Изобретение относится к автоматическому управлению и может быть использовано в автоматических системах с путевым контролем, например в системах управления металлорежущими станками и промьшленными роботами.
Цель изобретения - повьшение функций управления объектом, повьшение
качества управления и его надежности, ю положения, не имеет отдельного блоНа фиг.1 представлена схема обучаемой системы управления с рецепторным датчиком положения, в котором рецепторы выполнены в виде фотоэлектрических элементов; на фиг.2 - схема обучаемой системы управления с рецепторным датчиком положения, в котором рецепторы выполнены в виде элeктpичfecкиx контактов; на фиг.З - пример схемы обучаемой системы управления по двум координатам.
Рецепторньй датчик положения (фиг.1) содержит подвижную головку 1 с источником 2 света и оптикой 3, не- подвижн то мерную линейку 4 с матрицей ПЗУ и с рецепторами 5 в виде фотоэлектрических элементов, которые совмещены со строчн{ 1ми шинами 6 матрицы ПЗУ. Разрядные щины 7 матрицы
йоединены попарно с элементами 8 срав- Q ления этими исполнительными органа- нения, которые соединены с исполни- ми. Таким образом, результирующий тельными органами 9. На фиг.1 показан сигнал управления каждого исполни
также пульт 10 обучения.
Рецепторный датчик положения (фиг.2) имеет ползун 11, которым снабжена подвижная головка 1. Ползун 11 соединен с источником 12 постоянного тока и связан с передачей 13 винт-гайка, приводимой в действие исполнительным органом 9.
Рецепторы 5 выполнены в виде электрических контактов.
Матрица ПЗУ (фиг.2) содержит аналоговые элементы 14 памяти. Пульт 10 обучения имеет формирователь 15 импульсов записи стирания и переключатель 16, который может быть выполнен в виде кнопок 16, 162,...,16 с
возвратом с регулируемым от усилия нажатия электрическим сопротивлением
Элемент 8 сравнения выполнен в ни де электронного усилителя 17 и резисторов 18.
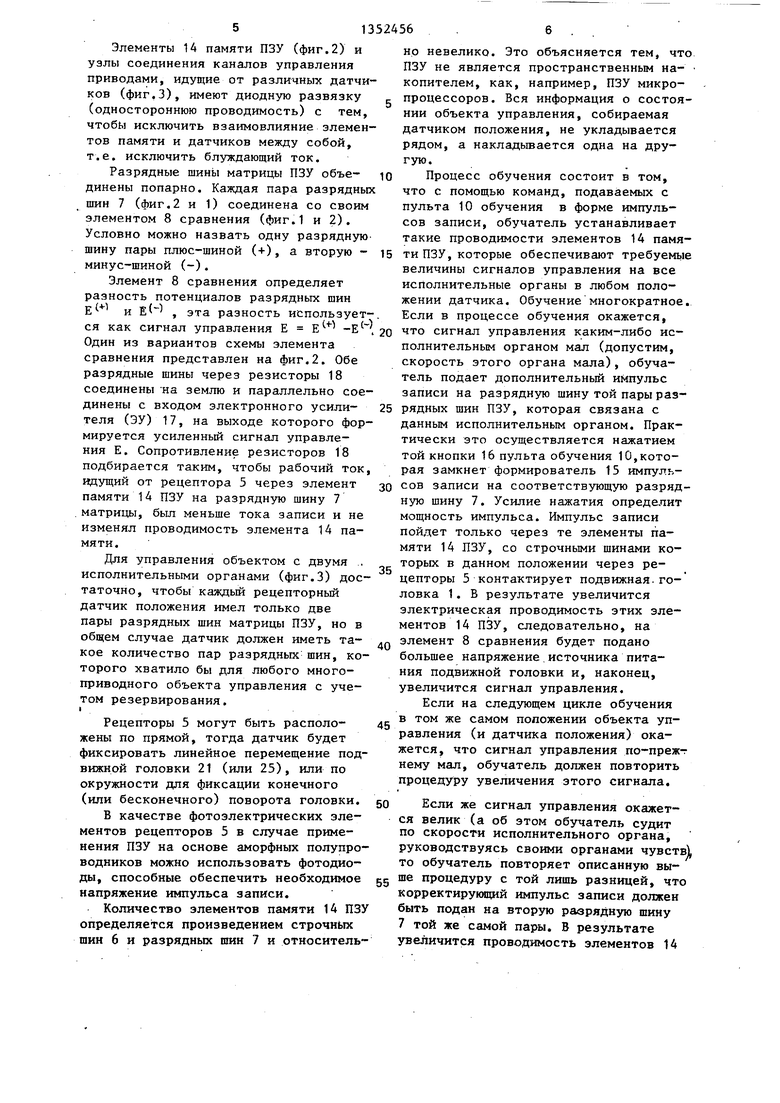
На фиг.З показаны суппорт 19 токарного станка, рецепторный датчик 20 положения продольного перемеще- - ния, подвижная головка 21 датчика продольного перемещения, каналы 22 управления приводами продольного
перемещения, резцедержатель 23, ре- цепторный датчик 24 положения поперечного перемещения, подвижная головка 25 датчика поперечного тгере- мещения, каналы 26 управления приводами поперечного перемещения.
