Изобретение относится к контрольно- измерительной технике, а точнее к контролю физико-механических параметров длинномерных конструкций и протяженных сред и является усовершенствованием известного способа контроля состояния длинномерного объекта, описанного в авт. св. СССР № 1742615, 1987.
Целью дополнительного изобретения является повышение достоверности контроля за счет предварительной калибровки.
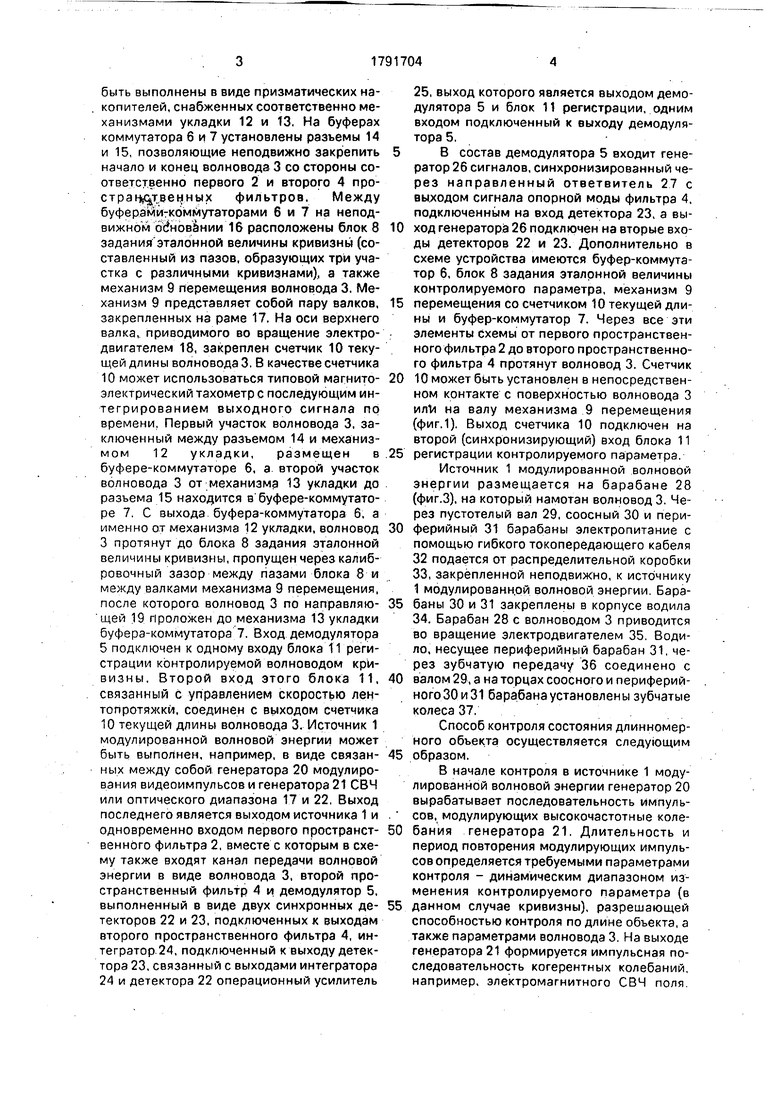
На фиг. 1 приведена конструкция устройства, реализующего способ контроля состояния длинномерного объекта; на фиг.2 - его функциональная схема; на фиг.З - конструкция буфера-коммутатора барабанного типа.
Устройство для контроля состояния длинномерного объекта (фиг. 1) содержит соединенные между собой источник 1 модулированной волновой энергии и первый пространственный фильтр 2, волновод 3, второй пространственный фильтр 4, вход которого посредством волновода 3 соединен с выходом первого фильтра 2, демодулятор 5, включенный на выходе второго фильтра 4, первый 6 и второй 7 буферы-коммутаторы, между которыми размещен блок 8 задания эталонной величины контролируемого параметра.О механизм 9 перемещения волновода 3, счетчик 10 кинематически связанный с механизмом 9 и блок 11 регистрации контролируемого параметра, подключенный к выходу демодулятора 5.
