Изобретение относится к устройствам для взвешивания, сортировки и оценки птиц мясных и яичных пород по продуктивным качествам для увеличения их хозяйственной ценности.
Основным способом контроля роста птицы является регулярная перевеска. Наряду с перевеской для родительских стад птицы необходима регулярная бонитировка, то есть разделение птицы внутри корпуса содержания на несколько весовых групп, от самой легкой до самой тяжелой. Сегодня данные операции проводятся в ручном режиме, где птицевод взвешивает на напольных или подвесных весах птицу и после этого относит ее в соответствующую часть зала или клетку. Это снижает общую производительность труда, системно повышает вероятности неправильной оценки веса, несет в себе дополнительные биориски, травмоопасность и повышенный стресс для птицы.
Из уровня техники известно устройство для обработки, сортировки и вакцинации живых птиц (патент РФ на изобретение № 2723592, опубл. 16.06.2020), содержащее: основной элемент; принимающий элемент, прикрепленный с возможностью поворота к основному элементу и выполненный с возможностью приема и удерживания птицы за ее лопаточно-плечевой сустав в первом положении и высвобождения птицы во втором положении принимающего элемента, и запирающий элемент, прикрепленный с возможностью перемещения к основному элементу и выполненный с возможностью блокировки принимающего элемента в первом положении и разблокировки принимающего элемента для поворота принимающего элемента из его первого положения во второе положение для освобождения птицы. Недостатками устройства являются большие габариты, значительно больший вес (более 230 кг) и связанную с этими факторами низкую мобильность (перемещение в корпус содержания птицы и обратный вынос требуют разборки и последующей сборки устройства), а также наличие большого количества сложных механизмов по подвеске птицы (22 узла) и пневматики, что значительно снижает надежность эксплуатации и повышает затраты на поддержание рабочего состояния и ремонт. Кроме того, конструкция устройства подразумевает дополнительные манипуляции (навеска птицы), что увеличивает стресс и негативно влияет на качественные показатели продукции промышленного птицеводства.
Известна система взвешивания и сортировки птиц (патент CN 110146147 В, "Poultry online weighing and grading system and method", опубл. 15.12.2020), которая содержит кронштейн, приводную цепь, вращающееся устройство для взвешивания, подъемное кольцо и пневматическое устройство для сортировки. Вращающееся устройство для взвешивания содержит: комбинированный рычаг передачи силы, оборудование находится на основании вращающегося устройства для взвешивания, кольца рычага передачи силы каждой группы соединены, на другом конце этого рычага передачи силы установлено гироскопическое колесо. Гироскопическое колесо и датчик взвешивания установлены на вращающемся весовом устройстве и все элементы снабжены установочной гайкой на этом рычаге передачи силы. Установочная гайка на всех этих рычагах передачи силы имеет одинаковую окружность и снабжена дугообразной канавкой, соответствующей этой установочной гайке на верхней опорной перекладине вращающегося весового устройства. Установлен датчик размещен в пазе дугообразной канавки. Когда гироскопическое колесо подкатывается к центральной точке датчика взвешивания и опускается, этот датчик срабатывает на этой установочной гайке.
Известны электронные весы для взвешивания птицы (патент CN 207263277 U, "A kind of electronic scale weighed for poultry", опубл. 20.04.2018). Конструкция включает в себя опорную плиту основания, электронное устройство взвешивания, платформу для взвешивания, противоскользящую панель, соединительный стержень, панель управления, экран дисплея, кнопку управления. Опорная плита основания проходит через винтовое соединение с электронным весовым устройством, она встроена в верхнюю часть электронного весового устройства с весовой платформой. Весовая платформа соединена с противоскользящей панелью. Боковое устройство электронных весов соединено с соединительным стержнем, который оснащен панелью управления. Панель управления оснащена экраном дисплея и кнопкой управления. Электронное устройство взвешивания включает в себя датчик давления, соединительную пластину, прижимные стержни, прижимную планку, буферную пружину, пластину для передачи данных, установленную на верхняя часть датчика давления с соединительной пластиной. Благоприятный эффект для электронных весов для взвешивания домашней птицы заключается в том, что датчик давления и буферная пружина расположены в электронном устройстве взвешивания, это может предотвратить перевес и привести к аварийному выходу датчика из строя.
