Изобретение относится к автоматическому управлению и может быть использовано для управления роботами, станками и другим оборудованием.
Цель изобретения - расширение функциональных возможностей обучаемых систем управления путем введения взаимовлияния сигналов управления на выходах усилителей.
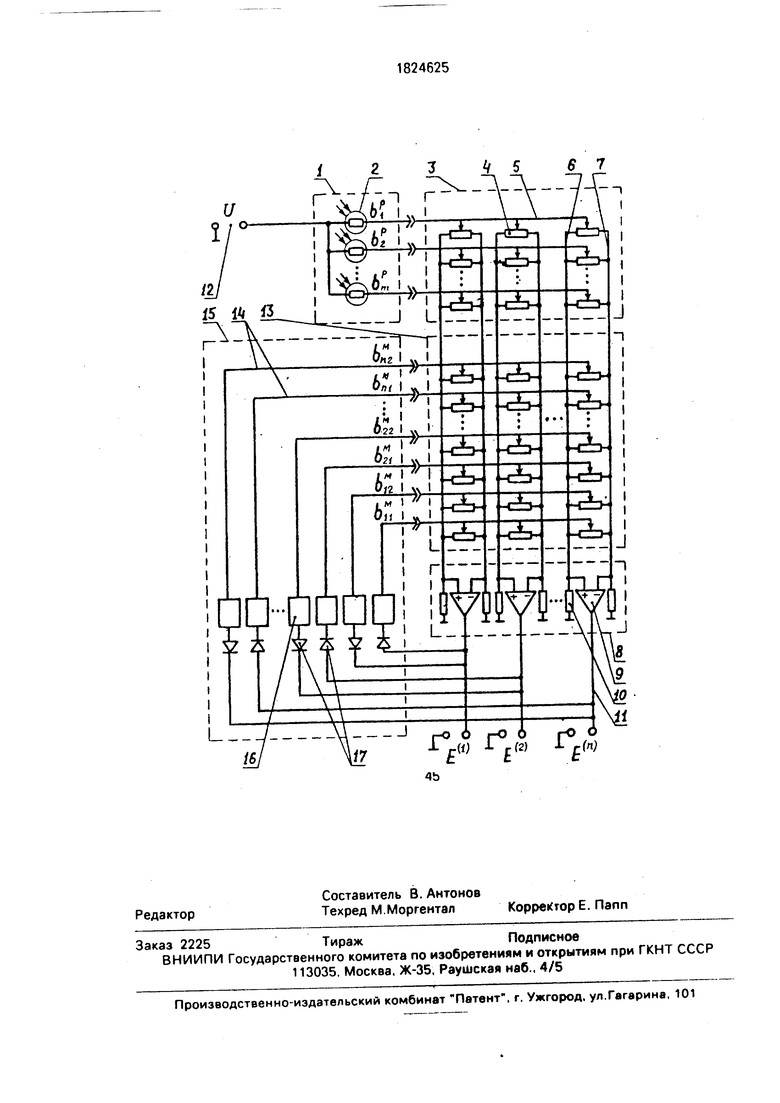
На чертеже представлена принципиальная схема обучаемой системы управления.
Она содержит технические органы чувств 1, состоящие из наборов рецепторов очувствления 2, постоянное запоминающее устройство 3 в виде матрицы аналоговых резисторных элементов памяти 4, строчные шины 5 которой совмещены с рецепторами очувствления 2, а столбцовые шины 6 и 7 объединены попарно,блок усилителей 8, содержащий двуполярные усилители 9, со входами каждого из которых соединены отдельные парные столбцовые шины 6 и 7, каждая столбцовая шина имеет нагрузочный резистор 10. Выходы 11 усилителей 9 являются выходами системы на управляемые исполнительные органы Питание на
рецепторы очувствления 2 подается с источника питания 12 постоянного тока. Система включает также дополнительный блок 13 постоянного запоминающего устройства, столбцовые шины которого соединены со столбцовыми шинами матрицы постоянного запоминающего устройства 3, а строки с помощью канало.в 14 блока внутренних обратных связей 15 - попарно с выходами системы 11. В каждом канале 14 установлены блок задержки 16 и диод 17. Направление проводимости диодов 17 в каналах 14 одной пары обратных связей противоположное.
