Изобретение относится к измерительной технике и может быть использовано для измерения статического момента асинхронного двигателя в системах адаптивного управления металлорежущими станками.
Известно устройство для измерения момента электродвигателя, в котором содержится усилитель и апериодическое звено, выход которого соединен с первым входом усилителя, на вторые входы усилителя и апериодического звена подключен датчик частоты вращения, а третий вход апериодического звена подсоединен к устройству для измерения активного момента. Недостатком известного устройства является ограниченная область применения, поскольку оно неработоспособно при использовании асинхронного двигателя в качестве привода главного движения в системах адаптивного управления металлорежущими станками.
Наиболее близким к изобретению по технической сущности является устройство для измерения статического момента электродвигателя, в котором якорь испытуемого двигателя представлен сумматором и интегратором, причем на входы сумматора подключены датчики электромагнитного и статического момента, на первый вход модели якоря, представленный сумматором, подключен датчик тока якоря двигателя постоянного тока, выход сумматора подключен к входу интегратора, выход которого совместно с выходом датчика частоты вращения подключен к сумматору, соединенному через регулятор со вторым входом сумматора модели якоря. Недостатком известного устройства является невысокая точность измерений, а также ограниченная область применения, поскольку оно предназначено лишь для электродвигателя постоянного то-, ка и не может быть использовано для измерения статического момента наиболее широко применяющихся в станкостроении приводов главного движения на асинхронных электродвигателях с короткозамкнутым ротором.
Цель изобретения - повышение эффективности за счет возможности определения статического момента асинхронного двигателя с короткозамкнутым ротором и увеличения точности.
(Л
С
vj
00
ю
00
00
VI