При выборе в качестве контролируемого параметра кривизны образующей поверхности длинномерного объекта, как показано на фиг. 1, буфер-коммутаторы 6 и 7 могут
VI
Ю
ч
g
К)
быть выполнены в виде призматических накопителей, снабженных соответственно механизмами укладки 12 и 13, На буферах коммутатора б и 7 установлены разъемы 14 и 15, позволяющие неподвижно закрепить начало и конец волновода 3 со стороны соответственно первого 2 и второго 4 про- стрэн твенных фильтров. Между буферамиткоммутаторами б и 7 на неподвижном основании 16 расположены блок 8 задания эталонной величины кривизны (составленный из пазов, образующих три участка с различными кривизнами), а также механизм 9 перемещения волновода 3. Механизм 9 представляет собой пару валков, закрепленных на раме 17. На оси верхнего валка, приводимого во вращение электродвигателем 18, закреплен счетчик 10 текущей длины волновода 3. В качестве счетчика 10 может использоваться типовой магнитоэлектрический тахометр с последующим интегрированием выходного сигнала по времени, Первый участок волновода 3, заключенный между разъемом 14 и механизмом 12 укладки, размещен в буфере-коммутаторе 6, а второй участок волновода 3 от механизма 13 укладки до разъема 15 находится в буфере-коммутаторе 7. С выхода буфера-коммутатора 6, а именно о.т механизма 12 укладки, волновод 3 протянут до блока 8 задания эталонной величины кривизны, пропущен через калибровочный зазор между пазами блока 8 и между валками механизма 9 перемещения, после которого волновод 3 по направляющей 19 проложен до механизма 13 укладки буфера-коммутатора 7. Вход демодулятора 5 подключен к одному входу блока 11 регистрации контролируемой волноводом кривизны. Второй вход этого блока 11, связанный с управлением скоростью лен- топротях кй, соединен с выходом счетчика 10 текущей длины волновода 3. Источник 1 модулированной волновой энергии может быть выполнен, например, в виде связанных между собой генератора 20 модулирования видеоимпульсов и генератора 21 СВЧ или оптического диапазона 1.7 и 22, Выход последнего является выходом источника 1 и одновременно входом первого пространственного фильтра 2, вместе с которым в схему также входят канал передачи волновой энергии в виде волновода 3, второй пространственный фильтр 4 и демодулятор 5, выполненный в виде двух синхронных детекторов 22 и 23, подключенных к выходам второго пространственного фильтра 4, интегратор 24, подключенный к выходу детектора 23, связанный с выходами интегратора 24 и детектора 22 операционный усилитель
25, выход которого является выходом демодулятора 5 и блок 11 регистрации, одним входом подключенный к выходу демодулятора 5,
5В состав демодулятора 5 входит генератор 26 сигналов, синхронизированный через направленный ответвитель 27 с выходом сигнала опорной моды фильтра 4, подключенным на вход детектора 23, а вы0 ход генератора 26 подключен на вторые входы детекторов 22 и 23. Дополнительно в схеме устройства имеются буфер-коммутатор 6, блок 8 задания эталонной величины контролируемого параметра, механизм 9
5 перемещения со счетчиком 10 текущей длины и буфер-коммутатор 7. Через все эти элементы схемы от первого пространственного фильтра 2 до второго пространственного фильтра 4 протянут волновод 3. Счетчик
0 10 может быть установлен в непосредственном контакте с поверхностью волновода 3 ил1л на валу механизма 9 перемещения (фиг.1). Выход счетчика 10 подключен на второй (синхронизирующий) вход блока 11
5 регистрации контролируемого параметра.
Источник 1 модулированной волновой энергии размещается на барабане 28 (фиг.З). на который намотан волновод 3. Через пустотелый вал 29, соосный 30 и пери0 ферийный 31 барабаны электропитание с помощью гибкого токопередающего кабеля 32 подается от распределительной коробки 33, закрепленной неподвижно, к источнику 1 модулированной волновой энергии. Бара5 баны 30 и 31 закреплены в корпусе водила 34. Барабан 28 с волноводом 3 приводится во вращение электродвигателем 35. Водило, несущее периферийный барабан 31, через зубчатую передачу 36 соединено с
0 валом 29, а на торцах соосного и периферий- ногоЗОи31 барабана установлены зубчатые колеса 37.