На схеме указаны обозначения:
U - напряжение источника питания 12;
bip, b2pbmp - токи, проходящие через
фоторезисторы 2 и определяемые сопротивлениями этих резисторов, индекс внизу обозначает порядковый номер рецептора, m - обшее количество рецепторов очувствления; Е , Е ,...,Е П - сигналы управления исполнительными органами обьекта управления (на схеме исполнительные органы не показаны), индекс вверху обозначает поряде
С
N3 О ГО
ел
ковый номер исполнительного органа,п- общее количество исполнительных органов;
biiM, bi2WbniM, bn2M-токи, проходящие по каналам обратных связей, определяемые величинами сигналов управления Е и сопротивлениями потенциометров 4, первый индекс внизу обозначает номер соответствующего исполнительного органа, второй индекс внизу обозначает номер канала в паре каналов обратных связей.
В качестве технических органов чувств 1 могут быть технические глаза, уши, кожа и другие органы в любом соотношении и количестве. Рецепторами очувствления 2 могут быть фоторезисторы, реагирующие на освещенность, переменные резисторы из токопроводящей резины, реагирующие на усилие нажатия, микрофоны с узкой полосой пропускания звуковых частот и т.д. Постоянные запоминающие устройства 3 и 13 выполняют функции технического мозга и имеют вид матрицы. Аналоговый элемент памяти 4 представляет собой потенциометр, концы резистора которого соединены с парными столбцовыми шинами 6 и 7, а скользящий контакт - со строчной шиной 5. Двуполярный усилитель 9 может давать на выходе 11 как положительный, так и отрицательный сигнал управления Е, определяющий скорость исполнительного органа. Питание усилителя на рисунке не показано. Соотношение электрических сопротивлений рецепторов очувствления 2, резисторов потенциометров 4 и нагрузочных резисторов 10 должно быть таким, чтобы исключить появление блуждающих токов в матрице 3. Если технический орган чувств представляет собой глаз, то, очевидно, набор использу- емых при этом фоторезисторов представляет собой сетчатку рецепторов, на которую с помощью объектива проецируется изображение рассматриваемой сцены. Обьектив на рисунке не показан. Объединение каналов 14 в пары и установка в них разнонаправленных диодов 17 вызваны тем, что сигнал на выходе 11 может принимать как положительное, так и отрицательное значение. Такие сигналы управляют исполнительными органами двустороннего действия, например электродвигателями с направлением вращения как в одну, так и в другую сторону. Если же исполнительный орган будет иметь только одно направление действия (например плунжерный гидроцилиндр) и соответственно сигнал управления всегда будет иметь один положительный знак, то вместо пары каналов 14 необходимо оставить только один канал, а диоды из каналов убрать совсем. Блок задержки сигнала 16 предназначен для задержки во
времени сигналов, идущих с выходов 11 на строчные шины 5 матрицы дополнительного блока 13. Сигнал управления Е, выходящий с определенного усилителя 9 и предназначенный для управления соответствующим исп.олнительным органом, может воздействовать через каналы обратной связи 14 и потенциометры 4 на другие усилители 9 и на сигналы управления другими исполнительными органами.
Прежде чем включить обучаемую систему управления в работу, ее необходимо обучить. Рассмотрим процесс обучения на конкретном примере. Допустим, обучаемая
система управления установлена на промышленном роботе, и обучим этот робот поиску заданного предмета среди посторонних. В качестве органа чувств в данном случае используем технический глаз, установленный на схвате робота.
Сначала необходимо определить стратегию поведения робота. Если предметы, среди которых находится искомый, расположены на столе, то поиск можно организовать так, что рука робота с глазом будет перемещаться вдоль стола на определенной высоте и смещаться поперек стола только в том случае, если в поле зрения глаза попал любой предмет. Смещение поперек стола
должно быть всегда в сторону попавшего в поле зрения предмета. Если предмет повернут, то схват с глазом должен при поиске повернуться так, чтобы искомый предмет оказался правильно сориентированным в
поле зрения глаза.
Определим более подробно действия двигателей робота. Тот его двигатель, который перемещает схват и установленный на нем глаз вдоль стола с размещенными на
нем различными предметами должен работать в заданном направлении в тех случаях, когда в поле зрения глаза либо нет предметов, либо есть, но посторонние, и должен остановиться в том случае, когда в поле зрения - сориентированный искомый предмет. Другой двигатель, смещающий схват поперек стола, должен работать в том направлении, с какой стороны в поле зрения глаза попал край любого предмета, и должен остановиться в том случае, если предмет находится в центре поля зрения, Третий двигатель должен вращать схват в ту или иную сторону в зависимости от направления отклонения условной оси предмета относительно условной оси поля зрения глаза, но если искомый предмет находится в заданном положении, то двигатель должен остановиться
Обучение проводят отдельно для каждого двигателя, а затем согласуют совместные действия всех двигателей.
