Изобретение относится к измерительным средствам для систем автоматического управления и может быть использовано в обучаемых системах управления, в которых осуществляется контроль положения, скорости и ускорения подвижных объектов.
Известны датчики перемещения, содержащие фотодетекторы и предназначенные для учета положения подвижных объектов.
Наиболее близким к изобретению техническим решением является рецепторный датчик положения для обучаемой системы управления, содержащий неподвижную мерную линейку с рецепторами в виде фотоэлектрических элементов.
Недостатком казанных технических решений является -о, что они предназначены для учета лишь положения подвижного
объекта (светового пятна), но не способны учитывать скорость и ускорение объекта.
Целью данного изобретения является расширение информационных возможностей датчика перемещения за счет учета скоростей и ускорений подвижного объекта.
Поставленная цель достигается тем, что датчик перемещения содержит три группы фотоэлектрических элементов, при этом постоянные времени Ti, T2 и Тз фотоэлектрических элементов соответственно первой, второй и третьей групп должны удовлетворять условиям
hl/Vmax
Ti Т2
-ln(1 -Ь (1)/Ьт1х ) Г12/Усл1п
ГГ) (ТГ
-|П(1 -b Vbmax )
N оо
00
N о
О «Р
Т3 2 Т2
пз In 1 - b
(2))Л
/Dmax J
h2 , Ч In ( 1 - b/bmax )
где hi, h2, Нз - шаг расположения фотоэлектрических элементов соответственно первой, второй и третьей групп,
b 2 b® - пороговые значения возбуждения фотоэлектрических элементов соответственно, первой, второй и третьей групп,
bmax(2l bmax - максимальные значения возбуждений фотоэлектрических элементов соответственно первой, второй и третьей групп,
Vmin, Vmax - минимальная и максимальная учитываемые скорости перемещения объекта,
а количество фотоэлектрических элементов Ш, П2 и пз соответственно первой, второй и третьей групп, охваченных световым пятном, должно удовлетворять условиям
..,n(l.b(fl/bmax(1)),
П2 Vma T2-- Ш(1 - Ь®/Ьтах(2)), h2
пз ах Тз . , . b(3)/bmax(3Y .
ris
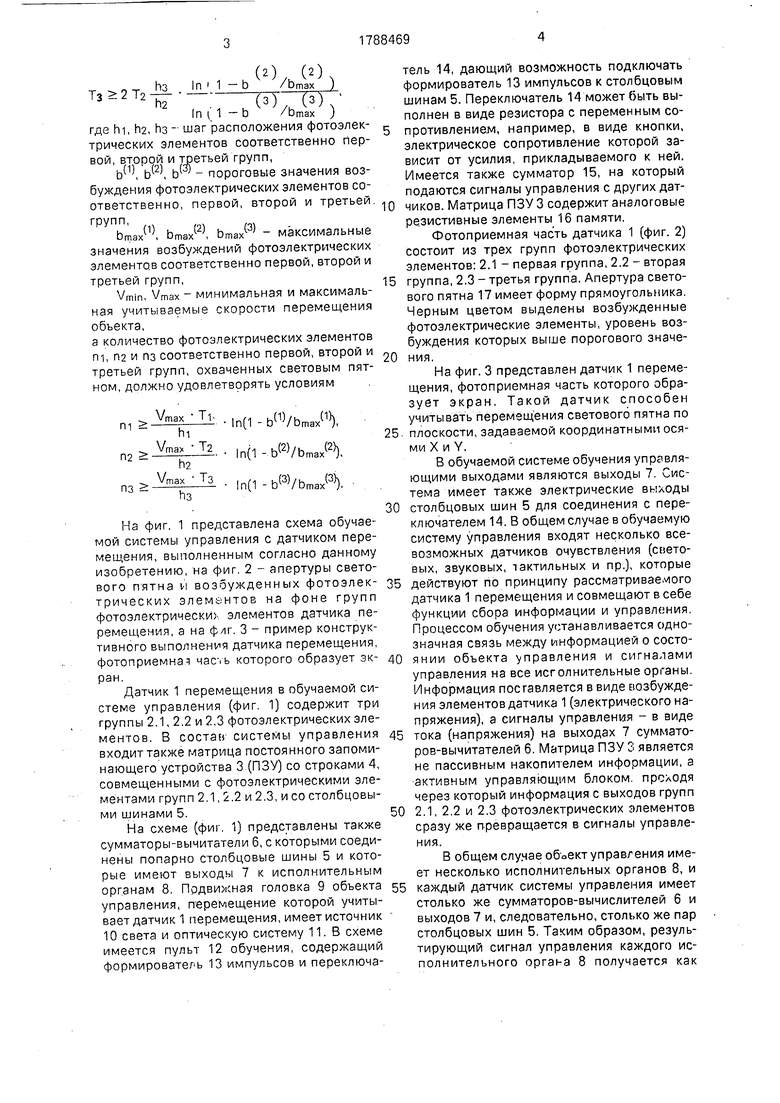
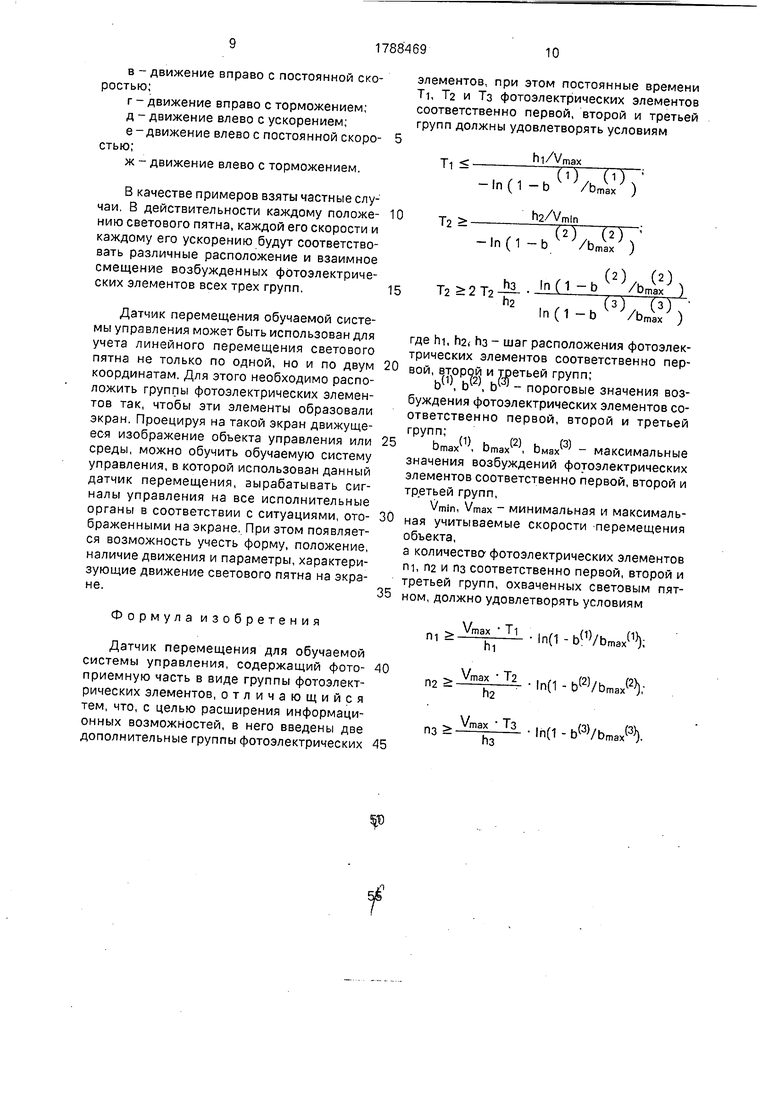
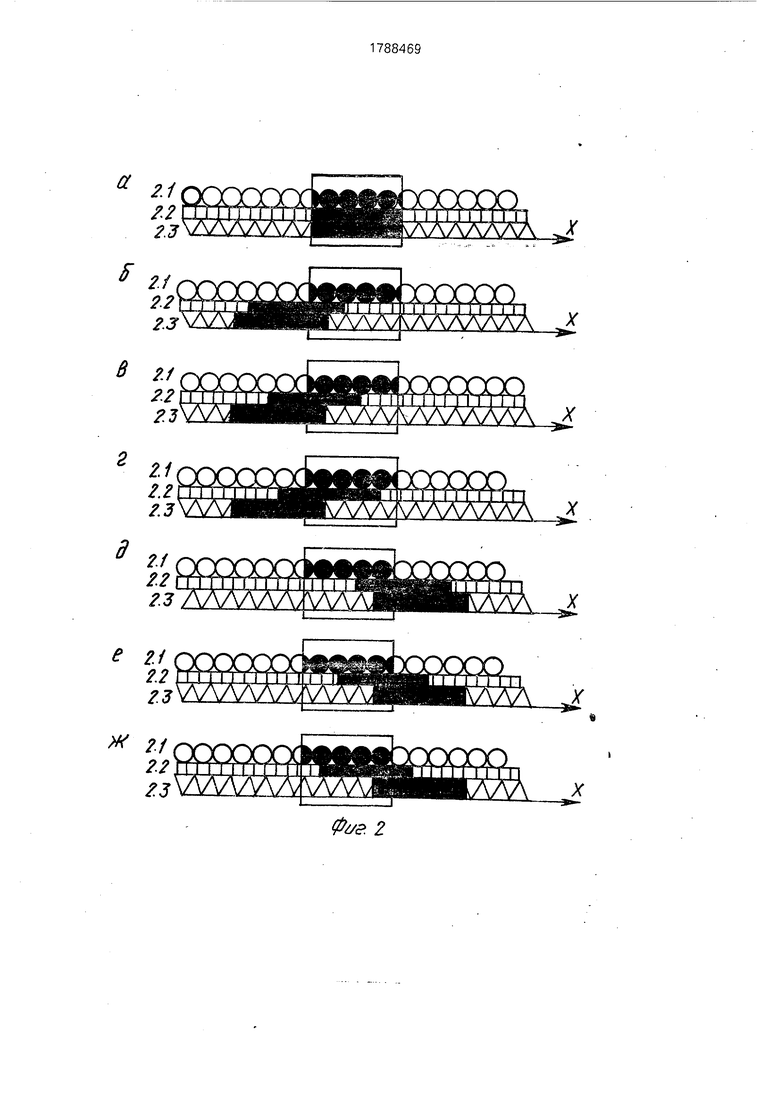
На фиг. 1 представлена схема обучаемой системы управления с датчиком перемещения, выполненным согласно данному изобретению, на фиг. 2 - апертуры светового пятна vi возбужденных фотоэлектрических элементов на фоне групп фотоэлектрических элементов датчика перемещения, а на ф./1г. 3 - пример конструктивного выполнения датчика перемещения, фотоприемная часть которого образует экран.
Датчик 1 перемещения в обучаемой системе управления (фиг. 1) содержит три группы 2.1, 2.2 и 2.3 фотоэлектрических элементов. В состав системы управления входит также матрица постоянного запоминающего устройства 3 (ПЗУ) со строками 4, совмещенными с фотоэлектрическими элементами групп 2.1,2.2 и 2.3, и со столбцовыми шинами 5.
На схеме (фиг. 1) представлены также сумматоры-вычитатели 6, с которыми соединены попарно столбцовые шины 5 и которые имеют выходы 7 к исполнительным органам 8. Подвижная головка 9 объекта управления, перемещение которой учитывает датчик 1 перемещения, имеет источник 10 света и оптическую систему 11. В схеме имеется пульт 12 обучения, содержащий формирователь 13 импульсов и переключатель 14, дающий возможность подключать формирователь 13 импульсов к столбцовым шинам 5. Переключатель 14 может быть выполнен в виде резистора с переменным сопротивлением, например, в виде кнопки, электрическое сопротивление которой зависит от усилия, прикладываемого к ней. Имеется также сумматор 15, на который подаются сигналы управления с других дат0 чиков. Матрица ПЗУ 3 содержит аналоговые резистивные элементы 16 памяти.
