Изобретение относится к транспортному и сельскохозяйственному машиностроению, в частности к устройствам для взвешивания и транспортировки сельскохозяйственных животных и грузов, а также может быть использовано при проведении физиологических исследований и получения экспериментальных данных.
Целью изобретения является повышение точности измерения массы незафиксированного перевозимого животного.
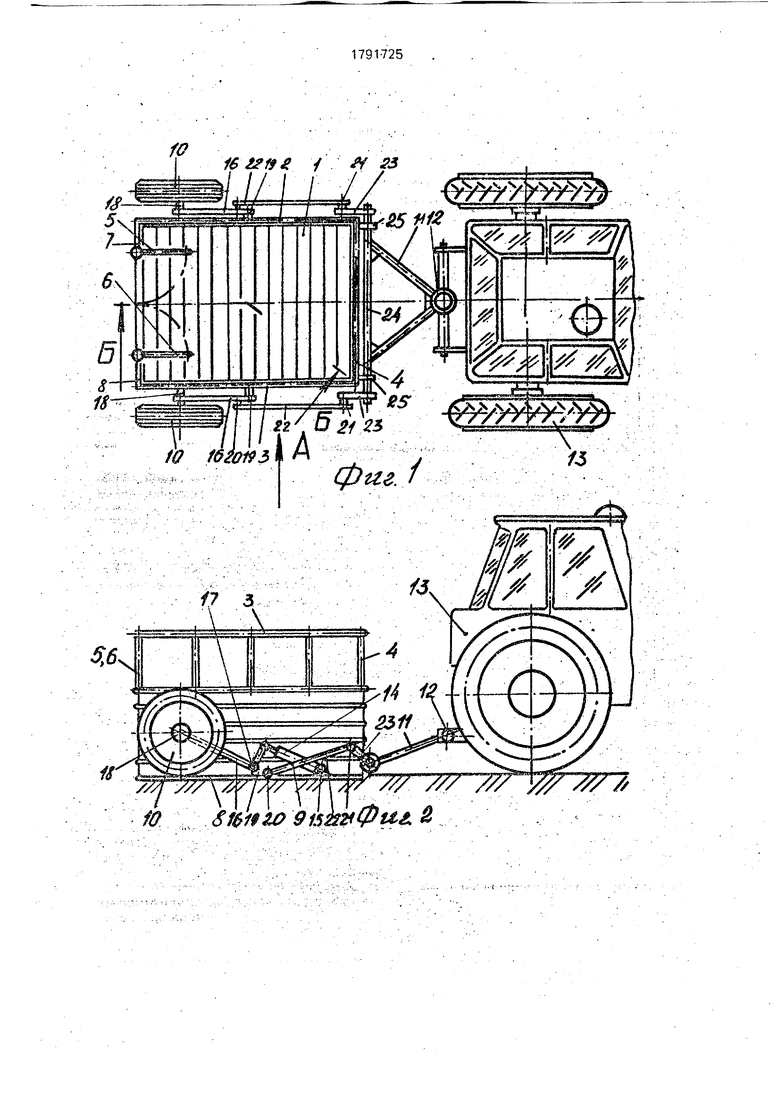
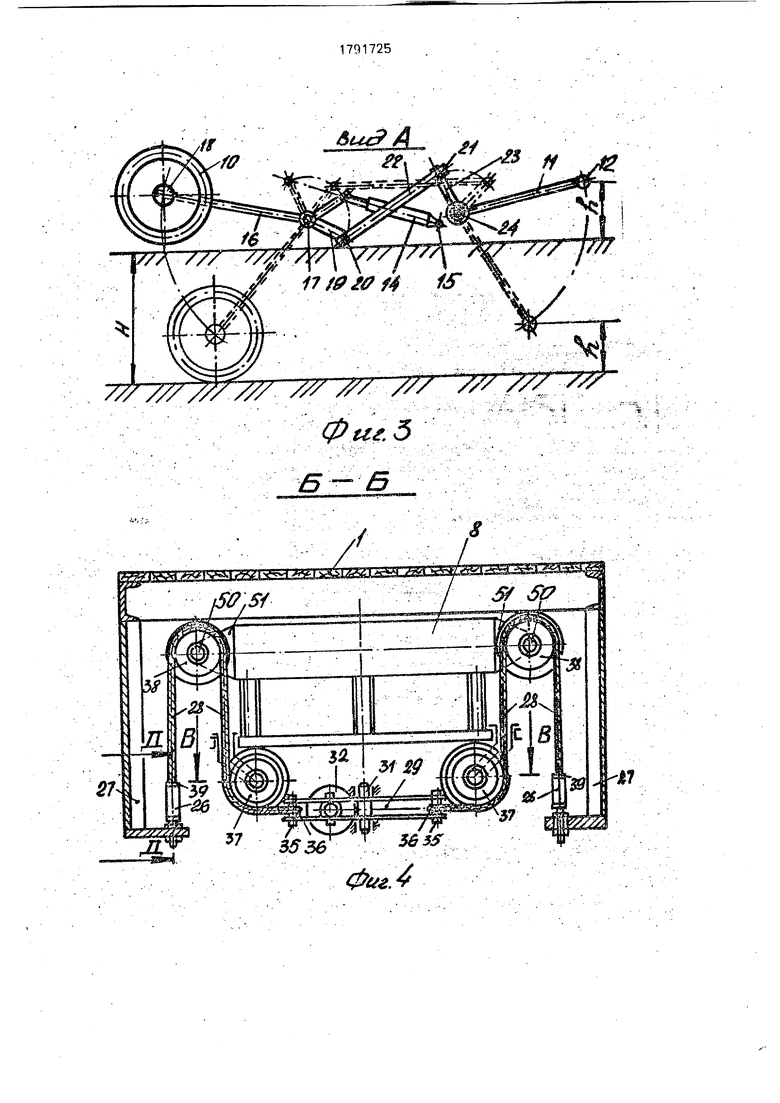
