Изобретение относится к контрольно-измерительной технике, и может быть использовано для контроля координат характерных точек в комбинированных средах.
Целью изобретения является контроль в нестабильной (.юдной) среде положения свободного конца троса, второй конец которого закреплен за счет использования неподвижной системы координат и параметров длинномерного обьекта-троса. .
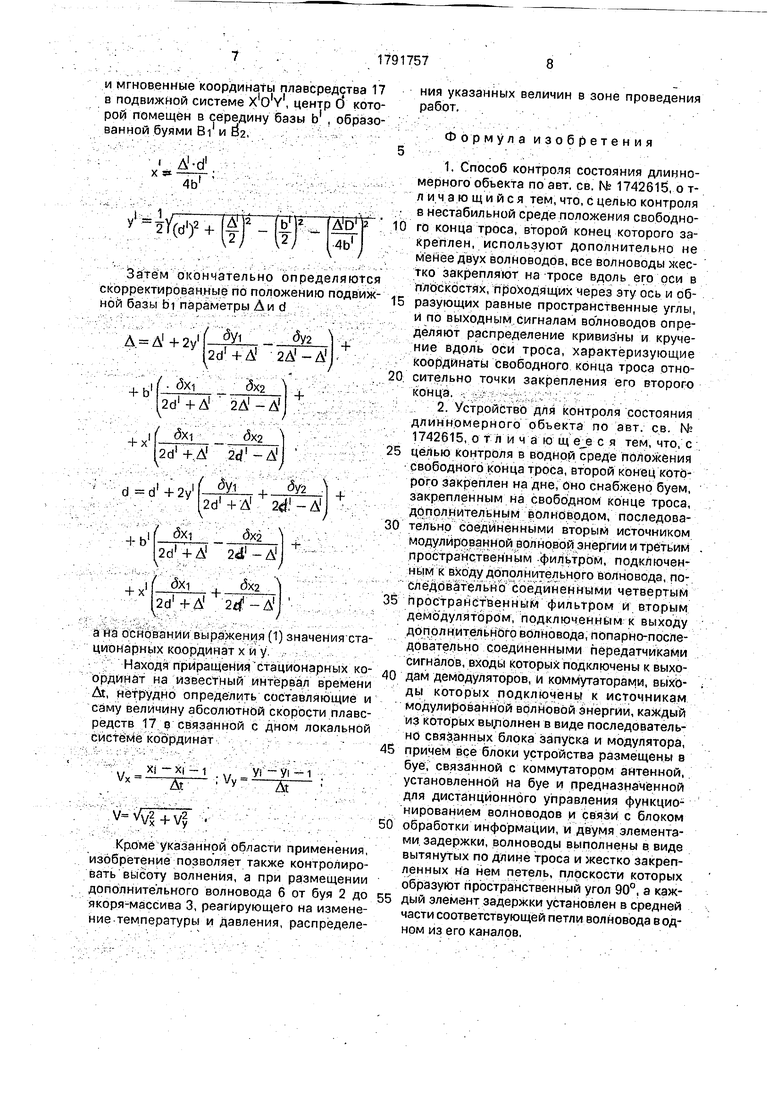
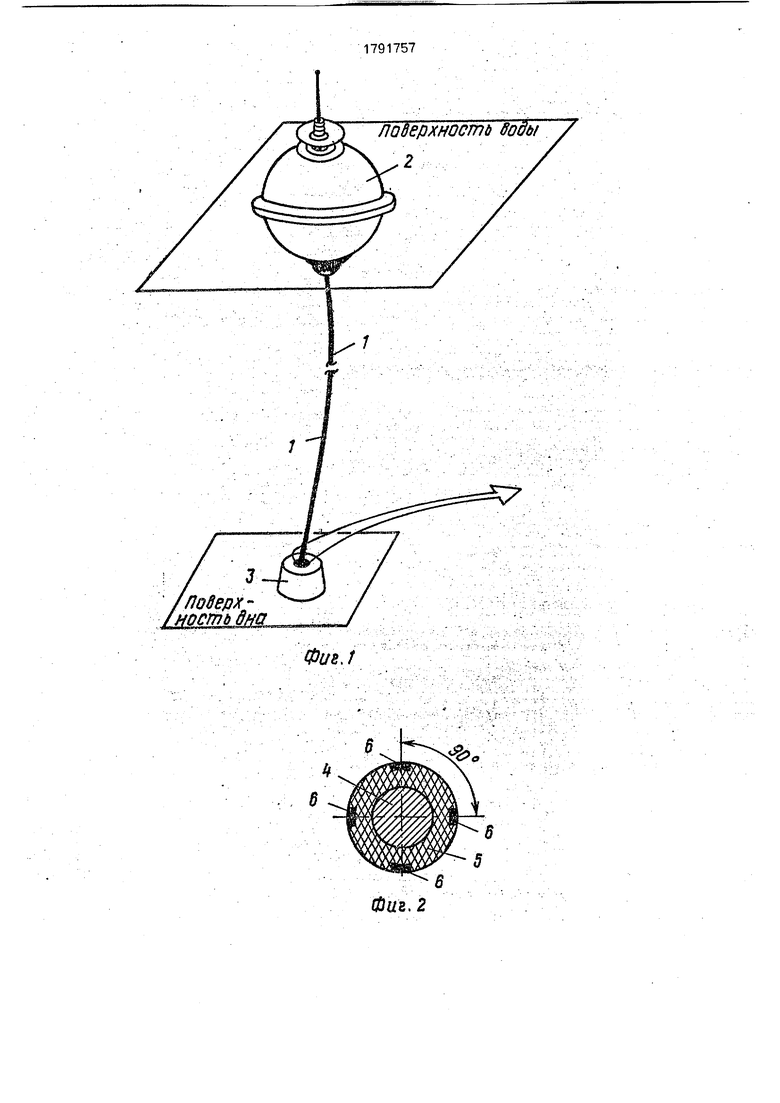
Нафиг.1 показан длинномерный объект в виде троса с закрепленными буем и якорем-массивом; на фиг,2 - поперечное сечение троса с оболочкой и волноводами; на фиг.З - нижняя часть тросах волноводами и элементами врем л-:ной задержки в их каналах; на фиг.4 представлена функциональная схема устройства, на примере его использования для определения положений плаве- редства при его использовании в качестве базы измерений; а на фиг.5 - структурная схема устройства, реализующего этот принцип; на фиг.6 изображена структурная схема - устройства контроля повышенной надежности при организации базы измерений вне плавсредства, а на фиг.7 поясняющее работу этой схемы геометрическое построение.
Устройство для контроля состояния длинномерного объекта содержит длинномерный объект в виде троса 1 с закрепленным на его свободном конце буем 2, а на другом конце - якорем-массивом 3, причем трос содержит грузонесущие жилы 4 и заключен в защитную оболочку 5, два много- модовых волновода 6, выполненных в виде вытянутых по длине троса 1 и жестко за
ю XI
(Л
ч
к