Обучаемая система управления, в которую входит рецепторньй датчик
ка управления. Все датчики системы действуют по принципу рассматриваемого датчика положения и совмещают в себе функции сбора информации
и управления. Процессом обучения устанавливается однозначная связь между информацией о состоянии объекта управления и сигналами управления на все исполнительные органы. Информация поставляется в виде возбуждения рецепторов датчиков (электрического напряжения), а сигналы управления - в виде тока на входе из элементов сравнения.
В общем случае объект управления имеет несколько исполнительных органов, и каждый датчик системы управления имеет столько же.элементов 8 сравнения и выходов с них для управ
тельного органа 9 получается как сумма сигналов, идущих со всех датчиков на данный исполнительный орган.
Пусть Е (фиг.1) есть составляющая общего сигнала управления исполнительного органа 9, идущая с рассматриваемого рецепторного датчика положения. Зависимость сигнала Е от перемещения а подвижной головки 1 в общем случае имеет сложный характер Е f(a), однако если разбить весь диапазон изменения параметра а45
на малые интервалы Ь,,Ь,...,Ь, то можно эту зависимость сделать линейной:
+ ,
(1)
где
4
- весовые коэффициенты.
Требуемая точность зависимости (1) может быть достигнута путем подбора интервалов Ь,,Ь,...,Ь. С уменьшением интервалов точность увеличивается.
Зависимость (1) лежит в основе рецепторного датчика положения обучаемой системы управления и определяет плотность и количество рецепторов 5.
Расстояние между рецепторами в общем случае должно быть равно допуску на позиционирование подвижной головки 1 или меньше его (фиг.1 и 2)
Общее количество рецепторов 5 (фиг,1) определяется как результат деления всей длины перемещения головки 1 на расстояние между рецепторами, оно может быть значительным. Каждый рецептор 5 соединен со строчной шиной 6 матрицы. Следовательно, число строчных шин матрицы может быт также значительным. По этой причине разносить в пространстве рецепт.оры и строчные шины ПЗУ нецелесообразно, в противном случае потребовалось бы огромное количество проводников для их соединения. Этим объясняется то, что ПЗУ совмещено с измерительной частью и датчик положения совмещает функции измерения и управления.
