Предложенный позиционер предназначен для использова«ия в качестве выходного пневматического устройства управляемого электрическим сигналом постояниого тока.
Электроаневматические позиционеры извесгны, ,и существующие конструкции их устроены по принципу силовой ко.мпенсации. Входной сигнал, поступающий от регулятора или дистанциоциого задатчика, преобразуется в усилие посредством магнитоэлектрического иреобразователя, состоящего из постоянного магнита и катущки. Это усилие складывается с усилием от пружины обратной связи, пропорциональным перемещению выходного звена исполнительного механизма. Суммарное усилие воздействует на пневматическое золотниковое устройство, осуществляющее впуск сжатого воздуха в рабочую полость исполнителького механизма или выпуск воздуха в атмосфеоу, т. е. перемещение выходного звена до такого положения, при котором усилие от магнитоэлектрического преобразователя равно усилию от пружины обратной связи. Указанные приборы из-за малой величины усилия, которое может быть реализовано От тока ома (максимальная вел;ичина усилия составляет 100 г), обладает следующими недостатками: сложностью изготовления механических деталей приборов, трудностью настройки, обслуживания ,и ремонта и большой чувствительностью к вибрации.
Предложенный электропневматический позиционер содержит усилитель переменного тока, соленоидные клапаны, исполнительный механизм и датчик обратной связи на переменном токе и отличается тем, что для улучшения эксплуатационных характеристик он содержит Преобразователь постоянного тока в переменный, выход которого соединен со входол усилителя, с последним также соединен выход датчика обратной связи, а выход усилителя соединен с соленоидными клапанами, выходы которых соединены с исполнительным механизмом, который связан с датчиком обратной связи.
В предложенном устройстве используется компенсация напряжений переменного тока, что позволяет улучшить точность работы позиционера и повысить надежность его.
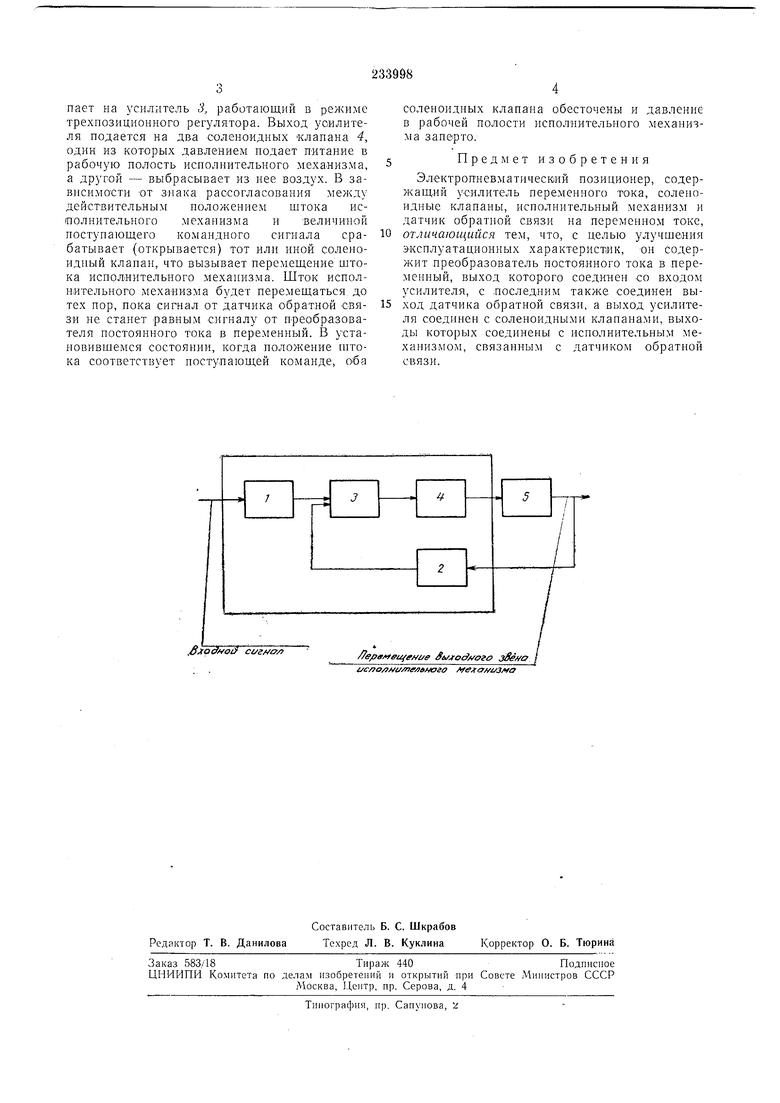
Схема устройства изображена на чертеже.