Предварительно пронумеруем все фоторезисторы 2 сетчатки глаза и соответствующие им строки 5 матрицы постоянного запоминающего устройства 3. Расположение фотореэисторов на сетчатке и их нумерация - произвольное. Обучение можно начать с первого двигателя, управление которым осуществляет, допустим, первая пара столбцов 6 и 7 матрицы 3 с сигналом управления . Ситуации в обучаемую вы-- борку подбирают, исходя из стратегии поиска. Перед началом обучения все потенциометры 4 необходимо выставить в средние положения.
Первая ситуация: глаз видит стол без предметов. При этом необходимо замерить
токи biip, bi2pbimp всех фоторезистов 2
технического глаза 1. Измерение можно производить лишь при отсоединенных строках 5, подсоединив разъемы рецепторов 2 к источнику питания 12. Первый индекс внизу обозначает номер ситуации. Как явствует из стратегии поиска, сигнал управления, подаваемый с первой пары столбцов на первый двигатель в первой ситуации, должен быть положительным: Ег 0. Следует оговорить эту величину, но нужно иметь в виду, что она может иметь широкий диапазон или, другими словами, большое допустимое отклонение Ј (Ei(1).
Вторая ситуация: глаз видит посторонний предмет. Необходимо повторить замеры и представить их в виде: Ь21Р,
b22pb2mp. Сигнал управления Е2 в этой
ситуации должен иметь тот же знак, что и в первой ситуации: Е2 О, но величина его может отличаться. Допустимое отклонение е(Е2 Т может быть таким же, как и в первой ситуации: Б (Е2(1)) е (Е /1)).
Третья ситуация: глаз видит искомый предмет в заданном положении. Замеры дадут: Ьз1р. Ьз2рЬзтр. Сигнал управления в
этой ситуации согласно стратегии поиска должен быть равен нулю: Ез -О. Допустимое отклонение е (Ез сигнала управления должно быть настолько малым, чтобы гарантировать остановку первого двигателя, т.е. оно не должно превышать значения сигнала управления, необходимого для преодоления момента трения двигателя. Третья ситуация является целевой в задаче поиска предмета. В общем случае целевых ситуаций для одного предмета может быть несколько с учетом различной ориентации предмета в поле зрения глаза На этом формирование обучаемой выборки для обучения первого двигателя закончено.
На следующем этапе обучения произво- 5 дят расчет порций ei сигнала управления, которые формируются на выходе 11 первой пары столбцовых шин каждым l-ым рецептором 2 и соответствующим ему l-ым потен0 циометром 4. Для этого одну из ситуаций обучаемой выборки принимают за опорную, и далее порции ei пересчил ывают относительно выбранной опорной ситуации; обозначим их через е0(. В качестве опорной
5 удобно выбрать целевую ситуацию Порядок расчета предусматривает поочередное предъявление ситуаций и поочередный расчет порций сигнала управления в пересчете на опорную ситуацию. Расчет итерацион0 ный и повторяется до тех пор, пока ошибка сигнала управления Л Е/1 в каждой ситуации не окажется меньше допустимого отклонения е(Е/0. Исходные значения порций сигнала управления принимают равными
5 нулю.
Порядок расчета.
1. Предъявляют очередную ситуацию и „ определяют фактический сигнал управления:
0
5
Ef(i) у во. . b|L tf ,1V30 boi
где о обозначает опорную ситуацию.
2.Определяют ошибку сигнала управления;
ДЕ(1)Е/1)Е/1).
3.Проверяют условие: ДЕ,ГО е(Е,(10
и, если условие соблюдается, то предъ- Q являют следующую ситуацию; если условие соблюдается во всех ситуациях, то расчет прекращают и значения е0| выводят на печать.
4.Если условие не выполняется, то уточ- с няют значения порций сигнала упрзвлрния
в пересчете на опорную ситуацию
e0i(t)eoi(t-1) + |р- b)i boi
,2
где t - номер данного шага расчета
Расчеты удобно вести на ЭВМ. В результате получают значения e0i для всех рецепторов.