Постоянное запоминающее устройство (фиг.1 и 2) содержит элементы 14 памяти, электрическая проводимость которых может изменяться в широких пределах по командам, подаваемым с пульта 10 обучения, и в зависимости от возбуждения рецепторов 5. Такими элементами памяти могут быть гальваномагнитные устройства, электрохимические элементы, линейные конденса торы, нагруженные на вход полевых транзисторов, и аморфные полупроводники. Пусть в ПЗУ рецепторного датчика положения используются элементы памяти из аморфных полупроводников, например из халькогенидного стекла. Они отличаются простой технологией изготовления и потенциально низкой стоимостью. Между параметрами импульса записи и величиной сопротив- ления элемента памяти из го полупроводника существует непрерывная зависимость. Его недостаток, заключающийся в нестабильности указанной зависимости, применительно к ПЗУ рецепторного датчика положения не имеет практического значения, так как величину импульса записи в процессе обучения обучатель задает такой, чтобы получить требуемый закон движения исполнительного органа. Обратной связью обучателю служат его органы чувств (зрение). Не имеет также существенного значения по указанной причине нелинейность указанной зависимости.
В аморфном состоянии халькогенид- ное стекло является диэлектриком. Если через него пропустить электрический импульс определенной мощности, то ,в стекле возникает электрический пробой, в результате которого аморфное состояние переходит в кристаллическое, электрическая проводимость которого Bbmie, чем у аморфного. В результате пробоя в теле стекла образуется кристаллический токопроводящий шнур, сечение которого зависит от мощности импульса. При повторной пода.чц импульса записи сечение шнура увеличивается и электрическое сопротивление его уменьшается Такое свойство стекла позволяет увеличивать проводимость пробоя многокрано. Средние параметры импульсов записи: напряжение 25 В, ток 5 мА, длительность 10 мс.
Запись на аморфных полупроводниках можно стирать. Для этого подается такой по мощности импульс стирания, при котором кристаллический токопроводящий шнур снова переходит в аморфное состояние и сопротивление резко увеличивается. Импульс стирания имеет следующие параметры: напряжение свьшзе 25 В, ток 100 мА, длительность 5 мкс.
Пульт 10 обучения имеет формирователь импульсов записи и стирания и переключатель для переключения формирователя по желанию обучателя на ту или иную разрядную пшну матрицы ПЗУ.
Переключатель 16 может быть выполнен в виде кнопрк с возвратом с регулируемым от ус11пия электрическим сопротивлением.Если обучаемая систем управления имеет несколько датчиков (фиг.З), то разрядные шины ПЗУ, соответствующие одному и тому же приводу, должны быть соединены между собой и вьшедены на пульт 10 обучения (фиг.З).
Импульс записи продолжительностью 10 мс и тем более импульс стирания н могут повлиять на инерционную систем управления приводами, но если это произойдет, то в каналах управления необходимо установить фильтры в виде конденсаторов для предотвращения этого.
10
51352456
Элементы 14 памяти ПЗУ (фиг.2) и узлы соединения каналов управления приводами, идущие от различных датчиков (фиг.З), имеют диодную развязку (одностороннюю проводимость) с тем, чтобы исключить взаимовлияние элементов памяти и датчиков между собой, т.е. исключить блуждающий ток.
Разрядные шины матрицы ПЗУ объединены попарно. Каждая пара разрядных шин 7 (фиг.2 и 1) соединена со своим элементом 8 сравнения (фиг.1 и 2). Условно можно назвать одну разрядную- шину пары плюс-шиной (+), а вторую - минус-шиной (-).
Элемент 8 сравнения определяет разность потенциалов разрядных шин Е и Е , эта разность используется как сигнал управления Е -Е . Один из вариантов схемы элемента сравнения представлен на фиг.2. Обе разрядные шины через резисторы 18 соединены на землю и параллельно соединены с входом электронного усилителя (ЭУ) 17, на выходе которого формируется усиленный сигнал управления Е, Сопротивление резисторов 18 подбирается таким, чтобы рабочий ток, идущий от рецептора 5 через элемент памяти 14 ПЗУ на разрядную шину 7 матрицы, был меньше тока записи и не изменял проводимость элемента 14 памяти.