крепленных на нем петель, плоскости которых образуют пространственный угол 90°, элементы 7 задержки, каждый из которых установлен в средней части соответствующей петли волновода б з одном из его кана- лов, подключенные к входу каждого волновода 6 последовательно соединенные источник модулированной волновой энергии, вы прлйёвйый в виде последовательно сВединенШх блока 8 запуска и модулятора 9,и npocTplHcfвенный фильтр 10, подключенные к выходу каждого волновода 6 последовательно соединенные пространственный фильтр 11, демодулятор 12, передатчик 13 сигналов и коммутатор 14, выход которого подключен к блоку 8 запуска и имеющий связь с антенной 15, установленной на буе 2 и предназначенной для дистанционного управления функционированием волноводов 6 и связи с блоком 16 обработки инфор- мации. Все блоки устройства размещены в буе 2. В случае использования результатов контроля для определения положения и скорости плавсредства 17 (фиг.5) устройство дополнительно содержит размещенные на плавсредстве 17 две антенны 18, позволяющие использовать его корпус в качестве ба- зы, каждая из которых соединена с приемником 19 и передатчиком 20 на плав- средстве 17 через свой коммутатор, а выходы обоих приемников 19 являются входами блока 16 обработки информации. Для более надежного определения координат и скорости плавсрёдства 17 (фиг.6) может быть использован дополнительный трос 1 с закрепленными на его концах дополнительными буем 2 и якорем-массивом 3, при этом, якори-массивы 3 соединены между собой тросом, вдоль которого в оболочке также закреплены волноводы 6, являющиеся про- должением ранее указанных волноводов 6.