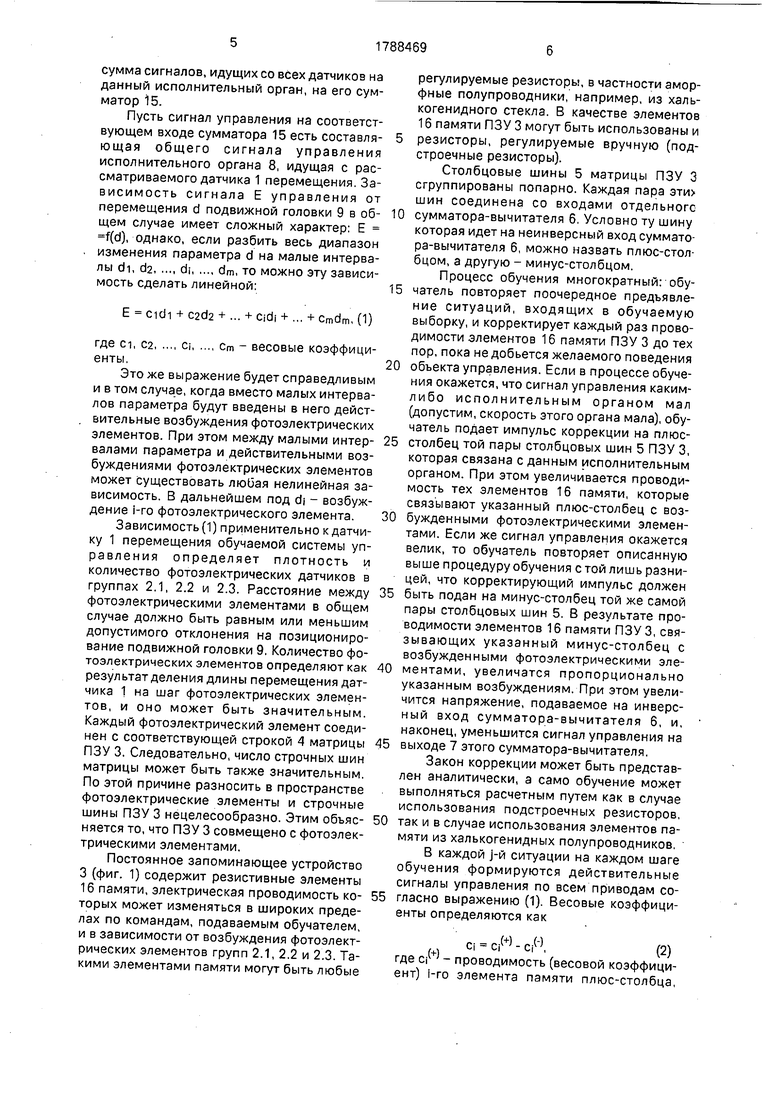
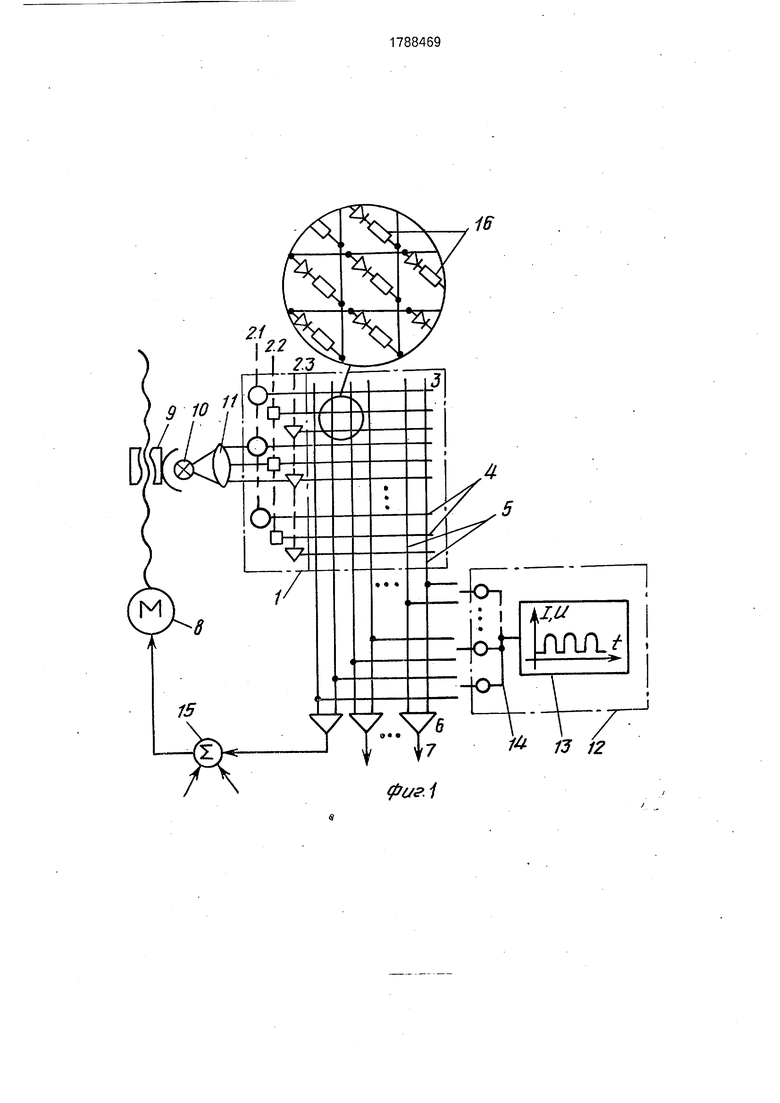
Фотоприемная часть датчика 1 (фиг. 2) состоит из трех групп фотоэлектрических элементов: 2.1 - первая группа, 2,2 - вторая
5 группа, 2.3 -третья группа. Апертура светового пятна 17 имеет форму прямоугольника. Черным цветом выделены возбужденные фотоэлектрические элементы, уровень возбуждения которых выше порогового значе0 ния.