Для управления объектом с двумя .
20
30
35
но ПЗ ко
пр ни да ря гу
чт пу со та
15 ти ве ис же Ес чт по ск те за
25 ря да ти то ра со ну мо по мя то це ло эл ме эл бо ни ув
исполнительными органами (фиг.З) достаточно, чтобы каждый рецепторньй датчик положения имел только две пары разрядных шин матрицы ПЗУ, но в общем случае датчик должен иметь такое количество пар разрядных шин, которого хватило бы для любого многоприводного объекта управления с учетом резервирования, t
Рецепторы 5 могут быть расположены по прямой, тогда датчик будет фиксировать линейное перемещение подвижной головки 21 (или 25), или по окружности для фиксации конечного (или бесконечного) поворота головки.
В качестве фотоэлектрических элементов рецепторов 5 в случае применения ПЗУ на основе аморфных полупроводников можно использовать фотодиоды, способные обеспечить необходимое напряжение импульса записи.
Количество элементов памяти 14 ПЗУ определяется произведением строчных шин 6 и разрядных шин 7 и относитель6
6 . .
но невелико. Это объясняется тем, что ПЗУ не является пространственным на- копителем, как, например, ПЗУ микро
0
0
5
0
5
процессоров. Вся информация о состоянии объекта управления, собираемая датчиком положения, не укладывается рядом, а накладывается одна на другую.
Процесс обучения состоит в том, что с помощью команд, подаваемых с пульта 10 обучения в форме импульсов записи, обучатель устанавливает такие проводимости элементов 14 памя5 ти ПЗУ, которые обеспечивают требуемые величины сигналов управления на все исполнительные органы в любом положении датчика. Обучение многократное. Если в процессе обучения окажется, что сигнал управления каким-либо исполнительным органом мал (допустим, скорость этого органа мала), обучатель подает дополнительный импульс записи на разрядную шину той пары раз5 рядных шин ПЗУ, которая связана с данным исполнительньм органом. Практически это осуществляется нажатием той кнопки 16 пульта обучения 10,которая замкнет формирователь 15 импульсов записи на соответствующую разрядную шину 7. Усилие нажатия определит мощность импульса. Импульс записи пойдет только через те элементы памяти 14 ПЗУ, со строчными шинами которых в данном положении через рецепторы 5 контактирует подвижная, головка 1. В результате увеличится электрическая проводимость этих элементов 14 ПЗУ, следовательно, на элемент 8 сравнения будет подано большее напряжение,источника питания подвижной головки и, наконец, увеличится сигнал управления.
Если на следующем цикле обучения в том же самом положении объекта управления (и датчика положения) окажется, что сигнал управления по-преж-г нему мал, обучатель должен повторить процедуру увеличения этого сигнала.
0 Если же сигнал управления окажется велик (а об этом обучатель судит по скорости исполнительного органа, руководствуясь своими органами чувств то обучатель повторяет описанную выg ше процедуру с той лишь разницей, что корректируюш ий импульс записи должен быть подан на вторую разрядную шину 7 той же самой пары. В результате увеличится проводимость элементов 14
ПЗУ этой разрядной шины, увеличится напряжение, подаваемое этой разрядной шиной на элемент сравнения и, наконец, уменьшится сигнал управления.
Обучаемая система управления .является автоматической системой и может использоваться как для регулирования, так и для воспроизведения- повторяющихся циклических движений. Так, например, суппорт 19 токарного станка (фиг.З) должен повторять одни и те же движения при обработке большого количества деталей одной конфигурации. Обученный на изготовлении нескольких первых деталей, суппорт 1 в дальнейшем будет работать в автоматическом режиме.
Процесс обучения сходящийся, т.е. величина последующей корректировки всегда меньше предыдущей (при безошибочном обучении). Ошибка в обучении может быть исправлена на последующих циклах обучения. По желанию обу чателя память датчика положения может быть стерта и обучение начато заново.