Способ контроля состояния длинномерного объекта с помощью устройства осуществляется следующим образом,
Для исключения использования воды в качестве среды распространения сигналов (фиг. 1) от поверхности до дна устана-вливается длинномерный объект в виде троса 1с закрепленными в верхней точке буем 2 и в нижней якорем-массивом 3. Длина троса 1, плавучесть буя 2 и масса якоря 3 выбираются из известных соображений для фиксации нижней точки троса 1 на дне и нахождении буя 2 на поверхности воды с учетом волне- ния для заданного района и глубины.
Для измерения распределений кривизны и кручения вдоль оси цилиндрического длинномерного объекта-троса 1, которые являются натуральными уравнениями пространственной кривой и однозначно определяют ее форму и положение в пространстве, достаточно разместить по образующим под одинаковым углом в плоскости поперечного сечения конструкции по крайней мере три волновода 6 для измерения кривизны образующих. В то же время удобство размещения электронной аппаратуры в буе 2 (отсутствие требований к глубоководному исполнению и доступность при эксплуатации), а также возможность установки элементов 7 временной задержки в точке присоединения троса 1 к якорю 3 в одном из каналов волновода б с помощью перегиба последнего у якоря 3, позволяет с помощью лишь двух волноводов б организовать на поверхности троса 1 четыре измерительных волноводных линии под углом 90° друг к другу. Введение элемента 7 временной задержки, величина которой выбирается равной максимальной длительности сигнала в
-: - . : .-.: -: . ..: . -
опорно-информативном канале t -p, где
...
I-Длина троса (волновода 6 в одном направлении); с - скорость света в вакууме или скорость звука в среде заполнения волновода б; / -1 замедле ние в волноводе 6, позволяет разделить на.выходе волновода б сигналы, пропорциональные распределению кривизны вдоль диаметрально-противоположных образующих троса 1.
С помощью измеренных с помощью волноводов б. четырех распределений кривизны Kj(S) вычисляется радиус-вектора R(S) определяющий положение буя 2 по отношению к якорю 3 (см. фиг.4). Для определения положения и скорости плавсрёдства 17 поместим начало пространственной инерци- альной декартовой системы координат OXYZ в определяемое дальностями dt и d2 положение буя 2. направив координату Z по оси недеформированного вертикально расположенного .троса 1, соединенного на дне с якорем 3. Под действием внешних возмущений буй 2 сместится и займет положение О , определяемое радиус-вектором R1 (S). В этом случае новое положение буя 2 будет характеризоваться R1 (S) на оси ОХ и OY в горизонтальной плоскости поверхности воды соответственно (5х и 5у, а также новыми дальностями di и d2 До антенн плавсрёдства 17 образующими базу Ь. Затем, определяя дальности di1 и da любым известным методом, с помощью значений базы Ь, отключений (5х и 5у определяется положение плавсредств а 17 по отношению к точке 0.
По сформированным передатчикам 13 йа плавсредстве 17 в СВЧ или оптическом диапазоне волн сигналам, передаваемым
через свой коммутатор 22 и антенну 18, поочередно возбуждается антенна 15, расположенная на буе 2, принятым сигналом, с которой через коммутатор 14 также на буе 2 включается блок 8 запуска модулятора 9, Модулятор 9 генерирует также в СВЧ или оптическом диапазоне пространственные волны через фильтр 10, возбуждающие опорные каналы волноводов 6 (на фиг.5 для упрощения рисунка показан один волновод 6), например, в оптическом диапазон е. Этот сигнал, распространяясь вдоль волновода 6, возбуждает измерительные каналы за счет связи между модами каналов, которая функционально зависит вдоль волновода 6 от распределения измеряемой кривизны троса, а следовательно и кривизны самого волновода 6. Тем самым осуществляется пространственная модуляция опорного и измерительных сигналов. За счет разности фазовых и групповых скоростей мод опорного и измерительного каналов на выходе каждого волновода 6 получается временная модуляция сигналов, Выделяя на выходе волновода б измерительный и опорный сиг- налы через разделительный пространственный фильтр 11, по их временной модуляции с помощью масштабных преобразований определяется распределение кривизны Ki (S) вдоль оси волновода, в тем самым и кривизны троса. На выходе демодулятора 12 после поступления информации на его вход через фильтр 11 с выхода измерительного канала волновода 6 вырабатывается сигнал, пропорциональный кривизне образующей оболочки троса 1 от буя 2 до якоря-массива 3. Этот сигнал, усиленный и подготовленный к распределению через воздушную среду передатчиком 13, с помощью коммутатора 14 подводится к антенне 15 на буе 2 и передает- ся на антенны 18 плавсредства 17. После прохождения через коммутатор 21 и поступления в приемник 19 информация с буя 2 обрабатывается блоком 1.6 на плавсредстве 17 и после определения двух дальностей и положения буя 2 относительно якоря-массива 3 вычисляются координаты плавсредства 17 в локальной донной системе координат. В качестве блока 16 обработки информации может использоваться стандартная микроЭВМ или микропроцессор. Далее полученная информация из блока 16 поступает в систему динамического позиционирования и на видеоконтрольные устройства (на фиг.5 не показаны). По известному положению плаве- редства 17 относительно якоря-массива 3 через приращения в единицу времени определяется абсолютная скорость плавсредства 17 относительно дна. Можно также использовать допплеровский эффект, определяя сдвиг частот при установке пассивного отражателя (например, зеркального сферического) на буе 2.