е На следующем этапе обучения производят настройку потенциометров 4. Для этого подсоединяют к строчным шинам 5 все отсоединенные ранее рецепторы 2 Во время настройки все выходы 11 должны быть отсоединены от двигателей. Настройку ведут в опорной ситуации. Для этого располагают перед глазом искомый предмет так лк в
третьей ситуации. Настройка заключается в смещении скользящего контакта каждого потенциометра 4 в ту сторону и на такую величину, которые обеспечивали бы изменение сигнала управления Е на расчетную величину е0| соответствующего 1-го рецептора. Например, согласно расчетов порция сигнала управления 1-го рецептора равна ,12 В, следовательно, нужно сместить скользящий контакт первого потенциометра 4 первой пары столбцовых шин в ту сторону и на столько, чтобы при этом замеряемый с помощью вольтметра сигнал управления н 1 на выходе 11 первого усилителя 9 увеличился на величину 0,12 В. После этого переходят к следующему потенциометру 4 той же пары столбцовых шин, и, если согласно расчетов, например, .08 В, то скользящий контакт 2-го потенциометра 4 смещают в обратную сторону настолько, чтобы сигнал управления уменьшился на 0,08В.
После настройки всех потенциометров 4 первой пары столбцовых шин 6 и 7 матрицы 3 можно провести контрольные замеры. Для этого в той же опорной ситуации при поданном напряжении U источника питания 12 на выходе 11 первого усилителя 9 сигнал управления должен быть равен нулю: . В первой и во второй ситуациях сигнал должен быть больше нуля. Таким образом подтверждается правильность процесса обучения.
После завершения обучения первого двигателя (после настройки потенциометров 4 первой пары столбцовых шин б и 7) переходят к обучению второго и третьего двигателей, руководствуясь при этом принятой стратегией поведения и той же методикой, которая применялась при обучении первого двигателя.
После завершения обучения всех трех двигателей робота переходят к процедуре согласования движений этих двигателей. Но предварительно необходимо определить смысл согласования. Очевидно, во время поиска заданного предмета схват с глазом может перескочить вдоль стола мимо этого предмета, не успев сместиться поперек стола или повернуться до требуемой ориентации предмета. Чтобы устранить такой нежелательный случай, достаточно задать при обучении скорости двигателей поворота схвата и смещения его поперек стола значительно большими, чем скорость двигателя перемещения вдоль стола. Однако при этом снижается скорость поиска.
Предлагаемое новое техническое решение позволяет устранить указанный нежелательный случай не за счет снижения
скорости поиска, а путем согласовании движения всех двигателей. Для этого достаточно предусмотреть снижение скорости движения схвата вдоль стола при возрастании скорости движения поперек стола или поворота схвата.
Итак, если в поле зрения глаза попал край некоторого предмета, то можно предусмотреть движение в первую очередь по0 перек стола, погасив при этом скорости поворота схвата и движения вдоль стола. Как только схват сместится до расположения предмета в середине поля зрения глаза, когда скорость движения поперек стола
5 уменьшится до нуля, можно разрешить поворот схвата, по-прежнему сохраняя погашенной скорость движения вдоль стола. И, например, когда предмет окажется в середине поля зрения и правильно сориентиро0 ванным, т.е. когда и 0, и Е О, скорость движения вдоль стола восстанавливается до значения, заданного в процессе обучения.
Практические согласования движений
5 двигателей осуществляются следующим образом. Предварительно отсоединяют от системы управления двигатели. Затем располагают искомый предмет в поле зрения так, чтобы сигналы управления двигате0 лями смешения поперек стола Е 2 и поворота Е имели большое, например, положительное значение, т.е. при этом двигатели стремились бы сместить схват поперек стола дальше от робота (выдвижение руки)
5 и повернуть схват по или против часовой стрелки. Согласование осуществляют с помощью настройки потенциометров 4 допол- нительного блока 13 постоянного запоминающего устройства. Сначала опре0 деляют тот канал внутренней обратной связи 14, который связан с выходом 11 второго двигателя ( и по которому течет ток (по второму парному каналу ток течь не может, так как отсекается диодом). После этого сме5 щают скользящие контакты потенциометров 4 первой и третьей пар столбцовых шин, соединенные с выявленным каналом внутренней обратной связи, в ту сторону и на столько, чтобы уменьшить сигналы Е и
0 до нуля. После этого указанную процедуру повторяют при расположении искомого предмета с противоположной стороны поля зрения глаза. Таким образом добиваются снижения скоростей движения схвата
5 вдоль стола и поворота при возникшем движении поперек стола.