Изобретение поясняется чертежами. На фиг.1 показано взвешивающее устройство, размещенное на транспортном средстве, вид в плане; на фиг.2 - то же, при загрузке животных перед взвешиванием, вид сбоку; на фиг.З - вид А на фиг.1, механизм перевода мобильной рамы транспортного средства с напольного положения в транспортное; на
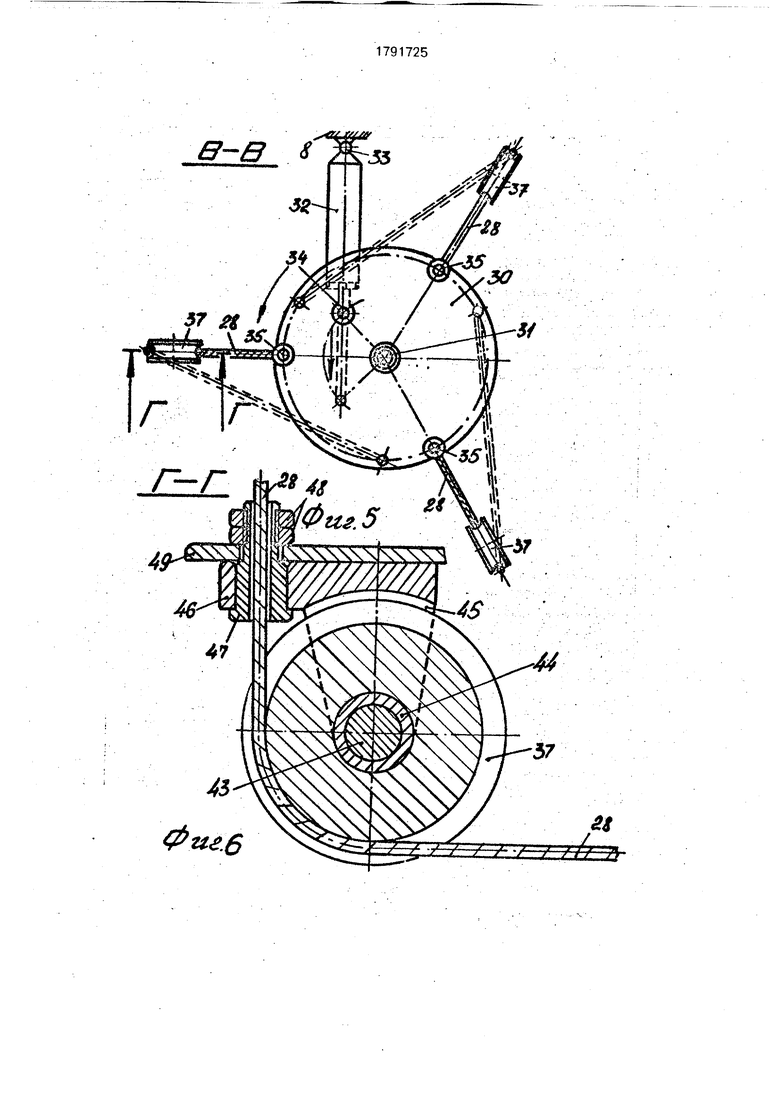
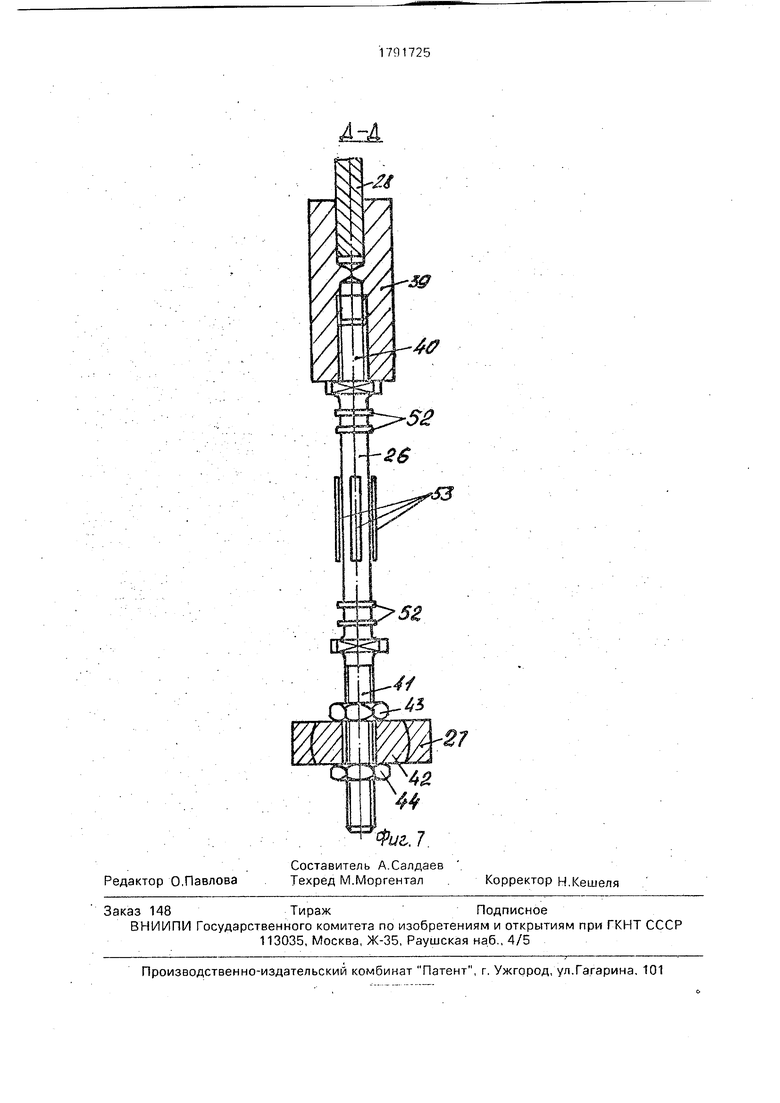
фиг.4 - сечение Б-Б на фиг.1; на фиг.5 - сечение В-В на фиг.4; на фиг.6 - сечение Г-Г на фиг.5; на фиг.7 - сечение Д-Д на фиг.4.
Взвешивающее устройство смонтировано на транспортном средстве (фиг.1 и 2) и содержит прицепную емкость а виде грузовой платформы 1, боковых 2, 3 и переднего 4 бортов, створок 5 и 6 между частями 7 и 8 заднего борта, мобильной рамы 8, механизма 9 перевода мобильной рамы 8 с напольного положения в транспортное, двух опорных колес 10, прицепа 11, серьги 12, соединенной шарнирно с транспортным средством 13.
