тива при троганиях поездов и при движении по переломам продольного профиля пути.
Цель изобретения - повышение достоверности результатов испытаний за счет более полной имитации условий эксплуатации локомотива.:
Это достигается тем, что в стенд введен реостат, регулируемый источник напряжения, узел моделирования локомотива с составом вагонов, датчик тока якоря нагрузочной электрической машины, датчик угловой скорости вала тягового двигателя, блок прерывания, вспомогательный источник напряжения и контроллер, причем реостат и регулируемый источник напряжения включены последовательно в цепь обмотки якоря нагрузочной электрической машины, входы узла моделирования соединены с выходами обоих датчиков и первым выходом контроллера, а выход - со входом регулируемого источника напряжения и первым входом блока прерывания, второй выход контроллера подключен ко входу системы питания, а выход вспомогательного источника подключен ко второму входу блока прерывания, выход которого включен на контакты обмотки независимого возбуждения нагрузочной электрической машины,
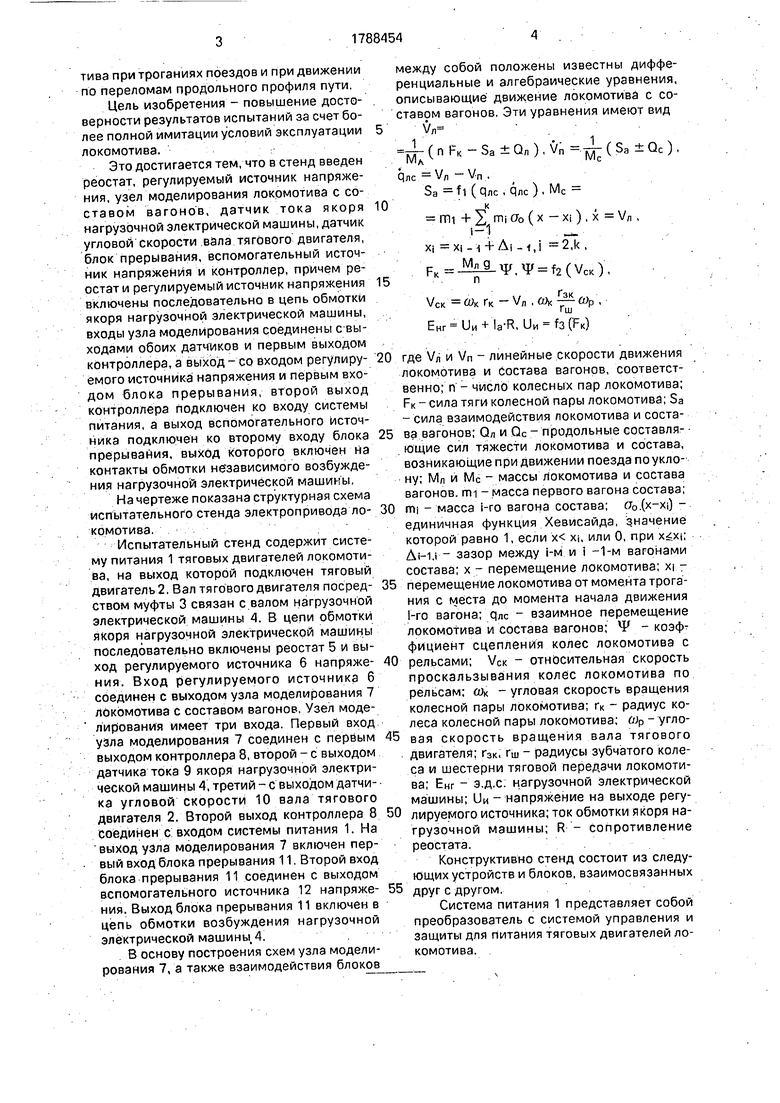
На чертеже показана структурная схема испытательного стенда электропривода локомотива.
Испытательный стенд содержит систему питания 1 тяговых двигателей локомотива, на выход которой подключен тяговый двигатель 2. Вал тягового двигателя посредством муфты 3 связан с валом нагрузочной электрической машины 4. В цепи обмотки якоря нагрузочной электрической машины последовательно включены реостат 5 и выход регулируемого источника 6 напряжения. Вход регулируемого источника б соединен с выходом узла моделирования 7 локомотива с составом вагонов. Узел моделирования имеет три входа. Первый вход узла моделирования 7 соединен с пербым выходом контроллера 8, второй - с выходом датчика тока 9 якоря нагрузочной электрической машины 4, третий - с выходом датчика угловой скорости 10 вала тягового двигателя 2, Второй выход контроллера 8 соединен с входом системы питания 1. На выход узла моделирования 7 включен первый вход блока прерывания 11. Второй вход блока прерывания 11 соединен с выходом вспомогательного источника 12 напряжения. Выход блока прерывания 11 включен в цепь обмотки возбуждения нагрузочной электрической машины,4.