Известна весовая система для классификации птицы (патент CN 208303258 U, "Poultry is classified weighing system", опубл. 01.01.2019), содержащая трансмиссионную систему и дополнительно содержащая подвижную пластину, которая установлена на солнцезащитном козырьке вверху или внизу, подъемную платформу со стропом, средняя часть которой шарнирно соединена с солнцезащитным козырьком, а один конец закреплен восемью планками, и на стропе платформы предусмотрена ступенька, которая может быть заблокирована подвижной пластиной, и при перемещении подвижной пластины вверх происходит вращение платформы на стропах, а птица может соскальзывать с восьми перекладин. Также система содержит стержень, средняя часть которого шарнирно соединена с опорой пневмоцилиндра, а один конец является свободным. Шток поршня другого конца и цилиндра шарнирно соединен, и когда шток поршня поднят, свободный конец может подниматься по горизонтальной плоскости подвижной пластины, а вертикальная плоскость выходит за ступеньку стропы платформы. Система содержит электронные весы, подвеску направляющей рейки, верхняя часть которой размещена на электронных весах, направляющая рейка разделена на секцию взвешивания и неподвижную секцию. Неподвижная секция фиксируется стойкой, а секция взвешивания фиксируется только подвесом направляющей рейки и может перемещаться только вверх и вниз, и когда направляющее колесо перекатывается поперек секции взвешивания, вес птицы может быть показан на платформе весов.
Описанные устройства представляют из себя отдельные концепции и принципы взвешивания птицы и последующего ее методологического разделения по категориям, в том числе тушек птицы на убойном производстве, исходя из полученных онлайн данных, но не предусматривают сортировку птицы. Сутью указанных устройств является использование одной из вариаций принципов построения стационарного взвешивания, но не бонитировки птицы.
Известно устройство для транспортировки и отделения живых птиц (патент WO 2021099326 A1, "Assembly for transporting and separating living poultry birds", опубл. 27.05.2021), которое содержит: первый конвейер (10) для транспортировки домашней птицы, карусель (12), содержащую вращающуюся платформу (14), причем указанная карусель (12) выполнена с возможностью обеспечения во время вращения этой платформы (14) пространственного разделения птицы. Птицы вводятся на ее вход таким образом, чтобы выстраивать их в линию друг за другом. Устройство так же содержит эжектор (18) для выталкивания птиц, отделенных таким образом от карусели (12), на эвакуационный конвейер (19) и их выравнивания. Устройство содержит распределительное устройство (11) для приема указанных живых птиц с первого конвейера (10) и подачи их на карусель (12). Распределительное устройство (11) представляет собой наклонную направляющую для направления птиц вниз к указанной карусели (12). Распределительное устройство (11), размещенное под нижним концом первого конвейера (10), образует круговой сектор. Распределительное устройство имеет на своих боковых краях вертикальные направляющие стенки (13) для направления птиц к указанной карусели (12). Эжектор (18) содержит, по меньшей мере, одно устройство для выдувания газа, сконфигурированное для выталкивания живой птицы из карусели (12). Эжектор содержит выдувную головку, соединенную с баллоном для сжатого газа, и средства управления для последовательного выпуска сжатого газа из баллона таким образом, что выброс сжатого газа нагнетательной головкой и прохождение живой птицы мимо выходного отверстия карусели (12) по существу являются одновременными. Карусель (12) содержит вращающуюся платформу (14) кольцевой формы и транспортер (17) для извлечения, расположенный под вращающейся платформой (14) для приема птиц, покидающих эту платформу. Входной конвейер (10 и разгрузочный конвейер (19) представляют собой конвейеры с продольной осью для обеспечения линейного перемещения птиц по их поверхности.
Описанное устройство относится к иному классу и предназначено для сортировки цыплят на инкубаторе. Ширина транспортной линии и диаметр/высота узла сортировки однозначно не приспособлены для работы с молодой (500 гр - 2000 гр) и тем более взрослой птицей (более 2 кг, размеры такой птицы - 30 см диаметр и 50 см высота). Указанный в тексте описания принцип сортировки «выдуванием» недостаточен для взрослой птицы - ее просто не «сдуешь» с места, использование принципа «сдувания» скорее приведет к взлету птицы и тем самым к сходу ее с транспортной ленты, а само «выдувание» предполагает наличие компрессора и пневматики, что усложняет и утяжеляет устройство. Сам процесс сортировки предполагает использование ящиков, которые затем необходимо перемещать, что снижает производительность процесса. Кроме того, устройство является габаритным, а наличие множества деталей и сочленений усложняет его конструкцию и снижает надежность и долговечность устройства.