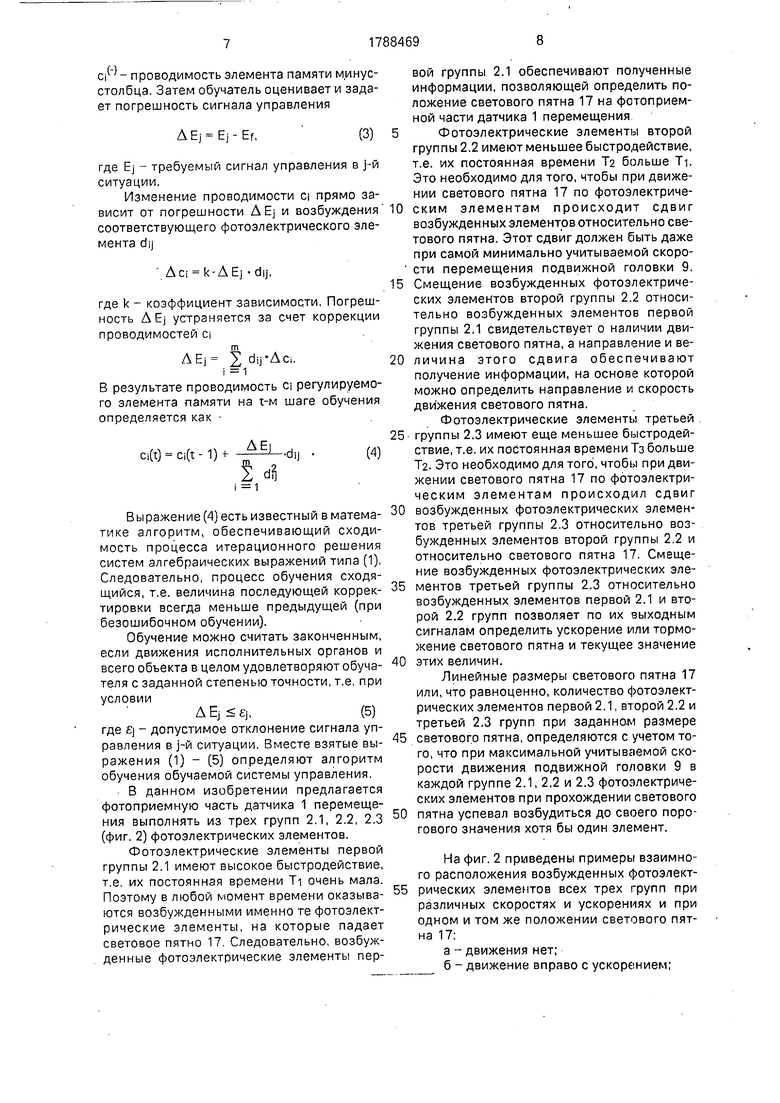
На фиг. 3 представлен датчик 1 перемещения, фотоприемная часть которого образует экран. Такой датчик способен учитывать перемещения светового пятна по
5. плоскости, задаваемой координатными осями X и Y.
В обучаемой системе обучения управляющими выходами являются выходы 7. Система имеет также электрические выходы
0 столбцовых шин 5 для соединения с переключателем 14. В общем случае в обучаемую систему управления входят несколько всевозможных датчиков очувствления (ctseTO- вых, звуковых, тактильных и пр.), которые
5 действуют по принципу рассматриваемого датчика 1 перемещения и совмещают в себе функции сбора информации и управления. Процессом обучения устанавливается однозначная связь между информацией о состо0 янии объекта управления и сигналами управления на все исголнительные органы. Информация поставляется в виде возбуждения элементов датчика 1 (электрического напряжения), а сигналы управления - в виде
5 тока (напряжения) на выходах 7 суммато- ров-вычитателей 6. Матрица ПЗУ 3 является не пассивным накопителем информации, а активным управляющим блоком, проходя через который информация с выходов групп
0 2.1, 2.2 и 2.3 фотоэлектрических элементов сразу же превращается в сигналы управления.