В основу построения схем узла моделирования 7, а также взаимодействия блоков
0
5
между собой положены известны дифференциальные и алгебраические уравнения, описывающие движение локомотива с составом вагонов. Эти уравнения имеют вид
. : f(nPK-Sa±Qn),Vn.-(Sa±Qc),
0,лс Ул - Vn..
Sa fl (Рлс , Яле). Mc
к ГГИ + У m i Ob ( х - xi ) , x Ул ,
t I
xj xi-i + Aj-i,j 2,k, , f2(VCK),
VCK ГК - Vn , С0к Wp ,
Гш
Енг Уи + la R, UM f3 (FK)
где Vn и Vn - линейные скорости движения локомотива и состава вагонов, соответственно; п - число колесных пар локомотива; FK - сила тяги колесной пары локомотива; За - сила взаимодействия локомотива и состава вагонов; Ол и Qc - продольные составляющие сил тяжести локомотива и состава, возникающие при движении поезда по уклону; Мл и Мс - массы локомотива и состава вагонов, mi - масса первого вагона состава;
mi - масса 1-го вагона состава; a0.(x-xi) - единичная функция Хевисайда, значение которой равно 1, если х хк или 0, при АМН зазор между i-м и i -1-м вагонами состава; х - перемещение локомотива; xi перемещение локомотива от момента трога- ния с места до момента начала движения 1-го вагона; рлс - взаимное перемещение локомотива и состава вагонов; Ч - коэффициент сцепления колес локомотива с
рельсами; VCK - относительная скорость проскальзывания колес локомотива по рельсам; Uk - угловая скорость вращения колесной пары локомотива; гк - радиус колеса колесной пары локомотива; шр - угло
вая скорость вращения вала тягового
двигателя; г3к, гш - радиусы зубчатого колеса и шестерни тяговой передачи локомотива; Енг - э.д.с. нагрузочной электрической машины; 1)и - напряжение на выходе регулируемого источника; ток обмотки якоря нагрузочной машины; R - Сопротивление реостата.
Конструктивно стенд состоит из следующих устройств и блоков, взаимосвязанных
друг с другом.
Система питания 1 представляет собой преобразователь с системой управления и защиты для питания тяговых двигателей локомотива.
Тяговый двигатель 2 представляет собой двигатель постоянного или переменного тока (в зависимости от типа системы питания), обеспечивающий тягу локомотива.
Муфта 3 - соединительное устройство, передающее вращающий момент от тягового двигателя 2 нагрузочной электрической машине 4..
Нагрузочная электрическая машина 4 - электрическая машина постоянного тока независимого возбуждения с мощностью такого же порядка, что и тяговый двигатель
2- .
Реостат 5 - реостат, способный рассеивать преобразованную в тепловую часть энергии, вырабатываемую нагрузочной электрической машиной 4.
Регулируемый источник 6-однофазный источник постоянного напряжения с диапа- . зрном регулирования, определяемым величиной напряжения, вырабатываемого нагрузочной электрической машиной 4.
Узел моделирования 7 локомотива с составом вагонов - устройство на базе блоков вычислительных машин дискретного или непрерывного действия, работающее в реальном.масштабе времени.
Контроллер 8 - контроллер машиниста или его имитатор, задающий режим движения локомотива.
Датчик тока 9 - устройство, преобразующее ток обмотки якоря нагрузочной машины в напряжение - аналог этого тока.
Датчик угловой скорости 10 - тахогене- ратор, преобразующий угловую скорость вращения вала тягового двигателя 2 в напряжение-аналог этой угловой скорости.
Блок прерывания 11 представляет собой устройство, работающее по логической схеме И.
Вспомогательный источник 12 напряжения - однофазный источник постоянного напряжения, питающий независимую обмотку возбуждения нагрузочной электрической машины 4.
Стенд в соответствии с характером движения реального локомотива с составом вагонов имитирует следующие режимы: трогание с места, движение в режиме тяги с определенной скоростью, буксование колесных пар локомотива.