Устройство (фиг.6) работает аналогично ранее описанному с отличиями в том, что с помощью волноводов 6 вдоль троса 1 на участке между якорями-массивами 3 определяется расстояние между последними, которое является неподвижной измерительной базой. Подробнее работа устройства по фиг.6 иллюстрируется геометрическим построением. на фиг.7, где исходное положение плавсредства 17 обозначено Р, положение якорей-массивов 3 на дне BI и В2, а буев 2, соответственно, Вги 62. Поместим начало 0 неподвижной плоскости (горизонтальной) системы декартовых координат XOY в середину базы Ь, образованной точками ЕЙ и В2, ось OY направим перпендикулярно 8182, а ось ОХ вправо вдоль базы Ь. Соединим отрезками прямых точку 3 с точками BI и В2, получив две дальности, соответственно, di и d2, определяющие положение плавсредства 17 в донной системе координат, тогда
d (di+ d2)/2 -dz.
В декартовой системе положение плавсредства 17 определяется известным образом из соотношений:
х
A-d 4b
У lYd2 + ( fbf (ДОГ (1)
12J (Ч Ы , В реальных условиях на плавсредстве 17 определяют дальности di1 и Й2 добуев2 (соответственно BI и 82):
di (dil + d2l)/d, A di -d2
и отклонения буев 2 от якорей-массивов 3, обозначенные на фиг.70 соответственно (5xi, 5x2,Syi,5 у 2.
На основании тригонометрических соотношений и условия b (5xi,2, (легко достигаемое на практике, так как отклонения заякорного буя составляет несколько десятков метров, а база b при глубине более километра из соображений удобства спуска якорей-массивов и размещающей способности по дальности, должна быть больше глубины, т.е. несколько километров), на плавсредства 17 определяется мгновенное значение новой, подвижной базы Ь1
b Уф+бх )2 +(с5У2
):
,2 (2)
Фиг. 2
«5
А
Ч Л
17


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2698106C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1988 |
|
SU1791704A2 |
| Способ контроля состояния длинномерного объекта | 1987 |
|
SU1791702A2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ | 2014 |
|
RU2568071C1 |



Изобретение относится к контрольно- измерительной технике физико-механических величин и может быть использовано для контроля координат характерных точек в нестабильных средах. Цель изобретения- контроль в нестабильной среде положения конца троса, второй конец которого закреплен, Для этого используют не менее 3 вол- новодбв, которые закрепляют на тросе вдоль его оси так, что плоскости их размещения образуют равные пространственные углы, С ;помощью волноводов определяют распределение кривизны и кручения вдоль оси троса и используют полученные данные для определения положения его свободного конца. Способ осуществляется с помощью устройства, которое Содержит трос в цилиндрической оболочке; по образующим которой жестко закреплены волноводы, в верхней точке троса закреплен буй с антенной и аппаратурой, приема передачи, а в нижней якорь-массив. 2 с,п.ф-лы, 7 ил. (Л
«э
stL
1%
. -
III
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1987 |
|
SU1742615A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