Обучение можно считать законченным, если движение исполнительных органов удовлетворяет обучателя с заданной степенью точности. Если погрешность движений больше допустимой, процесс обучения необходимо продолжить.
Рассмотрим процесс обучения и автоматический режим работы рецептор- ного датчика положения на примере суппорта -токарного станка, оснащенного указанными датчиками (фиг.З). Считаем, что память ПЗУ перед началом обучения чиста. Если в ПЗУ что-т было записано ранее и есть необходимость стереть запись, обучатель подсоединяет ко всем разрядным шинам ПЗУ обоих датчиков, т.е. к тем разрядным шинам, которые подсоединены к пульту 10 обучения, формирователь 15 импульсов стирания, параметры которых указаны вьщ1е, С другой стороны должны быть замкнуты на источник электрического тока подвижных головок все строчные шины матриц ПЗУ рецеп- торных датчиков 20 и 24 положения. Это можно осуществить путем принудительного перемещения подвижных головок 21 и 25 по всей дпине датчиков положения или любым другим способом. Мощность импульсов стирания и время J
9 -
о
3524568
их действия таковы, что имеющиеся кристаллические шнуры элементов памяти ПЗУ перейдут в аморфное исходное состояние, характеризируемое большим омическим сопротивлением. После окончания процесса стирания все элементы памяти ПЗУ будут, во- первых, иметь большое электрическое
IQ сопротивление, а во-вторых, эти сопротивления будут выравнены. Поэтому в исходном состоянии напряжения плюс- шин и минус-шин на каждой паре, соз- . даваемые источником электрического
15 тока подвижной головки (фиг.2; на фиг.З этот источник не показан), будут равны и сигналы управления исполг нительными оргайами 9, и 9, , определяемые как разность указанных на20 пряжений, будут равны нулю. Это внешне выразится в том, что исполнительные органы будут бездействовать.
Допустим, что перед обучателем ставится цель обучить токарный ста25 нок обрабатывать определенную деталь с определенной конфигурацией. Для этого необходимо обучить суппорт с двумя исполнительными органами 9|
35
40
и 9 повторять сложные циклические 30 движения с заданной точностью.
Обучатель в каждом положении суппорта 19, характеризуемом положениями подвижных головок 21 и 25, определяет закон движения суппорта 19 (какой исполнительньш орган и с какой скоростью должен работать) и добивается исполнения этого закона движения путем нажатия с требуемьм усилием кнопок 16 на пульте 10 обучения (кнопки на фиг.З не показаны).
Пусть кнопки 16 имеют следующие обозначения: (+) - соединение формирователя 15 импульсов записи с плюс-шинами матриц ПЗУ обоих датчиков, элементы 8 сравнения которых имеют выход на исполнительный орган 9,, 16((-) - то же с минус-шинами;
с плюс-шинами испол- , 16 (-) - то - же с минус-пганами исполнительного органа 9г.
Допустим, необходимо соверщить продольное перемещение суппорта вправо на определенную величину с 55 определенной скоростью. Обучатель нажимает кнопку 16, (+), замыкая тем самым соответствующие плюс-шины на формирователь 15 импульсов записи. Под напряжением импульса записи ока-
16 (+) - то же нительного органа .j
50
9135
жутся все элементы ПЗУ обоих датчиков соответсти тощих плюс-шин, однако пробой возникнет только у тех элементов, строки которых с помощью подвижных головок 21 и 25 через контакты рецепторов 5 соединены с источниками электрического тока. Цепи всех прочих строчных шин разорваны (они ни с чем не соединены), поэтому прочие элементы ПЗУ запись не произведут. По продолжительности импульс записи настолько короток, что не сможет повлиять на систему управления ис
полнительньм органом 9, , фильтрующ то высокие частоты сигнала управления, поэтому исполнительный орган 9 не сработает.