При трогании с места поезда локомотиву необходимо развить тяговое усилие от нуля до некоторого значения в течение требуемого промежутка времени, обеспечивающее разгон поезда определенной массы на любом прямолинейном в плане участке продольного профиля пути до некоторой скорости при условии, что усилия в автосцепных устройствах не превысят нормативных значений.
Имитация трогания с места осуществляется следующим образом. По сигналу извне 5 контроллер 8 подает сигнал пуска в ход локомотива, обеспечивающий заданный закон изменения скорости, на выходы системы питания 1 и узла моделирования 7 локомотива с составом вагонов. Получив
0 этот сигнал, система питания 1 формирует токи и напряжения, которые, поступая на тяговый двигатель 2. обеспечивают его разгон. Тяговый двигатель 2 посредством муфты 3 . вращает якорь нагрузочной
5 электрической машины 4. Машина 4, работая в режиме генератора постоянного тока и имея независимое возбуждение, имитирует нагрузки на вал тягового двигателя 2 изменением нагрузочного момента.
0 Нагрузочный момент машины 4 определяется величиной тока обмотки якоря, который зависит от величины реостата 5 и напряжения регулируемого источника 6.
С другой стороны, получив сигнал от
5 контроллера 8, узел моделирования 7 вырабатывает управляющий сигнал, обеспечивающий изменение силы тяги колесной пары локомотива в соответствии с изменением скорости, и передает его на входы регулиру0 емого источника б напряжения и блока прерывания 11.
Блок прерывания 11 работает на логической схеме И, т.е., если на вход 1 подается ненулевой сигнал, то напряжение всп омога 5 тельного источника 12 поступит на независимую обмотку возбуждения нагрузочной электрической машины 4. Таким образом, получив с выхода узла моделирования 7 управляющий сигнал на вход 1, блок прерыва0 ния 11 передает поступившее на его вход 2 напряжение вспомогательного источника 12 на обмотку возбуждения нагрузочной машины 4. Нагрузочная машина 4 начинает работать как генератор постоянного тока и
5 создает нагрузочный момент на валутягово-. го двигателя 2.
Регулируемый источник 6, получивший на вход сигнал от узла моделирования 7, вырабатывает напряжение с полярностью, проти0 воположной полярности напряжения, вырабатываемого нагрузочной машиной 4, и частично компенсирующее это напряжение, за счет чего осуществляется управление током якоря, а следовательно и нагрузочным
5 моментом машины 4, через реостат 5.
Таким образом, тяговый двигатель 2 нагружается электрической машиной 4, при этом нагрузочный момент пропорционален силе тяги колесной пары локомотива с уче- том условий его движения. При этом силу
тяги локомотива и условия его движения имитирует узел моделирования 7 в соответствии с уравнениями, приведенными выше.
Обратная связь при работе стенда осуществляется при помощи датчиков 9 и 10. На основании сигналов датчика тока 9 якоря нагрузочной машины и датчика угловой скорости 10 вала тягового двигателя узел моделирования 7 осуществляет контроль за имитацией трогания с места. Когда скорость вращения вала тягового двигателя 2 станет соответствовать требуемому значению скорости движения локомотива, то имитация процесса трогания с места локомотива с составом вагонов считается завершенной.
В режиме тяги локомотиву необходимо реализовать тяговое усилие, обеспечивающее движение поезда определенной массы на любом прямолинейном в плане участке продольного профиля пути с заданной скоростью.
При этом имитация указанного режима движения на стенде осуществляется следующим образом. В отличие от имитации режима трогания, по сигналу извне контроллер 8 подает сигнал не пуска в ход, а движения с заданной скоростью на выходы системы питания. 1 и узла моделирования 7. В соответствии с ним узел моделирования
7 вырабатывает сигнал, пропорциональный иё изменению силы тяги в соответствии с изменением скорости, а величина силы тяги колесной пары, соответствующей заданной скорости. Взаимодействие остальных элементов стенда осуществляется таким же способом, как и при имитации трогания с места.