Механизм 9 (фиг. 1-3) перевода мобильной рамы с напольного положения в транспортное содержит два силовых цилиндра 14, взаимно соединенных параллельно и
4j
ч
Ч
ю ел
связанных гидроарматурой с раздельно-агрегатной гидравлической системой транспортного средства 13. Основания силовых цилиндров 14 шарнирно соединены консолями 15 с мобильной рамой 8. Штоки цилиндров 14 связаны с короткими плечами балок 16, размещенных на осях 17. На свободном конце б&лки /16 на полуоси 18 размещено .Ж6ле:со 10. Кронштейн 19 балки 16 посредством пальцев 20 и 21, тяги 22ги1кр нштёйна 23 полой оси 24 управляет положением прицепа 11с серьгой 12, Полая ось 24 соединена с рамой 8 кронштейнами 25. Кинематическая цепь звеньев полой оси 24, кронштейнов 23, тяг 22, балки 16 производит синхронное перемещение опорных колес 10 по отношению к раме 8.
Измерительный механизм (фиг.4-7) соединяет грузовую платформу 1 с мобильной рамой 8 с помощью электрических вспомогательных датчиков 26 и гибких элементов 28. Электрический вспомогательный датчик 28 выполнен в виде комплекта тензометрй- ческих вертикальных стержней 26, размещенных, в трех базовых точках мобильной рамы 8 и электрически связанных с блоком регистрации и обработки информации (на чертежах не показано). Каждый тензбмётри- ческий стержень датчиков 26 нижним концом шарнирно закреплен на L-образнОм кронштейне 27 грузовой платформы 1. Верхние концы тензометрических стержней датчиков 26 прикреплены к гибким тягам 28 и соединены с механизмом 29 подъема грузовой платформы 1.ч
Механизм 29 подъема грузовой платформы (фиг.4 и 5) выполнен в виде приводного ротора 30 с вертикальной осью вращения 31, снабженного гидроприводом 32. Основание гидропривода 32 шарниром 33 соединено с мобильной рамой 8. Шток гидропривода 32 пальцем 34 связан с приводным ротором 30. На периферийной части ротора 30 с равным шагом размещены три оси 35, которые коушами 36 соединены с гибкими тягами 28. Ветви гибких тяг 28 запасованы на вертикально разнесенных парных флюгерном 37 (фиг.6) и неподвижном 38 блоках, а их концы соединены с тен- зометрическими стержнями 26 через переходные втулки 39. Нижний конец тен- зометрическогб стержня 26 (фиг.7) соединен через резьбовую часть шпильки 40 с переходной втулкой 39. Вторая резьбовая шпилька 41 тензометрического стержня 26 соединена с шаровой втулкой 42 гайками 43 и 44. Шаровая втулка 42 размещена на горизонтальной полке L-образного кронштейна 27.
Флюгерный блок 37 (фиг.4-6) на оси 43 размещен на подшипнике скольжения 44. В свою очередь ось 43 зафиксирована в вилке 45 кронштейна 46, которая шарнирно раз.мещена в полой резьбовой оси 47. Ось 47 закреплена гайками 48 на кронштейне 49 рамы 8. В полой части резьбовой оси 47 пропущена ветвь гибкой тяги 28. Неподвижный блок 38 размещен на оси 50 и вилкой 51
0 соединен с рамой 8. :
Блок регистрации и обработки информации размещен в кабине транспортного средства 13. В качестве блока регистрации информации использован тензометриче5 ский усилитель ТОПАЗ-3, соединенный экранированными . кабелямис тензометрическими стержнями 26. На поверхности стержней 26 наклеены тензоре- зисторные датчики 52 и 53, которые
0 последовательно соединены на трех стержнях в одноименные плечи по полумостовой .. схеме. Выходной сигнал с тензоусилителя идет на преобразователь, обрабатывающий поступающую информацию с электрических
5 величин в массовые показатели на экран с цифровыми индикаторами. Цифровые отметки массы фиксирует оператор транспортного средства.
Устройство функционирует следующим
0 образом.