Однако после осуществления записи в соответствующие элементы ПЗУ, выразившейся в увеличении электрической проводимости этих элементов, напряжение источников тока подвижных головок будет подано на плюс-шины обоих датчиков, соответствующие исполнительному органу 9, а напряжения на минус-шинах равны нулю, результирующим напряжением, поданым на исполнительный орган 9, ,, будет сумма напряжений обоих плюс-шин. Исполнительный орган 9) придет в действие, и суппорт 19 начнет перемещаться вправо. Движение будет продолжаться до тех пор, пока будет нажата кнопка 16, потому что в любом новом положении датчиков все время будет повторяться рассмотренный процесс записи Б памяти ПЗУ.
Если необходимо ускорить движение, обучатель должен сильнее нажать кнопку 16, „ При этом увеличится мощность импульса записи, соот ветственно увеличится проводимость элементов ПЗУ, строчные шины которых находятся под напряжением подвижной головки, и увеличится сигнал управления. Как только суппорт 19 переместится на заданную величину, обучатель должен отпустить кнопку 16, Запись прекратится, и исполнительный орган остановится.
Так можно осуществлять любые согласованные движения исполнительных органов 9( н 9.
При повторных циклах обучения могут возникнуть отклонения в заданном законе движения и даже ложные движения. Корректировка и исправление осуществляются тем же способом; нажати
5
0
0
5
0
10 .
ей соответствующих кнопок 16 пульта 10 обучения.
Рассмотрим несколько примеров.
1.Требуемое движение - вправо, действительное движение - влево: необходимо нажать кнопку (+).
2.Требуемое движение - вперед, действительное движение - влево: необходимо сначала нажать кнопку
16, (+). с таким усилием, чтобы
остановить орган 9,, а затем нажать кнопку 16 (+). Можно нажать обе кнопки одновременно.
3. Действительная скорость органа 9, вправо выше, органа 9 назад ниже требуемых: необходимо нажать кнопки 16, (-) и 16 (-) с таким усилием, чтобы достичь желаемых скоростей.
Пульт 10 обучения может работать в следящем режиме, когда выбор кнопок и усилие их нажатия определяются автоматически в зависимости от поло- 5 жения, например, единой рукоятки, управляемой обучателем.
Циклы обучения должны повторяться до тех пор, пока суппорт 19 не научится совершать требуемые циклические движения с заданной точностью, и все это время постоянно будут корректироваться проводимости элементов ПЗУ.
Обучаемая система управления не имеет раздельных режимов обучения и работы: обучение считается завершен- ньм, если обучатель не нажимает на кнопки пульта обучения и не посылает импульсы записи на ПЗУ, в то же время обучатель в любой момент имеет возможность вмешаться в работу системы управления и скорректировать ее.
В обученном состояни в автоматическом режиме суппорт 19 работает следующим образом.
В любом положении суппорта 19 сигналы управления 9, и 9 определяются тремя факторами: положениями подвижных головок датчиков 21 и 25, окончательно установившимися проводинос- тями тех элементов ПЗУ, строчные шины которых контактируют с подвижными головками, и соотношением проводимос- тей элементов плюс- и минус-шин.
Отличительной особенностью рецеп- горного датчика положения обучаемой системы управления является то, что . он совмещает в себе функции измерения и управления.
С использованием рецепторцых датчиков положения отпадает необходимость в логической разработке алгоритма управления, так как этот алгоритм формируется автоматически в процессе обучения. Логическое моделирование процессов управления заменяется обучаемым моделированием.
При выходе из строя отдельных эле- ю ков положения.