Буксование колесных пар возникает при резком уменьшении сил трения на контакте колеса с рельсами или при чрезмерном сопротивлении состава движению и приводит к резкому снижению силы тяги и возрастанию скорости вращения колес. Поскольку буксование может иметь место при трогании поезда или его движении в режиме тяги с заданной скоростью, то имитация буксования может начинаться либо с имитации трогания, либо с имитации режима тяги;
По внешнему сигналу контроллер 8 выра-. батьшает управляющий сигнал и подает его на выходы системы питания 1 и узла моделирования 7 локомотива с составом вагонов. Получив этот сигнал система питания. 1 формирует TokH и напряжения, которые, поступая на тяговый двигатель 2, который, вырабатывая момент/через муфту 3 вращает еал нагрузочной электрической машины 4,
Однов рёмённо , получив от контроллера
8 входной сигнал, узел моделирования 7 в соответствий с;изменением признака наличия буксования вырабатывает нулевой выходной сигнал, имитирующий исчезновение силы тяги при буксовании, и передает его на выходы блока прерывания 11 и регулируе5 мого источника 6 напряжения.
Поскольку на вход блока-прерывания 11 подается нулевой сигнал, этот блок отключает вспомогательный источник 12 напряжения, от независимой обмотки
0 возбуждения нагрузочной машины 4.
Таким образом, электрическая машина
4 не создает нагрузочного момента на валу
тягового двигателя 2. Тяговый двигатель 2
оказывается нагруженным только инерцией
5 вращающихся масс нагрузочной машины А. Скорость вращения тягового двигателя 2 в ; этом случае резко возрастает, т.е. происходит имитация буксования колесной пары. Выход из режима буксования осуществ0 ляется изменением признака наличия буксования в узле моделирования 7, по которому этот узел начинает вырабатывать ненулевой выходной сигнал, пропорциональный силе тяги колесной пары той же
5 величины, которая предшествовала буксо- ванию. Далее стенд имитирует режим, пред-, шествующий буксованию,.
В процессе работы стенда в режимах трогания с места, тяги.и буксования регист:
0 рирующим устройством (не показано), запит. сываются процессы изменения напряжений - аналогов усилий в элементах . привода,;а также изменение токов и напряжений в Системе питания и тяговом двигате5 ле. . .. -
Таким образом, имитация трогания с
места, движения в режиме тяги локомотива
с составом вагонов и буксования колесных
пар локомотива позволяет приблизить ис0 пытания электропривода локомотива к реальным эксплуатационным условиям, что дает возможность получить более достовермые результаты испытаний.
5 Ф о р м у л а и з о б р е т е н и я
Испытательный стенд электропривода локомотива, содержащий подключенный к системе питания тяговый двигатель, вал которого посредством муфты связан с валом
0 нагрузочной электрической машины, имитирующей Тяговую нагрузку, отличающийся тем, что, с целью повышения достоверности испытаний за счет более полной имитации условий эксплуатации электропривода, в него
5 введены реостат, регулируемый источник напряжения, узел моделирования локомотива с составом вагонов, датчик тока якоря нагрузочной электрической машины, датчик угловой скорости вала тягового-двигателя, блок прерывания, вспомогательный источник напряжения и контроллер, причем реостат и регулируемый источник напряжения включены последовательно в цепь обмотки якоря нагрузочной электрической машины, входы узла моделирования соединены с выходами обоих датчиков и первым выходом контроллера, а выход - с входом регулируемого источника напряжения и первым входом
блока прерывания, второй выход контроллера подключен к входу системы питания, а выход вспомогательного источника напряжения соединен с вторым входом блока прерывания, выход которого включен на контакты обмотки независимого возбуждения нагрузочной электрической машины.


| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВА С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2012 |
|
RU2496100C1 |
| Установка для искусственного воспроизведения (моделирования) тяги поездов | 1944 |
|
SU67786A1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВОВ С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2013 |
|
RU2550105C1 |
| Стенд для моделирования динамическихпРОцЕССОВ B ТягОВОМ пРиВОдЕ лОКОМОТиВАС элЕКТРОпЕРЕдАчЕй | 1979 |
|
SU823946A1 |
| Способ испытаний локомотива на катковом стенде | 1984 |
|
SU1203396A1 |
| Стенд для моделирования динамических процессов в тяговом приводе локомотива | 1981 |
|
SU1000823A1 |
| Стенд для моделирования динамических процессов в тяговом приводе локомотива с электропередачей | 1978 |
|
SU712726A1 |
| УСТРОЙСТВО ДЛЯ УВЕЛИЧЕНИЯ СЦЕПЛЕНИЯ КОЛЕСНОЙ ПАРЫ ТЕПЛОВОЗА С РЕЛЬСАМИ | 2007 |
|
RU2340491C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| Тепловоз | 1930 |
|
SU37741A1 |

Ъ
е
8
LUa
К
А
5
ш
9
