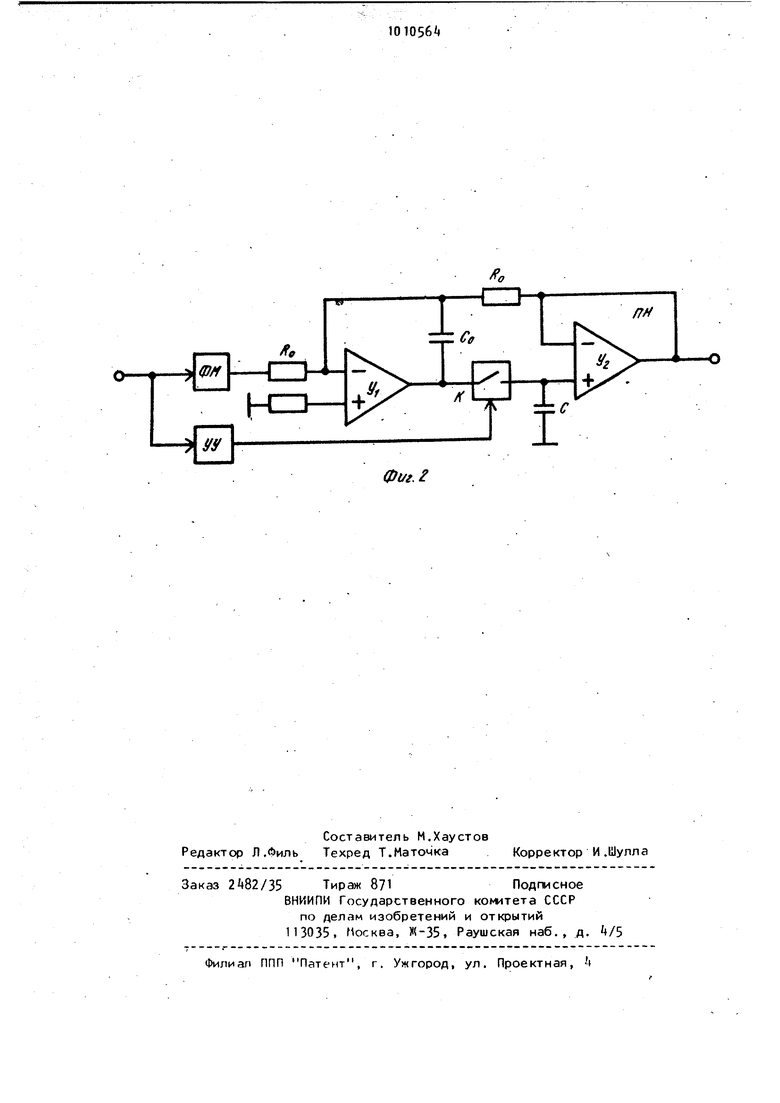
Изобретение относится к средства .измерения и регулирования скорости И может быть использовано для измер ния скорости в системах асинхроннрвентильного каскада. Известно устройство для измерени скольжения асинхронного двигателя, содержащее датчик напряжения ротора, датчик тока ротора и сумматор, первый вход которого подсоединен к выходу датчика напряжения ротора, второй - к выходу датчика тока рото ра, на остальные входы сумматора по даются сигналы, пропорциональные от . дельным составляющим падения напряжения s роторной цепи tl. о Недостатком указанного устройств является значительная погрешность в измерении скольжения двигателя, так как не учитывается изменение на пряжения статора и не обеспечиваетс выделение постоянной составляющей выпрямленного напряжения ротора в п ном диапазоне из менения его частоты.. Известно также устройство, которое содержит асинхронно-вентильный каскадj датчик напряжения ротора, датчик напряжения статора, выход ко торого соединен с первым входом пер вого сумматора, и датчик тока ротора, .включенный в цепь ротора t JИзвестное устройство также имеет значительную погрешность измерения скорости асинхронного двигателя, особенно при работе двигателя на скорости, близкой к синхронной, так как в этом случае RC-фильтр не обеспечивает выделения постоянной соетавляющей выпрямленного напряжения с требуемой точностью, и сигнал, пропорциональный скольжению, приобретает колебательный характер. Увеличение постоянной времени RC-(фильтра с целью уменьшения колебаний сигнала, пропорционального скольжению, приводит к значительному увеличению инерционности устройства. Кроме то го наличие магнитного усилителя не обеспечивает пропорциональности между напряжением ротора и скольжением. Цель изобретения - повышение точности измерения скорости вращения и быстродействия устройства. Для достижения указанной цели в устройстр.с, содержащее асинхронновентилы-ь- каскад, датчик напряжения ротора, датчик напряжения статфа, выход которого соединен с первым входом-первого сумматора, и датчик тока ротора, включенный в цепь ротора, введены преобразователь среднеквадратичных значений, ((ункциональный преобразователь, блок умножения и второй сумматор, первый вход кото рого соединен с выходом датчика тока ротора, с входом функционального преобразователя и первым входом блока умножения, второй вход которого подключен к второму входу первого сумматора и к выходу второго сумматора, а выход - к четвертому входу второго сумматора, третий вход которого соединен с выходом функционального преобразователя, при этом выход датчика напряжения ротора через преобразователь среднеквадратичных значений подключен к второму входу второго сумматора. На фиг. 1 изображена функциональная схема устройства, на фиг. 2 функциональная схема преобразователя среднеквадратичных значений (один из возможных вариантов его схемног о решения ) . Устройство для измерения скорости вращения .