Известны электропневматические преобразователи, содержащие последовательно соединенные электромеханический и мехаиопиевматический узлы и усилитель мощности.
Предлагаемый электронневматический преобразователь содержит пневматический интегратор, вход которого соединен с выходом механопкевматического узла, а выход - с усилителем мощиости и следящим блоком, а также устройство фиксации выходного давления, состоящее из следящего блока, шток которого соединен с пружинными заслонками, ограничителей верхнего и нижнего значений выходного давления; шток фиксируется пневмомеханическим тормозом, входной канал которого соединен с соленоидным клапаном, управляемым от переключателя режимов работы.
Преобразователь позволяет преобразовывать входной электрический сигнал в непрерывный П1{евматический сигнал, изменяющийся в направлении, определяемом знаком, и со скоростью, определяемой величиной входного электрического сигнала.
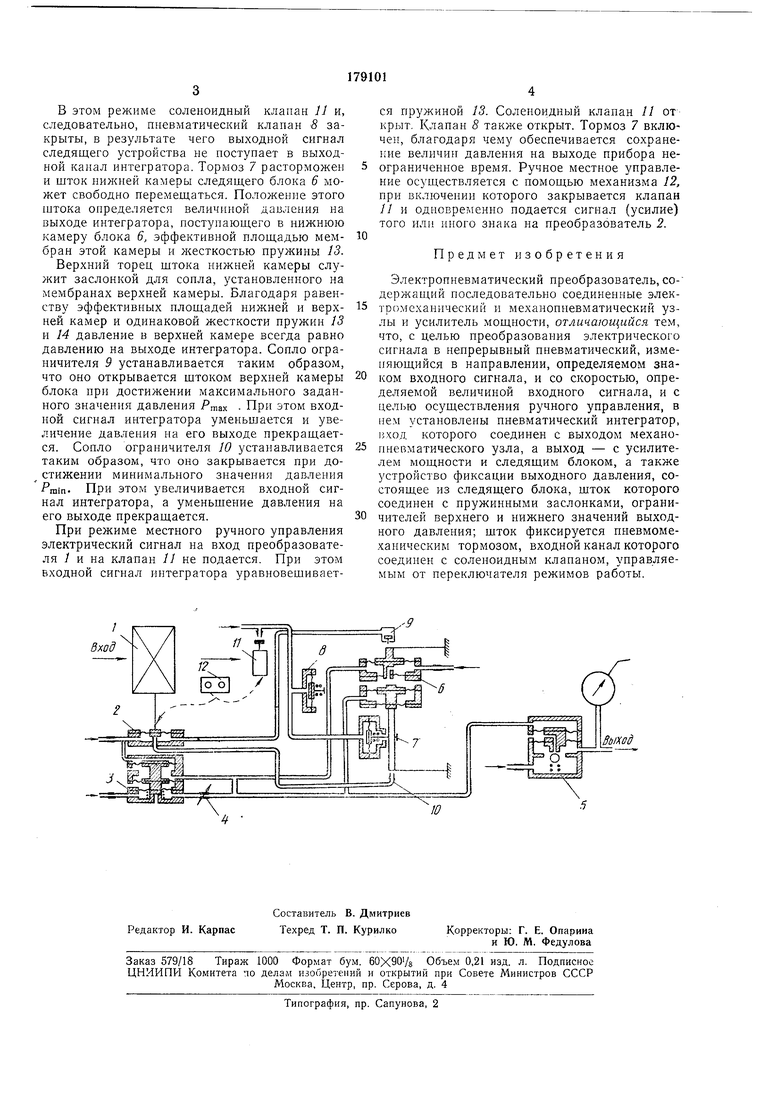
На чертеже изображена схема электропневматического преобразователя.
образователь 2 иреобразует это усилие в пропорциональное давление воздуха.
Пневматический интегратор состоит из сумматора 3, переменного дросселя 4, с помощью которого производится настройка постоянной времени интегратора. В качестве пневмоемкости используется объем соединительных линий и полол ительной камеры сумматора 3.