Поставленная цель достигается тем, что в устройство введены трансформатор напряжения, вторичная обмотка которого подключена к входам блока выпрямления и датчика частоты сети, выход блока выпрямления подключен ко входу преобразователя напряжения в частоту, на второй вход пре- образодателя напряжения в частоту подключён ист р-Гк посто янного напряжения, выход сети подключен к первому1 входУ%стр эйства преобразования разности частот, второй вхЬд которого соединен с выходом преобразователя напряжения в частоту, связанного с тахогенератором, выход устройства преобразователя разности частот подключен ко входу вычислителя момента, состоящего из двух последовательно включенных интеграторов с ключами сброса, выход преобразователя напряжения в частоту соединен с ключами сброса интегратора через блок задержки и с ключом передачи информации, который подключен между выходом второго интегратора и входом устройства выборки- хранения, на выходе которого получаем сигнал .пропорциональный полному моменту двигателя. Существенными отличиями предлагаемого устройства является введение новых блоков и взаимосвязей.
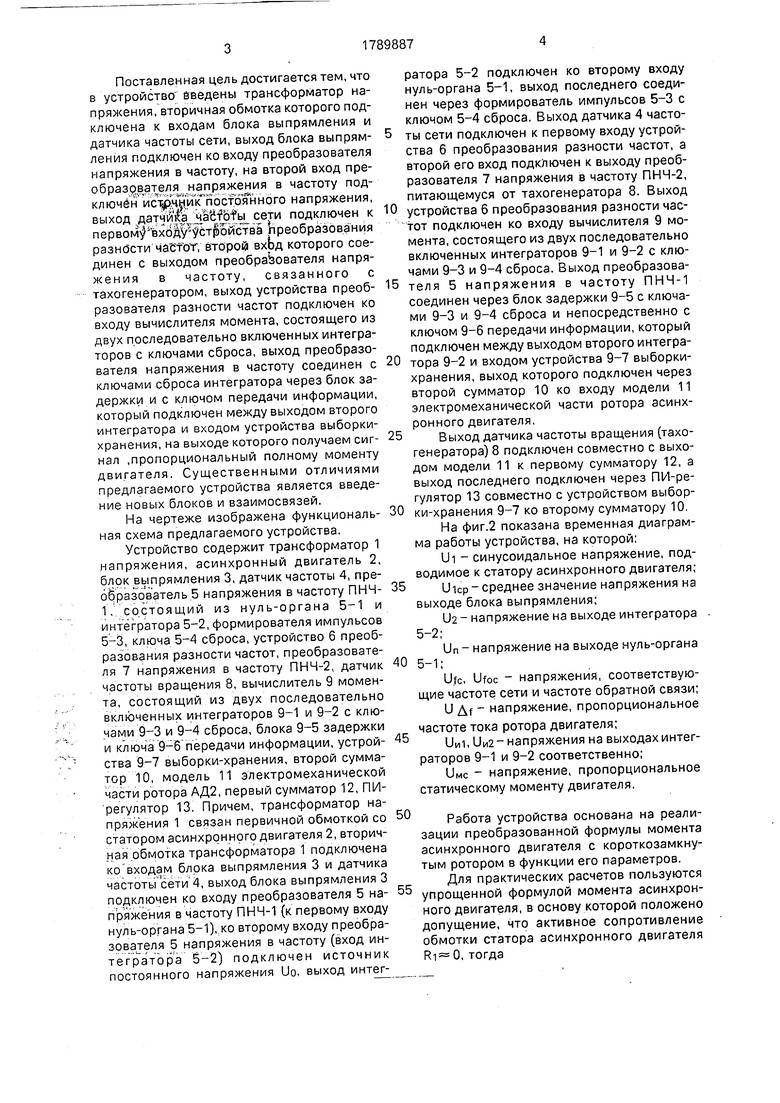
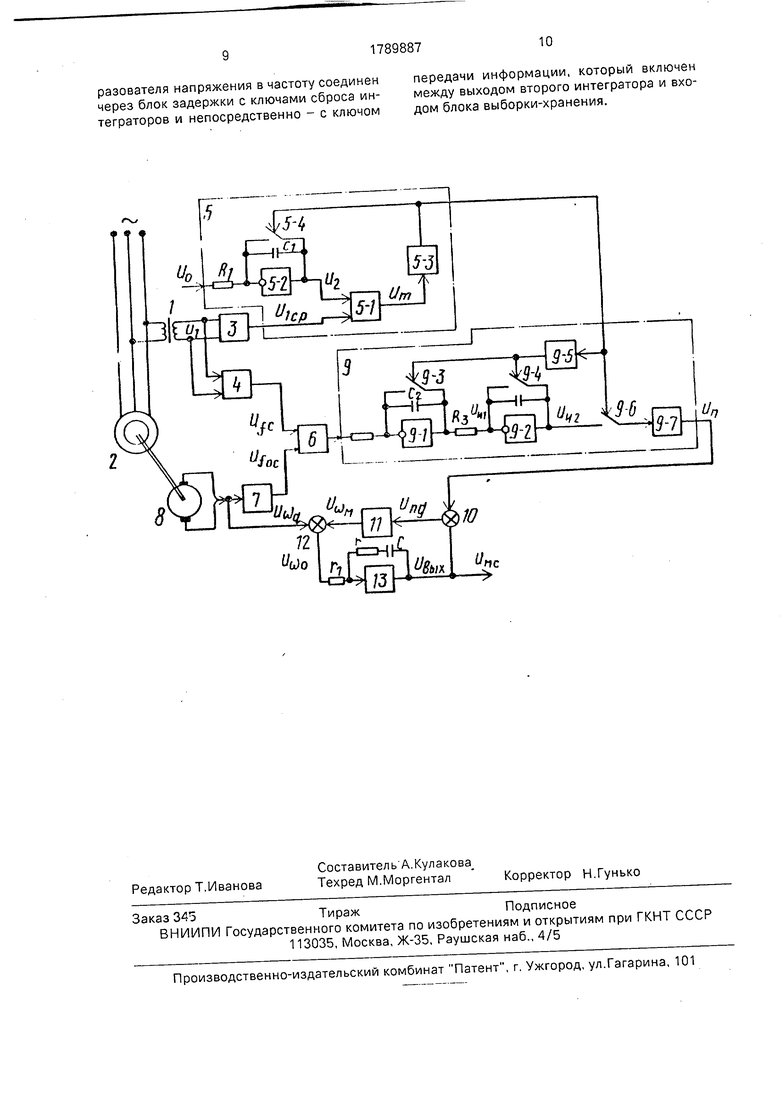
На чертеже изображена функциональная схема предлагаемого устройства,
Устройство содержит трансформатор 1 напряжения, асинхронный двигатель 2, блок выпрямления 3, датчик частоты 4, пре- орразователь5 напряжения в частоту ПНЧ- 1, состоящий из нуль-органа 5-1 и интегратора 5-2, формирователя импульсов 5-3, ключа 5-4 сброса, устройство 6 преобразования разности частот, преобразователя 7 напряжения в частоту ПНЧ-2, датчик частоты вращения 8, вычислитель 9 момента, состоящий из двух последовательно включенных интеграторов 9-1 и 9-2 с ключами 9-3 и 9-4 сброса, блока 9-5 задержки и ключа передачи информации, устройства 9-7 выборки-хранения, второй сумматор 10, модель 11 электромеханической части ротора АД2, первый сумматор 12, ПИ- регулятор 13. Причем, трансформатор напряжения 1 связан первичной обмоткой со статором асинхронного двигателя 2, вторичная обмотка трансформатора 1 подключена ко входам блока выпрямления 3 и датчика частоты