Способ контроля состояния длинномерного объекта осуществляется следующим
5 образом.
В начале контроля в источнике 1 модулированной волновой энергии генератор 20 вырабатывает последовательность импуль сов, модулирующих высокочастотные коле0 бания генератора 21. Длительность и период повторения модулирующих импульсов определяется требуемыми параметрами контроля - динамическим диапазоном изменения контролируемого параметра (в
5 данном случае кривизны), разрешающей способностью контроля по длине объекта, а также параметрами волновода 3. На выходе генератора 21 формируется импульсная последовательность когерентных колебаний, например, электромагнитного СВЧ поля.
та последовательность когерентных колеаний поступает на вход пространственноо фильтра 2. В этом фильтре 2 происходит реобразование пространственной струкуры СВЧ поля таким образом, чтобы на входе волновода 3 эта структура соответствовала требуемой структуре по меньшей мере одной опорной моды. Так формируется и подается в волновод 3 опорная мода. Распространяясь по волноводу 3, опорная мода возбуждает измерительную моду погонным коэффициентом взаимодействия между брганйзованн ыми модами, пропОрцйбнальнымн изменению кривизны вдоль оси волновода 3. Следовательно, из- меритель най мода является также импульс- ным сигналом, когёреИтным с сигналом опорной мод ьГ За счёт заранее созданного разного зэмедлёни я фазовых скоростей опорной и измер йтель ной мод в волноводе. 3 обеспечивается распространение мод с различными скоро СУши, что далее создает возможность с помоЩь ю маештабног о п рё- образования перейтй в дёМодулятЬ ре 5 от временной координаты в сигнале, соответствующем распределению кривизны, к пространственной вдоль оси волновода 3.
Проходя через пространственный фильтр 4, опорная и измерительная моды разделяются в пространстве и поступают на первые входы соответственно синхронных детекторов 22 и 23. Эти входы является входами демодулятора 5. Направленный ответ- вител ь 27 отделяет некоторую часть энергии опорной моды с первого входа синхронного детектора 23 для синхронизации генератора 26. Остальная часть энергии передается на первый вход синхронного детектора 23. Одновременно на вторые входы синхронных детекторов 22 и 23 подается сигнал генератора 26 в виде когерентного с с игна- лом опорной моды СВЧ поля, за счет чего осуществляются синхронные (с сохранением знака огибающей СВЧ импульсов измерительной моды) детектирования СВЧ полей. На выходах синхронных детекторов 22 и 23 появляются таким образом электрические сигналы. Причем сигнал на выходе синхронного детектора 23 пропорционален огибающей сигнала опорной моды, а сигнал на выходе синхронного детектора 22 пропорционален (с учетом знака) огибающей сигнала измерительной моды, который в свою очередь является отображением распределения приращения кривизны вдоль оси волновода 3, задаваемой блоком 8.