Задача, на решение которой направлено заявляемое изобретение, заключается в объединении операций «взвешивание» и «сортировка» в процессе бонитировки птиц мясных и яичных пород.
Технический результат заявляемого изобретения заключается в снижении временных ресурсов, затрачиваемых на бонитировку птиц, повышении производительности труда персонала птицефабрик, повышения точности перевески за счет отсутствия человеческого фактора, минимизации последствий стресс-факторов для птиц, содержащихся на птицефабриках, а также в снижении биорисков заражения бактериальными и вирусными инфекциями за счет уменьшения количества контактов «человек-птица» в промышленном птицеводстве.
Технический результат достигается комплексом автоматической бонитировки и перевески птицы мясных и яичных пород «Агробит В», содержащим открытый сверху корпус с установленной внутри весовой платформой, снабженной тензометрическими датчиками, связанными по каналу связи с электронным блоком управления, содержащим плату управления, подключенную к источнику питания, и дисплей. Корпус открыт снизу и приподнят на высоту, равную по меньшей мере максимально возможному росту птицы мясной и яичной породы. Внутри корпуса под весовой платформой установлена вертикальная разделительная перегородка, делящая его на две секции. Упомянутые тензометрические датчики закреплены под весовой платформой в количестве четырех так, чтобы на каждую секцию приходилось по два. Весовая платформа содержит установленный в ее плоскости поворотный механизм, концы которого зафиксированы в противоположных стенках корпуса, а ось вращения находится в одной плоскости с разделительной перегородкой и параллельна ее краю. Перпендикулярно разделительной перегородке установлена горизонтальная наклонная перегородка, минимальное расстояние до которой равно радиусу вращения весовой платформы. Наклонная перегородка содержит установленный в ее плоскости поворотный механизм, концы которого зафиксированы в противоположных стенках корпуса так, что ось вращения находится в плоскости, перпендикулярной плоскости разделительной перегородки. Внутри корпуса установлены датчик контроля уровня горизонта весовой платформы и датчик положения наклонной перегородки, связанные по каналу связи с электронным блоком управления. С каждой из сторон разделительной перегородки размещены по датчику вертикального уровня весовой платформы при повороте, взаимодействующие по каналам связи с электронным блоком управления. Электронный блок управления содержит силовую плату управления двигателями, соединенную с источником питания и с двигателями по каналу связи. Два двигателя, приводящие в движение весовую платформу и наклонную перегородку, размещены снаружи корпуса.
Поворотный механизм весовой платформы может состоять из вала, концы которого зафиксированы в стенках корпуса посредством шарнирных соединений шарового типа.
Поворотный механизм весовой платформы может представлять собой шарнирное соединение цилиндрического типа, при этом осью его вращения будет являться стержень, концы которого жестко зафиксированы в стенках корпуса.
Поворотный механизм наклонной перегородки может состоять из вала, концы которого зафиксированы в стенках корпуса посредством шарнирных соединений шарового типа.
Поворотный механизм наклонной перегородки может представлять собой шарнирное соединение цилиндрического типа, при этом осью его вращения будет являться стержень, концы которого жестко зафиксированы в стенках корпуса.