асинхронного двигателя с фазным ротором 1, выпрямителем 2 и : инвертором 3 содержит датчик напряжения ротора, датчик 5 напряжения статора и датчик 6 тока ротора. Выход датчика Л напряжения ротора подсоединен к входу преобразователя 7 среднеквадратичных значений, выход которого подсоединен к второму входу второго сумматора 8, первый вход которого подсоединен к выходу датчика 6 тока ротора, четвертый вход сумматора 8 подсоединен к выходу функционального преобразователя 9 а третий - к выходу блока 10 умножения. Выход датчика 6 тока ротора подсоединен к входу функционального преобразователя 9 и к первому входу блока 10 умножения, на второй вход которого подается си|- нал, пропорциональный скольжению асинхронного двигателя, с выхода сумматора 8, который в свою очередь подсоединен к второму входу первого сумматора 11, а первый вход его подсоединен к выходу датчика 5 напряжения статора. Асинхронный двигатель 1 с выпрямителем 2, инвертором 3, дросселем 12 и шунтом 13 образуют асинхронновентильный каскад . Устройство работает следующим об разом. Измерение сюрости вращения асинх ронного двигателя выполняется в соответствии с зависимостью. И(1-5) При сравнении сигнала, пропорционального скольжению двигателя, с по стоянной величиной (эталонное напряжение) выделяется сигнал, пропорциональный скорости вращения двигателя. Для асинхронно-вентильного каскада выпрямленная ЭДС ротора, пропорциональная скольжению, Ьпределяется из выражений .2Cr.)(), -индуктивное сопротивление фазы двигателя, приведенное к обмотке ротора, Ул, - выпрямленное напряжение ротора, -активное сопротивление фазы ротора{ -активное сопротивление фазь статора, приведенное к обмотке ротора, -выпрямленный ток; -скольжение асинхронного дви гат еля , - УГОЛ коммутации. Зависимость эквивалентного активн го сопротивления асинхронного двигателя, приведенного к роторной цепиR(, от S и 1 объясняется изменением инду тивного сопротивления в контуре коммутации роторных вентилей при различных скольжениях и появлени ем угла опережения включения роторны вентилей по сравнению с естественным Это возникает вследствие уменьшения анодного напряжения на вентиле, выходящем из работы. Снижение анодного напряжения обусловлено падением напряжения на активном сопротивлении фазы двигателя. Активное сопротивлёже фазы статора г незначительно за висит от влияния коммутации. Принимая это допущение, выражение для ЭДС ротора принимает следующий вид: (2г; )50даг,-Лз2гД Выделение сигнала, пропорционального скольжению асинхронного двигателя, т.е. ЭДС ротора , осущест вляется суммированием сигналов, пропорциональных выпрямленному напря- . жению ротора U и отдельным составляющим падений напряжения в роторной цепи согласно выражению (О. Функциональный преобразователь 9 реализует зависимость () а блок 10 умножения служит для выде-ления сигнала, .пропорционального произведению выпрямленного тока на скольжение S . Коэффициент усиления сумматора по каждому входу вычисляется согласно выражению (1). При подключении асинхронного двигателя 1 к сети напряжение ротора измеряется датчиком k напряжения ротора и подается на преобразователь 7 среднеквадратичных значений, который обеспечивает эффективное выделение постоянной составляющей выпрямленного напряжения ротора в полном диапазоне изменения его частоты. С выхода преобразователя 7 среднеквадратичных значений сигнал, пропорциональный выпрямленного .напряжению ротора Шр поступает на второй вход второго сумматора 8. На первый вход второго сумматора 8 поступает сигнал, пропорциональный -выпрямленному трку у . На третий вход второго сумматора 8 поступает сигнале выхода блока 10 умножения ,-пропорциональный произведению IJS. На четвертый вход второго сумматора 8 поступает сигнал, пропорциональный произведению -У. taким образом, на выходе второго сумматора 8 выделяется сигнал, пропорциональный ЭДС ротора, а соответственно, и скольжению двигателя U5--Kt3p-- iS, где К - коэффициент