В общем случае объект управления имеет несколько исполнительных органов 8, и
5 каждый датчик системы управления имеет столько же сумматоров-вычислителей 6 и выходов 7 и, следовательно, столько же пар столбцовых шин 5, Таким образом, результирующий сигнал управления каждого исполнительного органа 8 получается как
сумма сигналов, идущих со всех датчиков на данный исполнительный орган, на его сумматор 15.
Пусть сигнал управления на соответствующем входе сумматора 15 есть составляющая общего сигнала управления исполнительного органа 8, идущая с рассматриваемого датчика 1 перемещения. Зависимость сигнала Е управления от перемещения d подвижной головки 9 в общем случае имеет сложный характер: Е f(d), однако, если разбить весь диапазон изменения параметра d на малые интервалы di, da, .... di, ..., dm, то можно эту зависимость сделать линейной:
Е Cldl + C2d2 + ... + Cidi + ... + Cmdm, (1)
где ci, C2, .... Ci, ..., Cm - весовые коэффициенты.
Это же выражение будет справедливым и в том случае, когда вместо малых интервалов параметра будут введены в него действительные возбуждения фотоэлектрических элементов. При этом между малыми интервалами параметра и действительными возбуждениями фотоэлектрических элементов может существовать любая нелинейная зависимость. В дальнейшем под di - возбуждение i-ro фотоэлектрического элемента.
Зависимость (1) применительно к датчику 1 перемещения обучаемой системы управления определяет плотность и количество фотоэлектрических датчиков в группах 2.1, 2.2 и 2.3. Расстояние между фотоэлектрическими элементами в общем случае должно быть равным или меньшим допустимого отклонения на позиционирование подвижной головки 9. Количество фотоэлектрических элементов определяют как результат деления длины перемещения датчика 1 на шаг фотоэлектрических элементов, и оно может быть значительным. Каждый фотоэлектрический элемент соединен с соответствующей строкой 4 матрицы ПЗУ 3. Следовательно, число строчных шин матрицы может быть также значительным. По этой причине разносить в пространстве фотоэлектрические элементы и строчные шины ПЗУ 3 нецелесообразно. Этим объясняется то, что ПЗУ 3 совмещено с фотоэлектрическими элементами.
Постоянное запоминающее устройство 3 (фиг. 1) содержит резистивные элементы 16 памяти, электрическая проводимость которых может изменяться в широких пределах по командам, подаваемым обучателем, и в зависимости от возбуждения фотоэлектрических элементов групп 2.1, 2.2 и 2.3. Такими элементами памяти могут быть любые
регулируемые резисторы, в частности аморфные полупроводники, например, из халь- когенидного стекла. В качестве элементов 16 памяти ПЗУ 3 могут быть использованы и
резисторы, регулируемые вручную (под- строечные резисторы).
Столбцовые шины 5 матрицы ПЗУ 3 сгруппированы попарно. Каждая пара эти шин соединена со входами отдельного
сумматора-вычитателя 6. Условно ту шину которая идет на неинверсный вход сумматора-вычитателя 6, можно назвать плюс-столбцом, а другую - минус-столбцом.
Процесс обучения многократный: обучатель повторяет поочередное предъявление ситуаций, входящих в обучаемую выборку, и корректирует каждый раз проводимости элементов 16 памяти ПЗУ 3 до тех пор, пока не добьется желаемого поведения
объекта управления. Если в процессе обучения окажется, что сигнал управления каким- либо исполнительным органом мал (допустим, скорость этого органа мала), обу- чатель подает импульс коррекции на плюсстолбец той пары столбцовых шин 5 ПЗУ 3, которая связана с данным исполнительным органом. При этом увеличивается проводимость тех элементов 16 памяти, которые связывают указанный плюс-столбец с возбужденными фотоэлектрическими элементами. Если же сигнал управления окажется велик, то обучатель повторяет описанную выше процедуру обучения с той лишь разницей, что корректирующий импульс должен
быть подан на минус-столбец той же самой пары столбцовых шин 5. В результате проводимости элементов 16 памяти ПЗУ 3, связывающих указанный минус-столбец с возбужденными фотоэлектрическими элементами, увеличатся пропорционально указанным возбуждениям. При этом увеличится напряжение, подаваемое на инверсный вход сумматора-вычитателя 6, и, наконец, уменьшится сигнал управления на
выходе 7 этого сумматора-вычитателя.