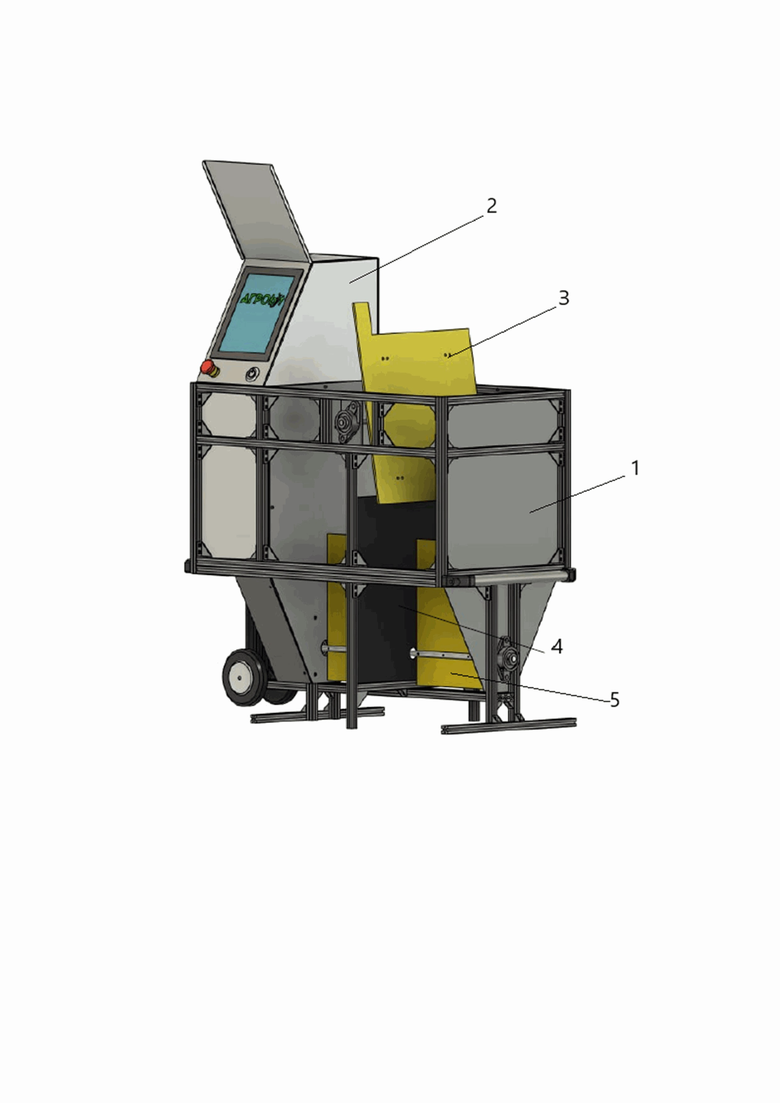
Внешний вид комплекса автоматической бонитировки и перевески представлен на чертеже. Цифрами обозначено следующее:
1 - корпус;
2 - электронный блок управления;
3 - весовая платформа;
4 - разделительная перегородка;
5 - наклонная перегородка.
Комплекс автоматической бонитировки и перевески птицы мясных и яичных пород «Агробит В» состоит из жесткого корпуса 1, в верхней части которого находится отверстие, служащее приемным оголовком, для помещения оператором через него внутрь корпуса 1 птицы.
Внутри корпуса 1 размещена плоская весовая платформа 3 предпочтительно прямоугольной формы, опирающаяся на несущую раму Н-образной формы так, что углы весовой платформы 3 совпадают с окончаниями несущей рамы. На нижней поверхности весовой платформы 3 по углам размещены четыре тензометрических датчика. Расположены тензометрические датчики таким образом, чтобы нагрузка на них распределялась равномерно. Количество тензометрических датчиков обусловлено и соответствует количеству точек крепления весовой платформы 3 к несущей раме. Весовая платформа 3 содержит установленный в ее плоскости в нейтральном положении поворотный механизм, концы которого зафиксированы в противоположных стенках корпуса 1, тем самым позволяя весовой платформе 3 осуществлять поворот «вправо/влево» (или «вперед/назад»). Несущая рама крепится к поворотному механизму (оси вращения) весовой платформы 3. Поворотный механизм весовой платформы 3 представляет из себя стержень, концы которого зафиксированы в стенках корпуса 1 посредством шарнирных соединений шарового типа. Также в качестве поворотного механизма весовой платформы 3 может быть использовано шарнирное соединение цилиндрического типа, при этом осью его вращения будет являться вал с жестко зафиксированными в стенках корпуса 1 концами. Внутри корпуса 1, на стенке верхней его части установлен датчик контроля уровня горизонта весовой платформы 3.