Электрические импульсы опорного сигнала с выхода синхронного детектора 23 поступают на вход интегратора 24, на выходе которого образуется электрический сигнал, соответствующей амплитуде входного импульсного Сигнала (сигнал интегральной амплитуды). Сигнал с выхода интегратора 24 пбдается на первый вход операционного
усилителя 25 , на второй вход которого подается измерительный сигнал с выхода синхронного детектора 22. На выходе операционного усилителя 25 (осуществляющего также интегрирование) снимается
0 электрический сигнал, величина котброго определяете величиной интеграла от приращения кривизны вдоль оси волновода 3 и не зависит of величины огтбрного сигнала. С выхода операционного усилителя 25, явля5 ющегося выходом демодулятора 5, сигнал, соответствующий распределению кривизны вдоль оси волновода 3, поступает на вход блока 11 регистрации. На другой вход этого блока 11 подается сигнал с выхода счетчика
0 10 текущей длины волновода 3 за счет чего осуществляется синхронизация записи рас1 преДе лёйия кривизны по показаниям вол- н бврда 3 с учетом его перемещения относительно блока 8 задания эталонной
5 величины кривизны с помощью механизма 9. Затем, сравнивая зарегистрированные блоком 11 показания волновода 3 с эталонными заданными величинами кривизны, оп- ределяют погрешности измерения
0 контролируемого параметра вдоль оси волновода 3, По полученным распределениям погрешностей измерений в пределах заданной чувствительности динамического диапазона изменения контролируемого
5 параметра устанавливаются гарантированное погрешности аппаратуры контроля и доверительные интервалы их изменений. Фор мула изобретения
1. Способ контроля состояния длинно0 мерного объекта по авт. св. № 1742615; отл и- а ю щ и и с я темГчто, с целью повышения достоверности контроля за счет предварительной калибровки, перед размещением в зоне контроля длинномерного объекта, вол5 поводе возбужденными опорными и инфор- мативными модами перемещают в направлении гго продольной оси через зону с известной эталонной величиной контролируемого параметра, в процессе перемеще0 ниярегистрируют величину контролируемого параметра по показаниям волновода и соответствующую ей координату вдоль оси волновода, затем сравнивая зарегистрированные показания с известной
5 эталонной величиной, устанавливают распределение погрешности контроля вдоль оси волновода.
2. Способ по п. 1,отличающийся тем, что в зоне с известной эталонной величиной контролируемого параметра выделятребуемой разрешающей способности контроля по длине волновода, а на границах выделенного участка создают изменение контролируемого параметра, равное заданной чувствительности контроля.
3. Способ по п.1, о т л и ч а ю щи и с я тем, что в зоне с известной эталонной величиной контролируемого параметра выделяют два участка с протяженностью каждого не меньше требуемой разрешающей способности контроля по длине волновода, на одном выделенном участке создают минимальную, а на другом максимальную величины контролируемого параметра, соответственно равные нижнему и верхнему пределам заданного динамического диа- пазона изменения контролируемого параметра.
4. Устройство для контроля состояния длинномерного объекта по авт. св. Ns 1742615, о тличающееся тем, что, с целью повышения достоверности контроля, оно дополнительно содержит два буфера- коммутатора, блок задания эталонной вели0
5
0
5
чины контролируемого параметра, механизм перемещения волновода, счетчик текущей длины волновода и блок регистрации контролируемого параметра, причем блок задания эталонной величины контролируемого параметра с пропущенным через него волноводом установлен между пространственными фильтрами, первый участок волновода, заключенный между выходом одного пространственного фильтра и входом задания эталонной величины контролируемого параметра, а также второй участок волновода, заключенный между выходом этого блока и входом другого пространственного фильтра, помещены каждый в буфере- коммутаторе, кроме того, счётчик текущей длины волновода кинематически связан с механизмом перемещения волновода, установленным на выходе блока задания эталонной величины контролируемого параметра, а блок регистрации контролируемого параметра подключен к выходу демодулятора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1988 |
|
SU1793213A2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661674C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670570C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2698106C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| Способ контроля состояния длинномерного объекта | 1987 |
|
SU1791702A2 |
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1987 |
|
SU1742615A1 |
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1987 |
|
SU1791757A2 |
| Способ контроля состояния длинномерного объекта | 1987 |
|
SU1791703A2 |
| Стенд для исследования напряженного состояния рельсов, дефектов рельсов и колес подвижного состава | 2021 |
|
RU2755595C1 |


Изобретение относится к контрольно- измерительной технике. Цель изобретения - повышение достоверности контроля за счет предварительной калибровки - достигается посредством того, что перед размещением в зоне контроля длинномерного объекта волновод с возбужденными опорными и измерительными модами колебаний перемещают в направлении его продольной оси через зону с известной эталонной величиной контролируемого параметра, в процессе перемещения регистрируют величину контролируемого параметра по наказаниям волновода, затем, сравнивая зарегистрированные показания с известной эталонной .величиной, устанавливают распределение погрешности кон тролявдоль оси волновода, которое учитывают в процессе контроля. 2 с. пф-лы и 2 з.п. ф-лы, 3 ил. ел С
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1987 |
|
SU1742615A1 |