Затем располагают искомый предмет по центру поля зрения (Е(). но с перекосом в ту или другую сторону и настраивают потенциометр первой пары столбцовых
шин, соединенных с выходом 11 третьего двигателя, так, чтобы уменьшить сигнал Е . Процедуру повторяют при перекосе искомого предмета в обратную сторону. На этом требуемое согласование движений всех трех двигателей закончено.
Указанное согласование можно осуществить в процессе обучения путем изменения обучаемой выборки. Для этого придется увеличить число ситуаций и изменить сами ситуации, дополнив ряд показаний рецепторов bip, D2Pbmp показаниями внутренних
обратных связей: Ьпм, bi2M, Ь21bniM,
bn2M
Составим обучаемую выборку для первого двигателя с учетом согласования. Сохраним неизменными первые три ситуации, приняв в них равными нулю токи всех обратных связей: b 0, и дополним их следующими ситуациями.
Четвертая ситуация: в поле зрения глаза край любого предмета (требуется смещение схвата поперек стола в сторону от
робота). Замеры дадут: Ь41 , b« b4m , и
кроме этого ряд необходимо дополнить показаниями внутренних обратных связей,
ди которых все , кроме b 21 k
cU). Коэффициент k учитывает снижение тока потенциометром 4.
Пятая ситуация: в поле зрения глаза край того же предмета но с противоположной стороны. Замеры дадут: bsi ,
b52Pbsmp, дополнительно к этому все
, кроме (2) 0.
Шестая ситуация: в поле зрения глаза искомый предмет, повернутый на 45° по часовой стрелке. Замеры дадут: beip,
Ьб2 bem , дополнительно к этому все
, кроме (.
Седьмая ситуация: в поле зрения глаза искомый предмет, повернутый на 45° против часовой стрелки. Замеры дадут: tni ,
, дополнительно к этому: b 0,
кроме Ьз2 -k E(3)0.
На этом формирование обучаемой выборки первого двигателя заканчивается. Также можно дополнить и изменить обучаемую выборку третьего двигателя. В остальном процесс обучения сохраняется прежним.
Работает обучаемая система управления cneflvtoiUHM образом,
После завершения обучения система подсоединяется к обьекту управления, например, роботу, и на нее подается напряжение U источника питания 12. Электрический ток идет от одной клеммы источника питания 12, проходит через резисторы рецепторов 2, выходит на строчные шины 5 матрицы 3. далее проходит через потенциометры 4,
0
5
0
5
0
5
0
5
0
5
идет по столбцовым шинам б и 7 и через нагрузочные резисторы 10 возвращается на вторую клемму источника питания 12. В результате на парных столбцовых шинах 6 и 7 возникает разность потенциалов. На эту разность повлияет также ток, идущий с соседних усилителей 9, проходящий по каналам внутренней обратной связи 14, выходящий на строчные шины дополнительного блока 13 и через потенциометры 4 выходящий на ту же пару столбцовых шин 6 и 7. Разность потенциалов пары столбцовых шин усиливается двуполярными усилителями 9 и- подается в виде сигналов управления Е с выходов 11 для управления скоростью двигателя. Сигнал управления Е может быть как положительным, так и отрицательным. Каждый рецептор 2 и каждая внутренняя обратная связь 14 в каждой ситуации выдают на выход 11 свои порции eji сигнала управления. В результате фактический сигнал управления Ef определится как сумма всех
порций:
m2п
Ef - 2 e)l + Е e)k- k 1
Если правильно была составлена обучаемая выборка по всем двигателям, то их действия окажутся целенаправленными и согласованными, т.е. схват с глазом будет перемещаться вдоль стола, притормаживать и быстро смещаться в сторону предмета, попавшего в поле зрения глаза, разворачиваться до совпадения условной оси искомого предмета с условной осью поля зрения и останавливаться в том случае, если в центре поля зрения окажется правильно сориентированный искомый предмет. Посторонние предметы схват будет проходить, не останавливаясь.
На этом описание устройства, обучения и принципа действия предлагаемой обучаемой системы управления закончено. Было продемонстрировано что введение внутренних обратных связей 14 позволяет согласовать действия двигателей обьекта управления, например, робота, между собой, в частности притормаживать движение схвата вдоль стола при возникновении движений поперек стола и поворота.
Наличие блоков задержки 16 в каналах внутренних обратных связей 14 позволяет, во-первых, учесть различную инерционность исполнительных органов (изменение скорости двигателя всегда отстает во времени от изменения сигнала управления), а во- вторых согласовать действия исполнительных органов при неизменной ситуации, воспринимаемой органами чувств. Поясним последнее утверждение
примером. Допустим, робот обслуживает станок-полуавтомат и на время отсутствия заготовок отключают станок полностью. Как только в поле зрения глаза робота появилась требуемая заготовка (только что подвезли заготовки), то обучаемая система управления не меняя положения схвата робота, может сначала подключить для предварительного прогрева электронику, затем включить станок, потом подать СОЖ и только после этого приступить к управлению роботом.