ментов ПЗУ, т.е. при нарушениях памяти происходит снижение точности движений, но не возникает полный отказ системы управления. Например, в результате флуктуации аморфного стек ла самопроизвольно изменяется проводимость отдельного элемента 14 памяти ПЗУ. Доля этого элемента в.формировании сигнала управления очень, мала, поэтому нарушения его отразятся на изменении поведения приводов совсем незначительно. Также незначитель
но повлияет на точность потеря отдельного контакта ползуна 11 подвижной головки с рецепторами 5. Сказан- 25 жащий неподвижную мерную линейку с ное хорошо подтверждается выражением (1). Изменение отдельных весовых коэффициентов Cj или возбуждений рецепторов bj отразится на изменении Е незначительно. Следует также иметь в виду, что самопроизвольные изменения проводимостей элементов памяти носят в общем случае нормальный закон распределения, поэтому в среднем эти изменения разделятся поровну на плюс- шины и на минус-шины, а так как результирующий сигнал управления формируется как разность напряжений парных разрядных шин, то этот сигнал управления не должен измениться. В этом заключается повышение надежности процессорной части датчика положения, если сравнивать ее с надежностью процессорной части обычных релейных систем управления и управляющих вычислительных машин.
рецепторами в виде фотоэлектрически элементов, подвижную головку с исто ником света и оптикой, отлича щийся тем, что, с целью выпол 2Q нения функций управления объектом, повьщ1ения качества управления и его надежности, мерная линейка датчика содержит постоянное запоминающее устройство, выполненное в виде матрицы аналоговых элементов памяти, строчные шины которой совмещены с рецепторами, а разрядные шины объединены попарно и являются выходами датчика.,
40
2. Датчик ПОП.1, отличающийся тем, что рецепторы выпол нены в виде электрических контактов а подвижная головка имеет ползун, соединенный с источником постоянног тока и контактирующий с рецепторами
В процессе работы в автоматическом режиме по1;решности в движениях будут накапливаться и могут превысить допустимые отклонения, тогда восстановления .требуемой точности можно достигнуть не ремонтом ПЗУ, а обычным дообучением, В этом состоит еще одно преимущество рецепторных датчи-.
чения.
Требования по качеству изготовления датчиков также снижены, потому что многие исходные отклонения могут быть нейтрализованы в процессе обучения.
Рецепторные датчики положения позволят также повысить .качество автоматического управления.
Формула изобретения
1. Рецепторньй датчик положения обучаемой системы управления, содер5 жащий неподвижную мерную линейку с
рецепторами в виде фотоэлектрических элементов, подвижную головку с источником света и оптикой, отличающийся тем, что, с целью выпол Q нения функций управления объектом, повьщ1ения качества управления и его надежности, мерная линейка датчика содержит постоянное запоминающее устройство, выполненное в виде матрицы аналоговых элементов памяти, строчные шины которой совмещены с рецепторами, а разрядные шины объединены попарно и являются выходами датчика.,
жащий неподвижную мерную линейку с
2. Датчик ПОП.1, отличающийся тем, что рецепторы выполнены в виде электрических контактов, а подвижная головка имеет ползун, соединенный с источником постоянного тока и контактирующий с рецепторами.