пропорциональности . Этот сигнал подается на второй вход первого сумматора 11. Сигнал, пропорциональный напряжению статора, одновременно яаляю1цийся эталонным напряжением, измеряется датчиком 5 напряжения статора и подается на первый вход первого сумматора 11. Первый сумматор 11 вычисляет разность сигналов, которые подаются на его входы. На выходе этого блока выделяется сигнал, пропорциональный скорости вращения асинхронного дви гателя yi Uc-U5- KVli-Kyi %-kviiH-5)--kv, Кроме того, первый сумматор 11 учитывает изменение ЭДС ротора, св занное с колебаниями напряжения пи тающей сети, так как где Кд - коэффициент трансформации асинхронного двигателя. Преобразователь 7 среднеквадрати ных значений содержит формировател .модуля ФМ, управляющее устройство УУ, ключ К, два операционных усилителя У и У- и конструктивные элементы. Средне вы прямлен мое значение напряжения ротора получается интегрированием выпрямленного сигнала /Uft (t)/ за время иТ, кратное периоду Т, и делится на цТ. Выходное на пряжение идеального интегратора W- llUpC) г RC - постоянная времени инте рирования . Преобразователь среднеквадратичных значений обеспечивает кратность постоянной времени rj,RC периоду Т, т.е. . При этом отношение n/m поддерживается постоянным для любых значений Т. Выпрямленное напряжение ротора с выхода формирователя модуля ФМ подается на вход интегрирующего фильтра с синхронным временным квантованием сигнала, построенного по замкнутой схеме. Фильтр содержит интегратор, собранный на усилителе У( , и устройство выборки-хранения (ключ К, запоминающий, конденсатор С и ровторитель напряжения, собранный на усилителе YI). В начале каждого периода /(при прохождении входного сигнала через нулевой уровень/, ключ К закыкается и остается в замкнутом состоянии в течение короткого интервала .време-ни,г«Т, достаточного для заряда конденсатора С. Ключ К коммутируется управляющим устройством УУ . При 1, где VP - коэффициент передач ° устройст ва выборки-хранения , быстродействие фильтра максимально и составляет один период Т во всем диапазоне измерения Up(t) . Это обеспечивает повышение точности и быстродействия устройства.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Устройство для регулирования асинхронного двигателя | 1983 |
|
SU1202006A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Устройство для измерения вращающего момента асинхронного электродвигателя | 1977 |
|
SU750298A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2380821C2 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ, содержащее асинхронно-вентильный каскад, датчик напряжения ротора, датчик напряжения статора, выход которого соединен с первым входом первого сумматора, и датчик тока ротора, включенный в цепь ротора, отли чающееся тем, что, с целью повышения точности измерения и быстродействия, в него введены преобразователь qaeflHCквадратичных значений, функциональный преобразователь, блок умножения и второй сумматор, первый вход которого соединен с выходом датчика тока ротора, с входом функционального преобразователя и входом блока умножения, второй вход которого подключен к второму входу первого сумматора и к выходу второго сумматора, а выход - к четвертому входу-второго сумматора, третий вход которого :соединен с выходом функционального преобразователя, при этом выход-датчика напряжения 0отора черёй преобразователь среднеквадратичных значений подключен к второму входу второго сумматора. О :л 05 4ib