Перёд началом взвешивания и транспортировки сельскохозяйственных животных оператор, управляя ручкой гидро.золотника раздельно-агрегатной гид5 росистемы транспортного средства 13, штоками силовых цилиндров 14 через балки 16 перемещают опорные колеса 10 в направлении рамы 8. Через кронштейн 19, оси 20, 2 Т, тягу 22 и кронштейн 23 прицеп 11 переме- .
0 щается в положение из-под рамы 8 в положение над рамой 8 таким образом, чтобы прицепная серьга 12 осталась на прежней высоте на прицепном крюке транспортного средства 13. Оператор, управляя второй
5 ручкой гидрозолотника раздельно-агрегатной гидросистемы транспортного средства 13, перемещает шток гидропривода 32 в максимально выдвинутое положение. При перемещении штока гидропривода 32 через..
0 палец 34 ротор поворачивается нз угол 90° вокруг вертикальной оси 31, Оси 35 размещенные на периферийной части ротора 30, через коуши 36 натягивают запасовзнные гибкие тяги 28, При повороте ротора 30, оси
5 35 удаляются от полых резьбовых осей 47, поворачиваются вилки 45 кронштейнов 46 флюгерных блоков 37, В этом случае ветви канатов 28 перекатываются вместе с блоками 38 на осях 50. При этом горизонтальные полки L-образных кронштейнов 27 приближаются к раме 8 и приподнимают платформу 1 над рамой 8. При натяжении гибких ветвей 28 нагрузка от массы грузовой платформы 1 передается на теНзометрические стержни 26. Нагрузка от массы платформы 1 на стержни 26 направлена всегда строго вертикально. Этому способствуют гибкие тяги 28 и шаровые втулки 42 в L-образном кронштейнах 27. Независимо от положения мобильной рамы 8 по отношению к горизонту, за счет трех гибких тяг 28 и шаровых втулок 42 платформы 1 по отношению к раме 8 находится в подвешенном положении, а тензометрические стержни 26 занимают строго вертикальное положение. Реакция от веса платформы 1 на стержни 26 распределяется пропорционально их положению относительно центра масс платформы 1, Тензорезисторные датчики 53 фиксируют деформацию тензометримеских стержней 26, а датчики 52 на них вносят корректуры температурных колебаний в измерительную цепь. Электрические сигналы с датчиков 52 и 53 усиливают тензоусилители. Выходной сигнал с усилителя блоков обработки информации преобразуется в цифровые отметки на световых индикаторах. Блок регистрации и обработки получает энергию От аккумуляторной батареи транспортного средства 13. Порожнюю массу платформы 1 с точностью до 0,1 кг оператор фиксирует в полевом журнале. Управляя гидроприводом 32, оператор механизмом 29 подъема платформы 1 разгружает тензометрические стержни 26.
Подсобные рабочие или животноводы открывают створки 5 и 6 между частями 7 и 8 заднего борта, Из загонок перегоняют жи-. вотных на грузовую платформу 1. При заполнении платформы 1 прицепной емкости, рабочие закрывают створки 5 и 6. Манипулируя ручкой гидрозолотника, оператор гидроприводом 32 вновь путем поворота ротора 30 вокруг вертикальной оси 34 поднимает через гибкие тяги 28 грузовую платформу 1 над мобильной рамой 8. В данный момент времени масса животных на платформе 1 передается на тензометрические стержни 26, которыми фиксируется вес животных. Независимо от положения животных на платформе 1, в неподвижном ли они положении или находятся в движении, суммарное показание на стержнях 26 остается неизменным. В рассмотренной конструкции измерительного механизма изменяется величина компонент в деформациях стержней 26, фиксируемых тензорезисторами 53. Однако их последовательное соединение в электрической цепи, причем в рабочее плечо полумостовой хемы. выполняет эту операцию автоматически без разрывов отметок во времени.
После взвешивания оператор гидроприводом 32 платформу 1 опускает на раму 8. Взвешивание массы животных оператор может производить как в напольном положении рамы 8, так и при ее переводе механизмом 9 с напольного положения при загрузке животных в полное транспортное
положение перед их транспортировкой.
Массу животных находят как разницу между показаниями блока переработки информации после взвешивания животных и весом порожней платформы.