Закон коррекции может быть представлен аналитически, а само обучение может выполняться расчетным путем как в случае использования подстроечных резисторов,
так и в случае использования элементов памяти из халькогенидных полупроводников. В каждой j-й ситуации на каждом шаге обучения формируются действительные сигналы управления по всем приводам согласно выражению (1). Весовые коэффициенты определяются как
с, ci« (2)
. .V,, 1 V-I ,
где сг - проводимость (весовой коэффициент) 1-го элемента памяти плюс-столбца,
с, - проводимость элемента памяти минус- столбца. Затем обучатель оценивает и задает погрешность сигнала управления
AEj Ej-Ef,
где EJ - требуемый сигнал управления в j-й ситуации.
Изменение проводимости ci прямо зависит от погрешности AEj и возбуждения соответствующего фотоэлектрического элемента dy
Aci k-AEj -dij,
где k - коэффициент зависимости. Погрешность AEj устраняется за счет коррекции проводимостеи с;
AEj §
dii Aci.
В результате проводимость ci регулируемого элемента памяти на т-м шаге обучения определяется как ci(t) ci(t -1) + - --d.j
S rt
i 1
Выражение (4) есть известный в математике алгоритм, обеспечивающий сходимость процесса итерационного решения систем алгебраических выражений типа (1). Следовательно, процесс обучения сходящийся, т.е. величина последующей корректировки всегда меньше предыдущей (при безошибочном обучении).
Обучение можно считать законченным, если движения исполнительных органов и всего объекта в целом удовлетворяют обуча- теля с заданной степенью точности, т.е. при условии
,(5) где Е - допустимое отклонение сигнала управления в j-й ситуации. Вместе взятые выражения (1) - (5) определяют алгоритм обучения обучаемой системы управления.
В данном изобретении предлагается фотоприемную часть датчика 1 перемещения выполнять из трех групп 2.1, 2.2, 2.3 (фиг. 2) фотоэлектрических элементов.
Фотоэлектрические элементы первой группы 2.1 имеют высокое быстродействие, т.е. их постоянная времени Ti очень мала. Поэтому в любой момент времени оказываются возбужденными именно те фотоэлектрические элементы, на которые падает световое пятно 17. Следовательно, возбужденные фотоэлектрические элементы пер5
10
15
20
25
30
35
40
45
50
55
вой группы 2.1 обеспечивают полученные информации, позволяющей определить положение светового пятна 17 на фотоприемной части датчика 1 перемещения
Фотоэлектрические элементы второй группы 2.2 имеют меньшее быстродействие, т.е. их постоянная времени Т2 больше TL Это необходимо для того, чтобы при движении светового пятна 17 по фотоэлектрическим элементам происходит сдвиг возбужденных элементов относительно светового пятна. Этот сдвиг должен быть даже при самой минимально учитываемой скорости перемещения подвижной головки 9. Смещение возбужденных фотоэлектрических элементов второй группы 2.2 относительно возбужденных элементов первой группы 2.1 свидетельствует о наличии движения светового пятна, а направление и величина этого сдвига обеспечивают получение информации, на основе которой можно определить направление и скорость движения светового пятна.
Фотоэлектрические элементы третьей группы 2.3 имеют еще меньшее быстродействие, т.е. их постоянная времени Тз больше Та. Это необходимо для того, чтобы при движении светового пятна 17 по фотоэлектрическим элементам происходил сдвиг возбужденных фотоэлектрических элементов третьей группы 2.3 относительно возбужденных элементов второй группы 2.2 и относительно светового пятна 17. Смещение возбужденных фотоэлектрических элементов третьей группы 2.3 относительно возбужденных элементов первой 2.1 и второй 2.2 групп позволяет по их выходным сигналам определить ускорение или торможение светового пятна и текущее значение этих величин.
Линейные размеры светового пятна 17 или, что равноценно, количество фотоэлектрических элементов первой 2.1, второй 2.2 и третьей 2.3 групп при заданном размере светового пятна, определяются с учетом того, что при максимальной учитываемой скорости движения подвижной головки 9 в каждой группе 2.1, 2.2 и 2.3 фотоэлектрических элементов при прохождении светового пятна успевал возбудиться до своего порогового значения хотя бы один элемент.