В преобразователь входят выходной усилитель мощности 5 и устройство фиксации, состоящее из следящего блока 6, пневмомеханнческого тормоза 7 и пневмоклапана 8. В этом же устройстве предусмотрены ограничители 9 и 10 верхнего и нижнего значений выходного давления.
В преобразователе также пмеется соленоидный клапан //, предназначенный для осуществления дистанционного управления; механизм
2 для местного ручного управления.
В режиме автоматического управления преобразователь работает следующим образом. Входной электрический сигнал преобразуется устройствами / н 2 в пропорциональный пневмагический сигнал, поступающий во входную камеру пневматического интегратора. Выходной сигнал интегратора, скорость изменения которого пропорциональна величине входного электрического сигнала, усиливается усилитеВ этом режиме соленоидный клапан 11 и, следовательно, пневматический клапан 8 закрыты, в результате чего выходной сигнал следящего устройства не поступает в выходной канал интегратора. Тормоз 7 расторможен и шток камеры следящего блока 6 может свободно перемещаться. Положение этого штока определяется величиной давления на выходе интегратора, поступающего в нижнюю камеру блока 6, эффективной площадью мембран этой камеры и лсесткостью пружины 13.
Верхний торец штока нижней камеры служит заслонкой для сопла, установленного на мембранах верхней камеры. Благодаря равенству эффективных площадей нижней и верхней камер и одинаковой жесткости пружин 13 и 14 давление в верхней камере всегда равно давлению на выходе интегратора. Сопло ограничителя 9 устанавливается таким образом, что оно открывается штоком верхней камеры блока при достижении максимального заданного значения давления Яшах - При этом входной сигнал интегратора уменьшается и увеличение давления на его выходе прекращается. Сопло ограничителя 10 устанавливается таким образом, что оно закрывается при достижении минимального значения давления rain. При этом увеличивается входной сигнал интегратора, а уменьшение давления на его выходе прекращается.
При режиме местного ручного управления электрический сигнал на вход преобразователя / и на клапан // не подается. При этом входной сигнал интегратора уравновешивается пружиной 13. Соленоидный клапан 11 от крыт. Клапан 8 также открыт. Тормоз 7 включен, благодаря чему обеспечивается сохранение величин давления на выходе прибора неограниченное время. Ручное местное управление осуществляется с помощью механизма 12, при включеиии которого закрывается клапан // и одновременно подается сигнал (усилие) того или иного знака на преобразователь 2.
Предмет изобретения
Электропневматический преобразователь, содержандий последовательно соединенные электромеханический и механопневматический узлы и усилитель мощности, отличающийся тем, что, с целью преобразования электрического сигнала в непрерывный пневматический, изменяющийся в направлении, определяемом знаком входного сигнала, и со скоростью, определяемой величиной входного сигнала, и с целью осуществления ручного управления, в нем установлены пневматический интегратор, вход которого соединен с выходом механопневматического узла, а выход - с усилителем мощности и следящим блоком, а также устройство фиксации выходного давления, состоящее из следящего блока, шток которого соединен с пружинными заслонками, ограничителей верхнего и нижнего значений выходного давления; шток фиксируется пневмомеханическим тормозом, входной канал которого соединен с соленоидным клапаном, управляемым от переключателя режимов работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352974C1 |
| Преобразователь частоты импульсов в аналоговый пневматический сигнал | 1982 |
|
SU1057961A1 |
| ПРОПОРЦИОНАЛЬНЫЙ МОДУЛЯТОР ЭЛЕКТРОННО-ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2008 |
|
RU2385242C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПЕРЕКЛЮЧАЮЩИЙ КЛАПАН | 2015 |
|
RU2686649C2 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ДЕТАЛИ | 1971 |
|
SU316929A1 |
| СПОСОБ ЭЛЕКТРО-ПНЕВМО ПРЕОБРАЗОВАНИЯ | 2014 |
|
RU2568525C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1965 |
|
SU170777A1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2574649C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПОЗИЦИОНЕР | 1969 |
|
SU233998A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1990 |
|
RU2005943C1 |