Под весовой платформой 3 вертикально размещена разделительная перегородка 4, разделяющая пространство внутри корпуса 1 на две секции, правую и левую (или переднюю и заднюю). Разделительная перегородка 4 установлена так, чтобы ось вращения весовой платформы 3 находилась в одной плоскости с ней и параллельна ее краю. Минимальное расстояние от входного отверстия корпуса 1 до разделительной перегородки 4 меньше радиуса вращения весовой платформы 3 на 30 миллиметров для ограничения самопроизвольного кругового движения весовой платформы 3 и для ее упора в процессе транспортировки без питания. Разделительная перегородка 4 закреплена на противоположных сторонах корпуса 1 любым из известных способов. Внутри корпуса 1 по обоим сторонам разделительной перегородки 4 в верхней ее части установлены два датчика вертикального уровня весовой платформы 3, определяющих достижение весовой платформой 3 крайнего положения при опрокидывании птицы влево или вправо (вперед или назад).
Перпендикулярно разделительной перегородке 4 в горизонтальной плоскости находится наклонная перегородка 5 для сортировки по направлению «вперед/назад» (или «вправо/влево»). Минимальное расстояние от оси вращения весовой платформы 3 до оси вращения наклонной перегородки 5 равно радиусу вращения весовой платформы 3. Наклонная перегородка 5 содержит установленный в ее плоскости поворотный механизм, концы которого зафиксированы в противоположных стенках корпуса 1 так, что ось вращения находится в плоскости, перпендикулярной плоскости разделительной перегородки 4, тем самым позволяя наклонной перегородке 5 осуществлять наклон «вперед/назад» (или «вправо/влево»). Поворотный механизм наклонной перегородки 5 может быть размещен под разделительной перегородкой 4 или проходить сквозь нее (в этом случае наклонная перегородка 5 будет разделена на два сегмента разделительной перегородкой 4). Поворотный механизм наклонной перегородки 5 представляет из себя стержень, концы которого зафиксированы в стенках корпуса 1 посредством шарнирных соединений шарового типа. Также в качестве поворотного механизма наклонной перегородки 5 может быть использовано шарнирное соединение цилиндрического типа, при этом осью его вращения будет являться вал с жестко зафиксированными в стенках корпуса 1 концами. Внутри корпуса 1, на одной из стенок нижней его части в зоне скольжения краев наклонной перегородки 5 установлен датчик положения наклонной перегородки 5.
Снаружи корпуса 1 размещены два двигателя, приводящие в движение весовую платформу 3 и наклонную перегородку 5. В качестве двигателей используются шаговые электромоторы с ременными приводами.
Снаружи корпуса 1 размещен электронный блок управления 2, состоящий из компьютера (например, промышленного), платы управления, силовой платы, двух драйверов электромоторов (по одному на каждый электромотор), дисплея (например, с сенсорным управлением), двух блоков питания, стабилизатора напряжения, а также модуля беспроводной связи, выхода цветовой индикации загрузки весовой платформы 3 и USB-выхода на панель управления для проводной передачи данных. Один блок питания соединен с платой управления, а другой блок питания - с силовой платой. На постоянное записывающее устройство, установленное на плате управления электронного блока управления 2, записано проприетарное программное обеспечение, позволяющее получать данные о взвешивании птицы, записывать их и формировать отчет с общим количеством, индивидуальным и общим весом птицы, коэффициентами вариации, среднеквадратичным отклонением и усредненностью, а также осуществлять хранение полученных данных. Через модуль беспородной связи или USB-выход пользователь может сохранять эти данные на внешнем устройстве для хранения, чтения и обработки. Тензометрические датчики соединены через экранированный монтажный гибкий теплостойкий кабель с платой управления, которая соединена с электронным блоком управления 2 через интерфейс UART. Также с платой управления соединены датчики контроля уровня горизонта и вертикального положения весовой платформы 3 и датчики положения наклонной перегородки 5.
Корпус 1 открыт снизу и приподнят на высоту, равную по меньшей мере максимально возможному росту птицы мясной и яичной породы. В целях обеспечения возможности удобной транспортировки комплекс является мобильным: он оборудован колесами (например, два) и ручками для переноски.
Питание оборудования производится от рабочей электросети, но при необходимости может осуществляться через использование электрогенератора. Описанная конструкция обладает номинальной производительностью до 2200 голов/час и диапазоном взвешивания 250-5000 грамм, при этом точность взвешивания 1%.