сети 4, выход блока выпрямления 3 подключен ко входу преобразователя 5 напряжения в частоту ПНЧ-1 (к первому входу нуль-органа 5-1), ко второму входу преобразователя 5 напряжения в частоту (вход ин- 5-2) подключен источник постоянного напряжения Uo, выход интегратора 5-2 подключен ко второму входу нуль-органа 5-1, выход последнего соединен через формирователь импульсов 5-3 с ключом 5-4 сброса. Выход датчика 4 частоты сети подключен к первому входу устройства 6 преобразования разности частот, а второй его вход подключен к выходу преобразователя 7 напряжения в частоту ПНЧ-2, питающемуся от тахогенератора 8. Выход
устройства 6 преобразования разности частот подключен ко входу вычислителя 9 момента, состоящего из двух последовательно включенных интеграторов 9-1 и 9-2 с ключами 9-3 и 9-4 сброса. Выход преобразователя 5 напряжения в частоту ПНЧ-1 соединен через блок задержки 9-5 с ключами 9-3 и 9-4 сброса и непосредственно с ключом 9-6 передачи информации, который подключен между выходом второго интегратора 9-2 и входом устройства 9-7 выборки- хранения, выход которого подключен через второй сумматор 10 ко входу модели 11 электромеханической части ротора асинхронного двигателя,
Выход датчика частоты вращения (тахогенератора) 8 подключен совместно с выходом модели 11 к первому сумматору 12, а выход последнего подключен через ПИ-ре- гулятор 13 совместно с устройством выборки-хранения 9-7 ко второму сумматору 10.
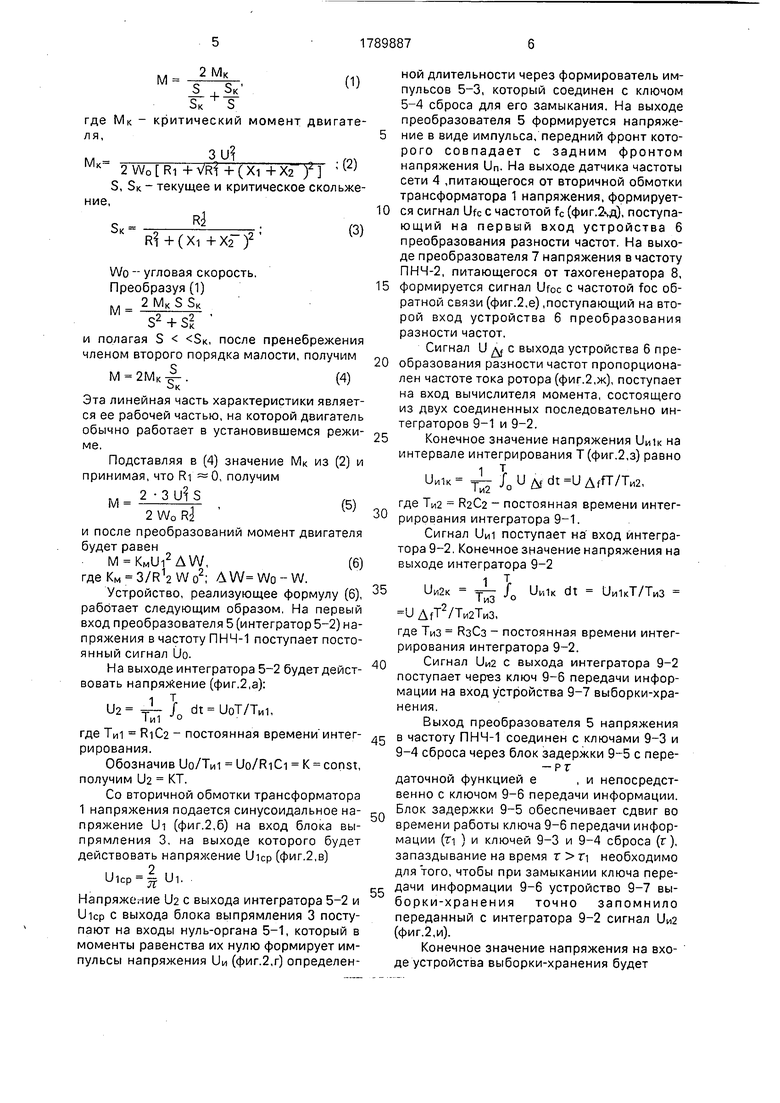
На фиг.2 показана временная диаграмма работы устройства, на которой;
Ui - синусоидальное напряжение, подводимое к статору асинхронного двигателя;
Uicp- среднее значение напряжения на выходе блока выпрямления;
Da - напряжение на выходе интегратора 5-2;
Un - напряжение на выходе нуль-органа
5-1;
UfC, Ufoc - напряжения, соответствующие частоте сети и частоте обратной связи; U Д( - напряжение, пропорциональное
частоте тока ротора двигателя; иИ1, иИ2-напряжения на выходах интеграторов 9-1 и 9-2 соответственно;
Пмс напряжение, пропорциональное статическому моменту двигателя.
