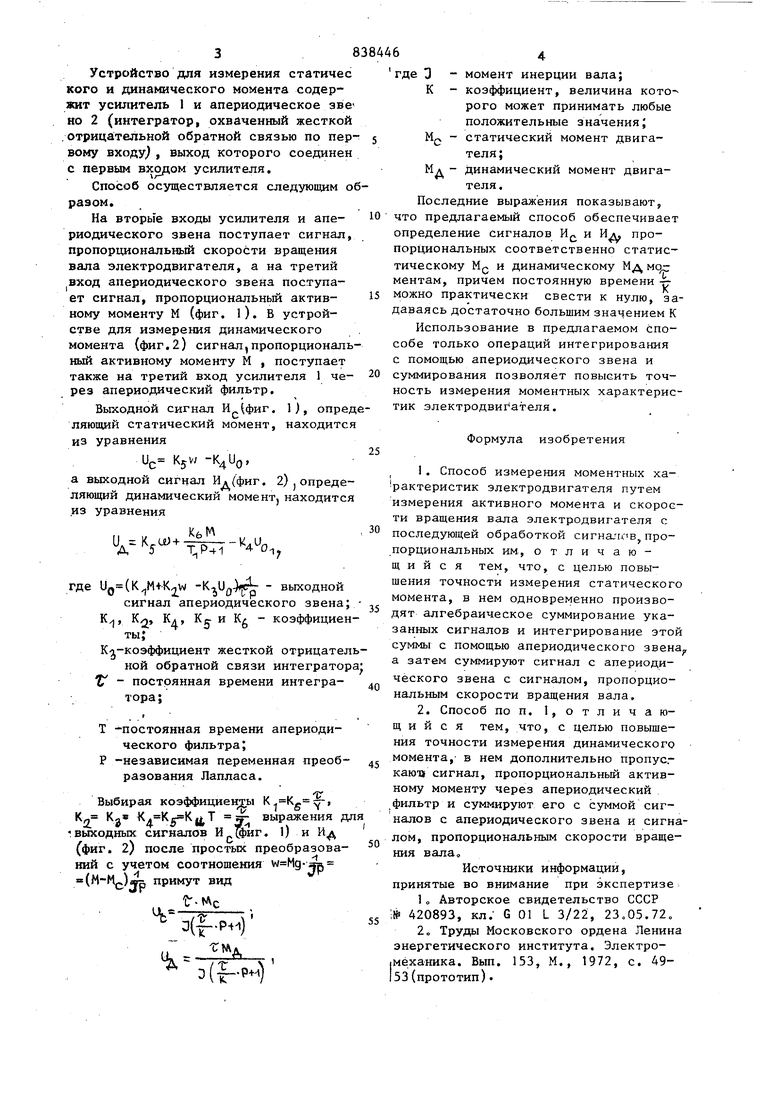
Изобретение относится-к измеритель ной технике и может быть использовано для измерения статического и динами-, ческого момента двигателя постоянного тока. Известен способ измерения моментных характеристик электродвигателя, в котором динамический момент определяют путем дифференцирования сигнала, пропорционального скорости вращения вала, а статический - как разность сигналов, пропорциональных активному моменту и динамическому 1J. Наиболее близким по технической сущности и достигаемому результату к изобретению является способ измерения моментных характеристик электродвигателя путем измерения активного момента и скорости вращения вала электродвигателя с последующей обработкой сигналов, пропорциональных им 2. Недостатком известных способов является низкая точность измерения. Цель изобретения - повышение точности измерения статического и динамического момента. Указанная цель достигается за счет того, что в нем одновременно производят алгебраическое суммирование указанных сигналов и интегрирование этой суммы с помощью апериодического звена, а затем суммируют сигнал с апериодического звена с сигналом, пропорциональным скорости вращения вала, а также за счет того, что в нем дополнительно пропускают сигнал, пропорциональный активному моменту через апериодический фильтр и суммируют его с суммой сигналов с апериодического звена и сигналом, пропорциональным скорости вращения вала. . На фиг. 1 представлена схема устройства для измерения статического момента, фиг. 2 - то же,, для измерения динамического момента электродвигателя. Устройство для измерения статиче кого и динамического момента содержит усилитель 1 и апериодическое эв но 2 (интегратор, охваченный жестко .отрицательной обратной связью по пе вому входу, выход которого соедине с первым входом усилителя, Способ осуществляется следующим разом. На вторые входы усилителя и апериодического звена поступает сигнал пропорциональный скорости вращения вала электродвигателя, а на третий вход апериодического звена поступает сигнал, пропорциональный активному моменту М (фиг. l). В устройстве для измерения динамического момента (фиг.2) сигнал,пропорционал ный активному моменту М , поступает также на третий вход усилителя 1 че рез апериодический фильтр. Выходной сигнал . 1), опре ляющий статический момент, находитс из уравнения Uc Kjw -K4Uo. а выходной сигнал Ид (фиг. 2)jопреде ляющий динамический момент, находитс из уравнения U. K,cjJ+ , где Ug( l -jUg-) - выходной сигнал апериодического звена К, Кл, Кс и К, - коэффицие . Ко-коэффициент жесткой отрицате ной обратной связи интеграто - постоянная времени интегратора ; Т -постоянная времени апериодического фильтра; Р -независимая переменная преоб разования Лапласа. Выбирая коэффициенты , (4 fвыражения«выходных сигналов Е(фиг. 1) и Ид (фиг. 2) после простых преобразова ний с учетом соотношения w Mg-3i5 (M-Mj,) примут вид -7 a(f.p..) 64 где D К момент инерции вала; коэффициент, величина кото рого может принимать любые положительные значения; MQ - статический момент двигателя;Мд - Динамический момент двигателя. Последние выражения показывают, что предлагаемый способ обеспечивает определение сигналов и Ид, пропорциональных соответственно статистическому MQ и динамическому Мд MCJC ментам, причем постоянную времени -рможно практически свести к нулю, задаваясь достаточно большим значением К Использование в предлагаемом способе только операций интегрирования с помощью апериодического звена и суммирования позволяет повысить точность измерения моментных характеристик электродвигателя. Формула изобретения , 1. Способ измерения моментных характеристик электродвигателя путем измерения активного момента и скорости вращения вала электродвигателя с последующей обработкой сигналсв пропорциональных им, отличающийся тем, что, с целью повышения точности измерения статического момента, в нем одновременно произво алгебраическое суммирование указанных сигналов и интегрирование этой суммы с помощью апериодического звена;, а затем суммируют сигнал с апериодического звена с сигналом, пропорциональным скорости вращения вала, 2. Способ по п. 1,отличающ и и с я тем, что, с целью повыщения точности измерения динамического момента, в нем дополнительно пропусг кают} сигнал, пропорциональный активному моменту через апериодический фильтр и суммируют его с суммой сигналов с апериодического звена и сигналом, пропорциональным скорости вращения вала. Источники информации, принятые во внимание при экспертизе 1 о Авторское свидетельство СССР ;№ 420893, КЛ. G 01 L 3/22, 23.05.72„ 2„ Труды Московского ордена Ленина энергетического института. Электромеханика. Вып. 153, М., 1972, с. 4953(прототип).
G
t
НИ
М
М,
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения статического момента электродвигателя | 1979 |
|
SU964491A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Устройство для измерения нагрузочного момента электропривода | 1978 |
|
SU697846A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1579770A1 |
fpu.i