(pue.Z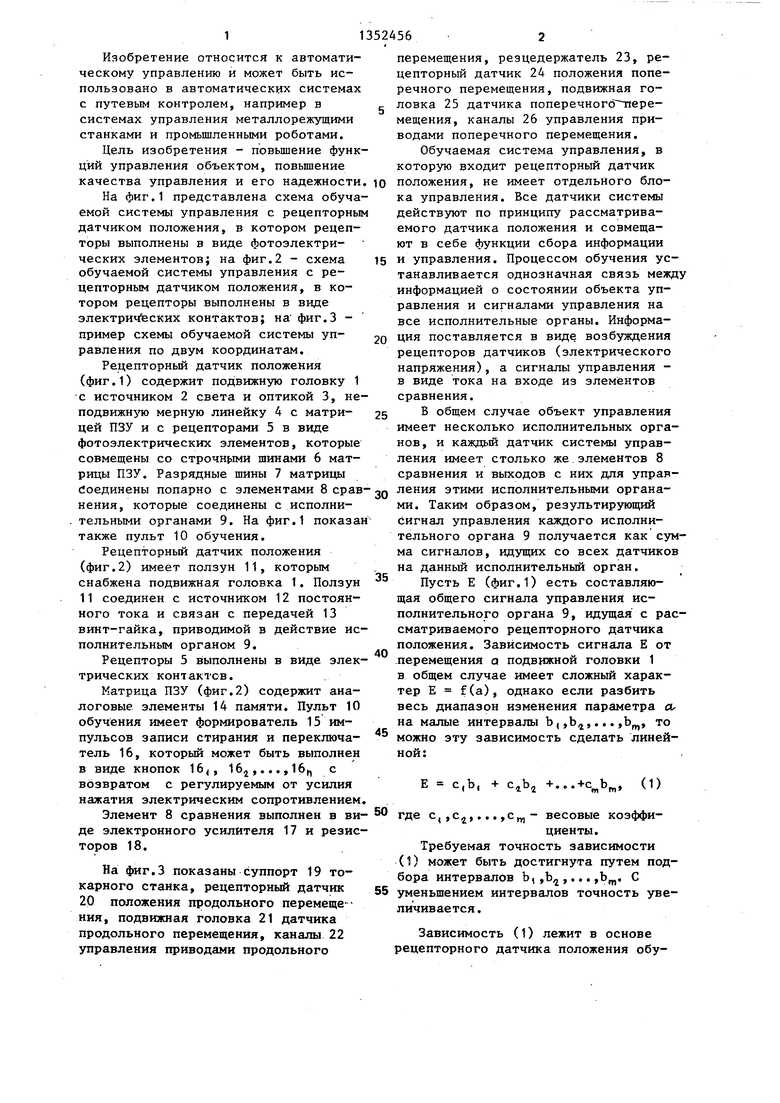




| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещения для обучаемой системы управления | 1987 |
|
SU1788469A1 |
| ТЕХНИЧЕСКАЯ НЕРВНАЯ СИСТЕМА | 1997 |
|
RU2128857C1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2068575C1 |
| ОБУЧАЕМОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1990 |
|
RU2030780C1 |
| Обучаемая система управления | 1990 |
|
SU1824625A1 |
| Устройство для отладки и контроля микропроцессорных систем | 1988 |
|
SU1647568A1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Обучаемое оптическое устройство управления элементом перемещения | 1988 |
|
SU1647604A1 |
| Асооциативная однородная среда | 1978 |
|
SU798803A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
Изобретение относится к области автоматического управления и может быть использовано в автоматических системах с путевым контролем, например в системах управления металлорежущими станками и промышленными роботами. Цель изобретения - выполнение функций управления объектом, повьшение качества управления и его надежности. Рецепторный датчик положения содержит подвижную головку 1, неподвижную мерную линейку 4 с матрицей ПЗУ и с рецепторами 5, которые совмещены со строчными шинами 6 матрицы ПЗУ. Разрядные шины матрицы соединены попарно с элементами сравнения 8, выходы которых подключены к исполнительным органам 9. Рецепторный датчик положения обучаемой системы управления совмещает в себе функции измерения и управления. С использованием рецепторньш датчиков положения отпадает необходимость в логической разработке алгоритма управления, т.к. этот алгоритм формируется автоматически в процессе обучения. 1 з.п. ф-лыв 3 ил. f ее 77 1 г г-1 ю i i. t фив.1
Редактор М.11иткина
Составитель Л.Исправникова
Техред А.КравчукКорректор И.Муска
Заказ 5565/47Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений к открытий 113035j Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Аналоговые запоминающие и адаптивные элементы/ Под ред | |||
| Б.С.Сотского | |||
| М.: Энергия,1973, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Косарев Ю.А., Виноградов С.В | |||
| Электрически изменяемые ПЗУ | |||
| Л.: Энергоатомиздат, Ленинградское отделение, 1985, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Патент США № 4469993, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Заявка ФРГ № 3311118, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