Работа устройства основана на реализации преобразованной формулы момента асинхронного двигателя с короткозамкну- тым ротором в функции его параметров.
Для практических расчетов пользуются упрощенной формулой момента асинхронного двигателя, в основу которой положено допущение, что активное сопротивление обмотки статора асинхронного двигателя , тогда
2МК
J , V SK S
(D
где Мк - критический момент двигателя,
3 U2
Мк 2 Wo Ri + VR1 + ( Xi + Х2 )2 ;(2) S, SK - текущее и критическое скольже
R
RH(Xi +X2 }
- 2
(3)
Wo -- угловая скорость. Преобразуя (1) 2MKSSK
М
S2 + SK
М
(4)
и полагая S SK, после пренебрежения членом второго порядка малости, получим S SK
Эта линейная часть характеристики является ее рабочей частью, на которой двигатель обычно работает в установившемся режиме.
Подставляя в (4) значение Мк из (2) и принимая, что Ri 0, получим
u.
2 N0R1
и после преобразований момент двигателя будет равен
M KMUi2AW,(6) гдеКм 3/Р12 Wo2; .
Устройство, реализующее формулу (6), работает следующим образом, На первый вход преобразователя 5 (интегратор 5-2) напряжения в частоту ПНЧ-1 поступает постоянный сигнал Uo.
На выходе интегратора 5-2 будет действовать напряжение (фиг.2,а):
U2 L dt UoT/TMi.
I и1 °
где Ти1 RiC2 - постоянная времени интегрирования.
Обозначив Uo/Ти Uo/RiCi К const, получим U2 КТ.
Со вторичной обмотки трансформатора 1 напряжения подается синусоидальное напряжение 1Н (фиг.2,6) на вход блока выпрямления 3, на выходе которого будет действовать напряжение Uicp (фиг.2,в)
UicP | Ui.
Напряжение U2 с выхода интегратора 5-2 и Uicp с выхода блока выпрямления 3 поступают на входы нуль-органа 5-1, который в моменты равенства их нулю формирует импульсы напряжения 1)ц (фиг.2,г) определенной длительности через формирователь импульсов 5-3, который соединен с ключом 5-4 сброса для его замыкания. На выходе преобразователя 5 формируется напряжение в виде импульса, передний фронт которого совпадает с задним фронтом напряжения Un. На выходе датчика частоты сети 4 .питающегося от вторичной обмотки трансформатора 1 напряжения, формируется сигнал Ufc с частотой fc (фиг.), поступа- ющий на первый вход устройства 6 преобразования разности частот. На выходе преобразователя 7 напряжения в частоту ПНЧ-2, питающегося от тахогенератора 8,
формируется сигнал Ufoc с частотой foe обратной связи (фиг.2,е) .поступающий на второй вход устройства 6 преобразования разности частот.
Сигнал U дЈ с выхода устройства 6 преобразования разности частот пропорционален частоте тока ротора (фиг.2,ж), поступает на вход вычислителя момента, состоящего из двух соединенных последовательно интеграторов 9-1 и 9-2.
Конечное значение напряжения иИ1к на интервале интегрирования Т(фиг.2,з) равно
UKIK /0 U & dt U AffT/Tn2,
где ТИ2 R2C2 - постоянная времени интег- рирования интегратора 9-1.
Сигнал иИ1 поступает на вход интегратора 9-2. Конечное значение напряжения на выходе интегратора 9-2
1 I
иИ2к у /0 иИ1к dt иИ1кТ/ТиЗ
U Д/Г2/Ти2ТиЗ,
где ТиЗ РзСз - постоянная времени интегрирования интегратора 9-2.
Сигнал 11и2 с выхода интегратора 9-2 поступает через ключ 9-6 передачи информации на вход устройства 9-7 выборки-хранения.