На фиг. 2 приведены примеры взаимного расположения возбужденных фотоэлектрических элементов всех трех групп при различных скоростях и ускорениях и при одном и том же положении светового пятна 17:
а - движения нет;
б - движение вправо с ускорением;
в -движение вправо с постоянной скоростью;
г - движение вправо с торможением;
д - движение влево с ускорением;
е-движение влево с постоянной скоро- стью;
ж - движение влево с торможением.
В качестве примеров взяты частные случаи. В действительности каждому положе- нию светового пятна, каждой его скорости и каждому его ускорению будут соответствовать различные расположение и взаимное смещение возбужденных фотоэлектрических элементов всех трех групп.
Датчик перемещения обучаемой системы управления может быть использован для учета линейного перемещения светового пятна не только по одной, но и по двум координатам, Для этого необходимо расположить группы фотоэлектрических элементов так, чтобы эти элементы образовали экран. Проецируя на такой экран движущееся изображение объекта управления или среды, можно обучить обучаемую систему управления, в которой использован данный датчик перемещения, зырабатывать сигналы управления на все исполнительные органы в соответствии с ситуациями, отображенными на экране, При этом появляется возможность учесть форму, положение, наличие движения и параметры, характеризующие движение светового пятна на экране.
Формула изобретения
Датчик перемещения для обучаемой системы управления, содержащий фото- приемную часть в виде группы фотоэлектрических элементов, отличающийся тем, что, с целью расширения информационных возможностей, в него введены две дополнительные группы фотоэлектрических
элементов, при этом постоянные времени Ti, Tz и Тз фотоэлектрических элементов соответственно первой, второй и третьей групп должны удовлетворять условиям
Ti hi/V,
max
-ln(1 -b (Vbmax )
T2 h2/V,
min
(2)(2) -ln(1 -b. Vbmax )
(2) (2)
T h3 . In ( 1 - b /bmax ) ,
ln(1-b Vbmix )
где hi, h2 пз - шаг расположения фотоэлектрических элементов соответственно первой, второй и третьей групп;
b , b - пороговые значения возбуждения фотоэлектрических элементов соответственно первой, второй и третьей групп;
bmax, brnax, Ьмах максимальные
значения возбуждений фотоэлектрических элементов соответственно первой, второй и третьей групп,
Vmin, Vmax - минимальная и максимальная учитываемые скорости перемещения объекта,
а количества фотоэлектрических элементов гм, П2 и пз соответственно первой, второй и третьей групп, охваченных световым пят- ном, должно удовлетворять условиям
Ушах Л
ln(l-b(1Vbmax(1));
Vma Т2 Щ(1 - ЬИ/Ьтах(2).- П2
Vma Тз 1п(1 - b 3Vbmax(3)).
ПЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| Рецепторный датчик положения обучаемой системы управления | 1985 |
|
SU1352456A1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2068575C1 |
| ТЕХНИЧЕСКАЯ НЕРВНАЯ СИСТЕМА | 1997 |
|
RU2128857C1 |
| ОБУЧАЕМОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1990 |
|
RU2030780C1 |
| Обучаемое оптическое устройство управления элементом перемещения | 1988 |
|
SU1647604A1 |
| Обучаемая система управления | 1990 |
|
SU1824625A1 |
| Устройство для контроля технического состояния и функционирования нестандартного приемо-передающего оборудования | 2022 |
|
RU2786537C1 |
| СПОСОБ КОНТРОЛЯ ОБЛЕДЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2392195C2 |
| Способ и устройство автоматизированного структурирования мультикультурных учебных групп | 2016 |
|
RU2618387C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
Изобретение относится к измерительным средствам для систем автоматического управления и может быть использовано в обучаемых системах управления. Цель изобретения - расширение информационных возможностей датчика перемещения за счет учета скоростей и ускорений подвижного объекта. Датчик перемещения для обучаемой системы управления содержит три группы фотоэлектрических элементов, обладающих одинаковым внутри группы и различным в различных группах быстродействием. Постоянные времени фотоэлектрических элементов в каждой из групп, а также количество охваченных световым пятном фотоэлектрических элементов в каждой из групп определяются согласно соответствующим математическим выражениям и зависят от шага расположения, порогового значения возбуждений, максимального значения возбуждений фотоэлектрических элементов каждой из групп, а также от минимальной и максимальной учитываемых скоростей перемещения объекта. 3 ил. ел С
f
Фиг.
| Меркишйн Г.В | |||
| Многооконные оптико- электронные датчики линейных размеров | |||
| - М..: Радио и связь, 1986 | |||
| Рецепторный датчик положения обучаемой системы управления | 1985 |
|
SU1352456A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