Оно содержит преобразователь / постоянного тока в переменный, датчик 2 обратной связи, усилитель ., соленоидные клапаны 4, пневматический исполнительный механизм 5.
Устройство работает следующим образом.
Управляющий сигнал поступает на преобразователь /, преобразующий постоянный ток в пропорциональное переменное напряжение. Зто напряжение складывается с переменным напряжением от датчика 2 обратной связи по положению выходного звена (штока) исполнительного .механизма, сумма сигналов посту
пает на усилитель 3, работающий в режиме трехпозиционного регулятора. Выход усилителя подается на два соленоидных клапана 4, один из которых давлением подает питание в рабочую полость исполнительного механизма, а другой - выбрасывает из нее воздух. В зависимости от знака рассогласования между действительным положением штока исполнительного механизма и величиной поступающего командного сигнала срабатывает (открывается) тот или иной соленоидный клапан, что вызывает перемещение щтока испоЛНительного механизма. Шток исполнительного механизма будет пере.мещаться до тех пор, пока сигнал от датчика обратной связи не станет равным сигналу от преобразователя постоянного тока в переменный. В установившемся состоянии, когда положение штока соответствует поступающей команде, оба
соленоидных клапана обесточены и давление в рабочей полости исполнительного механизма заперто.
Предмет изобретения
Электропневматическ1ИЙ позиционер, содержащий усилитель переменного тока, соленоидные клапаны, исполнительный механиз.м и датчик обратной связи на переменном токе,
отличающийся тем, что, с целью улучшения эксплуатационных характеристик, он содержит преобразователь постоянного тока в перемеиный, выход которого соединен со входом усилителя, с .последним также соединен выход датчика обратной связи, а выход усилителя соединен с соленоидными клапанами, выходы которых соединены с исполнительным механизмом, связанным с датчиком обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ КОНТРОЛЛЕР ДЛЯ УСТРОЙСТВА АВАРИЙНОГО ЗАКРЫТИЯ | 2006 |
|
RU2413115C2 |
| СИСТЕМА АВАРИЙНОГО ОСТАНОВА | 2006 |
|
RU2406102C2 |
| Способ компенсации нелинейности акселерометра | 1975 |
|
SU690395A1 |
| ПОЗИЦИОНЕР ПРИВОДНОГО МЕХАНИЗМА | 2012 |
|
RU2489606C1 |
| ПОЗИЦИОНЕР КЛАПАНА С ВОЗМОЖНОСТЬЮ ЗАЩИТЫ ОТ ИЗБЫТОЧНОГО ДАВЛЕНИЯ | 2015 |
|
RU2668504C2 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU302692A1 |
| СПОСОБ И УСТРОЙСТВО С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ УПРАВЛЯЮЩЕЙ СИСТЕМЫ | 2005 |
|
RU2393369C2 |
| НЕПРЕРЫВНО ДЕЙСТВУЮЩАЯ АВТОМАТНЧЕСКАЯ УСТАНОВКА ДЛЯ ПОДБРАЖИВАННЯ И СПИРТОВАНИЯ БРОДЯЩЕГО СУСЛА | 1971 |
|
SU290909A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ С АКСЕЛЕРОМЕТРОМ ДЛЯ ОБРАТНОЙ СВЯЗИ ПО ПОЛОЖЕНИЮ | 2015 |
|
RU2694803C2 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
j8Jio(Hocf ct/г/ о/
/ efleMeu{effife Si od//oeo 3Sef/o i/c/}o/ f i//ne/ tfxiao ejro/ytjSMO