Исходя из сказанного, можно уточнить функциональное назначение блоков обучаемой системы управления. Так постоянное запоминающее устройство 3 после завершения обучения согласует все сигналы управления Е с той ситуацией, которую воспринимают в данный момент органы чувств. Изменение сигналов управления Е возможно лишь в том случае, если изменяется ситуация. Такое согласование-подобно условным рефлексам в живой природе. Поэтому постоянное запоминающее устройство 3 можно назвать блоком условных рефлексов.
Дополнительный блок 13 постоянного запоминающего устройства после завершения обучения согласует сигналы управления Е и, следовательно, действия всех исполнительных органов между собой. Если исполнительные органы окажутся временно отключенными от обучаемой системы управления, то указанное согласование все равно будет осуществлено и будет представлять собой подобие внутреннего мыслительного процесса человеческого мозга. Поэтому дополнительный блок 13 постоянного запоминающего устройства можно назвать мыслительным блоком.
Временная задержка сигналов в каналах обратной связи 14 с помощью блоков задержки 16 позволяет растянуть процесс согласования сигналов Е (мышления) на некоторое время. Без указанной задержки процесс согласования затухал бы практически мгновенно. При решении сложных задач, потребуется многоходовой перебор
ситуацией согласования и, следовательно, необходимость в блоках задержки 16.
Таким образом, введение в обучаемую систему управления дополнительного блока
13 постоянного запоминающего устройства и блока внутренних обратных связей 15 расширяет функциональные возможности системы путем введения взаимовлияния сигналов управления на выходах усилителей.
Положительный эффект от использования изобретения достигается благодаря по- вышениюпроизводительности
оборудования, получаемого за счет повышения скоростей движений его исполнительных органов и большей согласованности этих движений.
Формула изобретения
1. Обучаемая система управления,
включающая технические органы чувств, состоящие из наборов рецепторов очувствления в виде, например, фоторезисторов, постоянное запоминающее устройство в виде матрицы аналоговых резисторных элементов памяти, строчные шины которой совмещены с рецепторами очувствления, а столбцовые шины которой объединены попарно, и блок усилителей, каждый усилитель которого своими входами соединен с отдельной парой столбцовых шин, а выходы усилителей являются выходами системы, отличающаяся тем, что, с целью расширения функциональных возможностей обучаемой системы управления путем
введения взаимовлияния сигналов управления на выходах усилителей, включены дополнительные строчные шины матрицы постоянного запоминающего устройства, соединенные попарно с выходами усилителей с помощью каналов внутренних обратных связей, в каждом канале установлен диод, диоды в каждой паре каналов, соединенной с выходом отдельного усилителя, раз- нонаправлены.
2. Система управления по п. 1, о т л и ч а- ю щ а я с я тем, что в каждом канале внутренней обратной связи установлен блок задержки сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2068575C1 |
| ОБУЧАЕМОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1990 |
|
RU2030780C1 |
| ТЕХНИЧЕСКАЯ НЕРВНАЯ СИСТЕМА | 1997 |
|
RU2128857C1 |
| Датчик перемещения для обучаемой системы управления | 1987 |
|
SU1788469A1 |
| Рецепторный датчик положения обучаемой системы управления | 1985 |
|
SU1352456A1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1994 |
|
RU2069053C1 |
| Обучаемое оптическое устройство управления элементом перемещения | 1988 |
|
SU1647604A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РОДОВ | 2002 |
|
RU2319219C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНОЙ БИОНИЧЕСКОЙ КОНЕЧНОСТЬЮ | 2016 |
|
RU2635632C1 |
Использование: для управления роботами, станками. Сущность изобретения: система содержит технические органы чувств, набор рецепторов очувствления, постоянное запоминающее устройство, матрицу аналоговых резисторных элементов памяти, строчные шины, и столбцовые шины, блок усилителей, нагрузочный резистор, выходы системы, источник питания, дополнительный блок постоянного запоминающего устройства, каналы,блок внутренних обратных связей, блок задержки, диод. 1 з.п ф-лы, 1 ил.
| Рецепторный датчик положения обучаемой системы управления | 1985 |
|
SU1352456A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