Выход преобразователя 5 напряжения
в частоту ПНЧ-1 соединен с ключами 9-3 и 9-4 сброса через блок задержки 9-5 с пере-РГ
даточной функцией е, и непосредственно с ключом 9-6 передачи информации. Блок задержки 9-5 обеспечивает сдвиг во времени работы ключа 9-6 передачи информации (TI ) и ключей 9-3 и 9-4 сброса (г), запаздывание на время необходимо для того, чтобы при замыкании ключа передачи информации 9-6 устройство 9-7 выборки-хранения точно запомнило переданный с интегратора 9-2 сигнал 11И2 (фиг.2,и).
Конечное значение напряжения на входе устройства выборки-хранения будет
иИ2к КИ11 Af-T,
где Ки 1 /ТИ2 Тиз; U Af UfC - Ufoc;
ид UAW
T Klhcp- период выходных импульсов. Устройство выборки-хранения запоминает и хранит значение сигнала Уи2 и на выходе формируется сигнал UM, пропорциональный полному моменту двигателя согласно (6).
Выходной сигнал датчика полного момента двигателя 1)м поступает совместно с сигналом UMC через второй сумматор 10 на вход модели 11 электромеханической части ротора, в виде напряжения, определяющего динамический момент двигателя
Умд UM - UMC.
На выходе модели 11 получаем сигнал UWM, пропорциональный угловой скорости двигателя-
UWM J0 UMfldt.
Для определения сигнала UMC, пропорционального статическому моменту, найдем разность сигналов
U Дw UWM Uwfl.
Сигнал U AW с выхода сумматора 12 поступает на вход ПИ-регулятора 13, имеющего следующую передаточную функцию
Цвых(Р)Тр + 1
UAw(P) TIP тогда
ивых(р) и AW(P) lEJtl , после преобразований
ивых(р) SQ U Aw dt + и Awгде Т, Ti - постоянные времени.
Для приводов, имеющих линейную механическую характеристику, момент будет равен
M(W) - Wi), где ft- коэффициент жесткости.
Преобразуя уравнения привода
M(W) - Mc(W) J JY получим
Тм - + W Wo Me, где Тм - электромеханическая постоянная
времени.
В установившемся режиме
d W dt
0
тогда
Мс /S 0/Vo-Wy), т.е. Мс пропорционален AW.
Таким образом сигнал ивых, формируемый на выходе регулятора 13, пропорционален статическому моменту двигателя
ивых имс }0UAwdt + UAw
Эффективность данного устройства определяется обеспечением возможности измерения статического момента асинхронного двигателя и повышением точности измерения в системах адаптивного управления металлорежущими станками.
Это позволяет рационально нагрузить металлорежущий инструмент и повысить производительность металлообработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости вращения асинхронного двигателя с фазным ротором | 1981 |
|
SU1010564A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2373624C1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1293842A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1478332A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Устройство для фазового управления вентильным преобразователем | 1982 |
|
SU1026281A2 |
| Преобразователь напряжения в частоту | 1981 |
|
SU966892A1 |
Сущность изобретения: устройство содержит 1 датчик частоты вращения (8), 2 сумматора (10, 12), 1 регулятор (13), 1 модель
Формула изобретения Устройство для определения статического момента двигателя, содержащее датчик частоты вращения, выход которого связан с первым входом первого сумматора, к второму входу которого подключен выход модели двигателя, выход первого сумматора соединен через регулятор с первым входом второго сумматора, второй вход которого соединен с выходом блока выборки-хранения, отличающееся тем, что, с целью повышения эффективности за счет возможности определения статического момента асинхронного двигателя с коротко- замкнутым ротором и увеличения точности, в него введены трансформатор напряжения, блок выпрямления, датчик частоты сети, два преобразователя напряжения в частоту, блок преобразования разности частот, блок вычисления момента, состоящий
из двух последовательно соединенных интеграторов с ключами сброса, блока задержки, ключа передачи информации и блока выборки-хранения, а также источник постоянного напряжения, при этом вторичная обмотка трансформатора напряжения подключена к входам блока выпрямления и датчика частоты сети, выход блока выпрямления подключен к одному входу первого преобразователя напряжения в частоту, к другому входу которого подключен источник постоянного напряжения, выход датчика частоты сети соединен с первым входом блока преобразования разности частот, второй вход которого соединен с выходом второго преобразователя напряжения в частоту, связанного с датчиком частоты вращения, выход блока преобразования разности частот подключен к входу блока вычисления момента, выход первого преобразователя напряжения в частоту соединенпередачи информации, который включен
через блок задержки с ключами сброса ин-между выходом второго интегратора и вхотеграторов и непосредственно - с ключомдом блока выборки-хранения.
| Способ измерения моментных харак-ТЕРиСТиК элЕКТРОдВигАТЕля | 1979 |
|
SU838446A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Газовая горелка | 1981 |
|
SU964347A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