Калибровку тёнзометрических стержней 26 осуществляют следующим образом. Для этого между основанием гидропривода 32 и кронштейном рамы 8 в месте их соединения с пальцем 33 размещают образцовый
динамометр класса 0,5 с ценой деления 5 кГс и пределами, измерений 0...5000 кГс.
В комплекте измерительного механизма имеются стержни 26 с пределами измерения масс 500, 1000 и 3000 кГс
соответственно с точностью измерений ±0,1 кГс, ±1,0 кГс, ±3,0 кГс.
Описанным устройством можно провести физиологические исследования, например потерю живого веса животных при их
транспортировке, в стрессовых ситуациях и ставить другие эксперименты.
Этим устройством можно определять биологическую массу урожая с опытных участков, норм вносимых доз минеральных
удобрений, семян и др.
Формула изобретения
1. Взвешивающее устройство на транспортном средстве, содержащее грузовою
платформу, прикреплённую к электрическим вспомогательным датчикам, связанным с гибкими элементами, подвецяэнными к мобильной раме, отличающееся тем, что, с целью повышения точности измерения массы незафиксированного ,перевози: мого животного, датчики выполнены в виде тёнзометрических вертикальных стержней, нижними концами шарнйрнО Закрепленных на кронштейнах грузовой платформы, а верхними прикрепленных к гибким тягам, которые связаны с механизмом подъема платформы, закрепленным на мобильной раме.
2. Устройство по п. 1, о т л и ч а ю щ ее- с я тем, что механизм подъема платформы выполнен в виде приводного ротора с вертикальной осью вращения, периферийные точки которого соединены указанными гибкими тягами, запасованными через блоки, закрепленные на мобильной раме.
7/7//// // / /// /TS /// ///
Фгг.3
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2079117C1 |
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| КОМПЛЕКС АВТОМАТИЧЕСКОЙ БОНИТИРОВКИ И ПЕРЕВЕСКИ ПТИЦЫ МЯСНЫХ И ЯИЧНЫХ ПОРОД "АГРОБИТ В" | 2023 |
|
RU2816483C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1992 |
|
RU2042118C1 |
| СПОСОБ ДОБЫЧИ КОРНЕЙ И КОРНЕВИЩ СОЛОДКИ, УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ НЕТОВАРНЫХ ЧАСТЕЙ КОРНЕЙ СОЛОДКИ, МАШИНА ДЛЯ ДОБЫЧИ КОРНЕЙ СОЛОДКИ, МАШИНА ДЛЯ УБОРКИ КОРНЕЙ РАСТЕНИЙ | 2000 |
|
RU2179384C1 |
| МАШИНА ДЛЯ УБОРКИ КОРНЕЙ РАСТЕНИЙ | 2007 |
|
RU2332829C1 |
| СТРЕЛОВОЙ САМОХОДНЫЙ КРАН | 2020 |
|
RU2738222C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2079118C1 |
| МОБИЛЬНАЯ УСТАНОВКА ДЛЯ РЕМОНТА СКВАЖИН | 2003 |
|
RU2262583C2 |
Использование: транспортное и сельскохозяйственное машиностроение, в частности для взвешивания и транспортировки сельскохозяйственных животных.и грузов, а также может быть использовано при проведении физиологических исследований и получения экспериментальных данных. Сущность изобретения: смонтированное на транспортном средстве взвешивающее устройство содержит грузовую платформу, подвешенную к мобильной раме посредством разнесенных в базовых точках электрических вспомогательных датчиков и гибких элементов. Датчики выполнены в виде тен- зометрических вертикальных стержней. Нижние крнцы датчиков шарнирно закреплены на кронштейнах грузовой платформы. Верхние концы датчиков прикреплены к гибким тягам, которые связаны с механизмом подъема платформы, закрепленной на мобильной раме. Механизм подъема платформы выполнен в виде приводного ротора с вертикальной осью вращения. Периферийные точки ротора соединены указанными гибкими тягами, запасованными через блоки, к базовым точкам на мобильной раме. 1 з.п. ф-лы, 7 ил,
Б- б
,{
к
| Заявка ФРГ №3501667, кл.С 01 G 19/12, 1985. |
