположены на одной горизонтальной линии, а на кронштейне 4 отверстия 22 расположены на одной наклонной линии. Расстояния между осями пар отверстий, лежащих нз одной вертикали в собранном устройстве, равны сумме диаметра контактной части ролика и диаметров труб, для укладки которых предназначена машина.
Датчик 19 представляет собой корпус 23 (фиг.З), в котором установлен индуктивный чувствительный элемент 24. В прорези элемента перемещаются лопасти крыльчатки 25, установленной на одном валу с мерным колесом 20.
В состав системы управления кроме устройства для измерения пути входит блок программного управления 26 с задатчиком уклона 27, электрогидравлический распределитель 28, подъемный механизм 29 фотоприемника (датчика высотного положения) 30 с исполнительными гидромотором 31 и датчиком обратной связи 32. В нейтральном положении (отсутствие выходных сигналов) фотоприемник 30 расположен в световой плоскости 33, образуемой лазерным излучателем 34,
В качестве чувствительного элемента 24 и датчика обратной связи 32 используются серийно выпускаемые датчики, в частности бесконтактный преобразователь положения ПИЩ-6-1.
При работе дреноукладочной машины нож рабочего органа прорезает в грунте щель, по дну которой движется трубоукладчик 2. На сформированное дно щели пода0 ется дренажная пластмассовая труба 18, которая принудительно с натяжением сматывается с катушки, установленной на раме машины.
Дренажная труба 18 проходит через
5 датчик пути и далее через приемный лоток 1 попадает в трубоукладчик 2. Для монтажа дренажной трубы подвижный кронштейн 4 откидывается, поворачиваясь относительно неподвижного кронштейна 3 вокруг паль0 цев 7, 8, закрепленных в проушинах 5, 6. Разъединение и соединение кронштейнов друг относительно друга производится болтами 9, 10 с гайками 11, 12. При перемещении через датчик пути дренажная труба
5 выпрямляется между роликами и мерное колесо 20 датчика пути 19 катится по выпрямленному участку трубы. При вращении мерного колеса 20 происходит перемещение крыльчатки 25 (фиг.З) относительно чув0 ствительного элемента 24, установленного внутри корпуса 23 датчика 19. Датчик выдает электрические сигналы о количестве укладываемой дренажной трубы (пройденного пути). При этом в связи с измерением длины
5 дренажной трубы на выпрямленном участке ее погрешность измерения будет минимальная.
Электрические сигналы с датчика пути поступают в блок программного управления
0 16, откуда сигналы подаются на включение электромагнитов электрогидрораспредели- теля 28. Включение гидрораспределителя приводит к отработке гидромотора 31 подъ- емного механизма 29. Отработка гидромо5 тора будет происходит до тех пор, пока имеет место рассогласование сигналов с за- датчика уклона, датчика пути и датчика обратной связи 32, расположенного в подъемном механизме.
0 При отработке гидромотора происходит вертикальное перемещение подвижной штанги подъемного механизма с закрепленным на ней фотоприемником 30 лазерной системы. При смещении фотоприемника 30
5 относительно луча 33 лазера на выходе фотоприемника появляется сигнал на перемещение рабочего органа до тех пор, пока на выходе фотоприемника не исчезнет сигнал. Таким образом, при перемещении дреноукладчика через определенное расстояние
измеренное датчиком пути, происходит ступенчатое вертикальное перемещение рабо- чего органа, величина которого определяется установкой задатчика уклона 27 в блоке программного управления 26. Точность выдерживания уклона такой системы управления зависит от точности измерения пройденного пути. Предлагаемый датчик устраняет условия появления погрешности измерения пройденного пути.
При необходимости использования дренажной трубы другого диаметра ролики выполнены съемными, для чего ролики 14 и 15 (фиг.1,2) при помощи пальцев 13 переставляются в соответствующие отверстия 21, а ролики 16 и 17 - в соответствующие отверстия 22. При этом на кронштейне 3 ролики при перестановке смещаются по горизонтали, что обеспечивает всегда установку обода мерного колеса на одном уровне с контактными частями роликов 14 и 15. В то же время отверстия 22 на кронштейне смещаются по вертикали и горизонтали, что обеспечивает установку роликов на требуемое расстояние с одного размера дренаж- ной трубы на другой.
Предлагаемое устройство разработано в рамках ОКР Разработка систем выдерживания уклона дренажной линии и курса для мелиоративных машин с применением лазерной аппаратуры Диспетчер и УКЛ-2.
Тематический план ВНИИземмаш, заказ 3/53-88, 1988г.
Датчик пути был изготовлен на Опытном заводе ВНИИземмаш и испытан в экспериментальных условиях на бестраншейном дреноукладчике МД-12 на объектах Рязаньмелиорация.
При испытании выявлено значительное снижение погрешности измерений пути и возможность использования устройства для всех типоразмеров дренажных труб, применяемых при строительстве дренажа бестраншейным способом.
Формула изобретения I. Датчик пути, включающий мерное колесо, установленное с возможностью взаимодействия с дренажной трубой, отличающийся тем, что, с целью повышения точности за счет исключения погрешности измерения при изменении линейных размеров трубы, он снабжен подвижным и неподвижным кронштейнами с роликами, установленными с возможностью взаимодействия с дренажной трубой, причем ролики неподвижного кронштейна установлены на одном уровне с мерным ко- лесом под роликами подвижного кронштейна.
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ ВЫЕМКИ | 1922 |
|
SU710A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