Работа комплекса осуществляется следующим образом. Под корпусом 1 предварительно устанавливают ширмы, например, из пластика или ткани, разделяющие пространство под корпусом 1 на 1, 2, 3 или 4 зоны в зависимости от технологической задачи и весовых категорий птиц, чей вес измеряется. Оператор осуществляет включение комплекса и стандартную сверку показаний весов с помощью калибровочного эталона веса, а также в окне управления комплексом на дисплее задает весовые лимиты каждой из весовых групп и направления сбрасывания каждой из весовых групп птиц. Затем оператор размещает птицу в приемный оголовок корпуса 1, на весовую платформу 3. Тензометрические датчики фиксируют вес птицы и передают сигнал на управляющую плату электронного блока управления 2 происходит автоматическое взвешивание одной головы птицы. Одновременно с этим в программном обеспечении электронного блока 2 происходит сравнение с целевыми показателями весовых категорий птицы и запись полученных данных. По результатам сравнения происходит выбор направления опрокидывания птицы в поперечной оси - в левый или правый отсек (или передний-задний), а также определяется выбор направления по продольной оси - вперед или назад (или вправо-влево). Плата управления подает сигналы через силовую плату на драйверы электродвигателей весовой платформы 3 и наклонной перегородки 5. Один электродвигатель приводит в движение вращающий механизм весовой платформы 3, а сама вращающаяся весовая платформа 3 поворачивается на 82 градуса вправо или влево (вперед или назад) в зависимости от весовой категории, которой принадлежит птица. Одновременно с этим плата управления подает сигнал об отклонении весовой платформы 3 (в диапазоне 45 градусов в каждом направлении, относительно перпендикулярному горизонту положению) в ту или иную сторону, и другой электродвигатель приводит в движение вал наклонной перегородки 5, а сама наклонная перегородка 5 наклоняется в зону, позволяющую направить птицу в зону сброса, соответствующую весовой группе, к которой относится птица. Птица соскальзывает под собственным весом внутри корпуса 1, сначала вправо или влево, а затем вперед или назад (вперед или назад, а затем вправо или влево), попадая в конечном итоге в огороженную заранее под корпусом 1 ширмами зону. Таким образом производится сортировка птицы по весовым показателям. О достижении весовой платформой 3 нижнего положения сигнализирует правый или левый (передний или задний) датчик вертикального уровня весовой платформы 3. Далее весовая платформа 3 возвращается в горизонтальное положение, а датчик уровня горизонта весовой платформы 3 передает сигнал на электронный блок управления 2 о готовности комплекса к размещению следующей птицы на весовой платформе 3. Одновременно датчик положения наклонной перегородки передает в электронный блок управления 2 сигнал о итоговом нахождении наклонной перегородки 5 - в позиции наклона к задней или к передней (левой или правой) стенке корпуса 1, что учитывается проприетарным программным обеспечением при следующем шаге взвешивания и сортировки. Программное обеспечение электронного блока управления 2 последовательно записывает полученные данные и предоставляет их в виде агрегированного отчета с общим количеством, индивидуальным и общим весом птицы, коэффициентами вариации, среднеквадратичного отклонения и усредненности. Полученные данные размещаются программным обеспечением в электронный архив для хранения на электронном блоке управления комплекса. Через модуль беспородной связи или USB-выход пользователь может сохранять эти данные на внешнем устройстве для хранения, чтения и обработки.
Применение комплекса автоматической бонитировки и перевески птицы мясных и яичных пород «АГРОБИТ В» позволяет управлять ростом и продуктивностью поголовья птицы в промышленных масштабах, а именно ускорить и объединить операции «взвешивание» и «перемещение», в результате чего производительность труда возрастает более чем в 2 раза с соответствующим уменьшением количества контактов «человек-птица» (из расчета, что стандартный состав бригады сортировки из 11-12 человек включает 5 весовщиц, 5 подающих и 1-2 загонщика, а использование заявляемого изобретения позволяет осуществлять сортировку равного объема птицы за такой же период времени (стандартная рабочая смена) бригадой сортировки количеством 5-6 человек в составе 1 оператора, 3-4 подающих и 1 загонщик), а также снизить общий уровень травматизма птицы за счет сокращения количества манипуляций и уменьшения высоты сброса птицы на пол по сравнению с ручным методом в 2-3 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЖИВОЙ МАССЫ И ЧИСЛЕННОСТИ ПОГОЛОВЬЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ЖИВОТНЫХ | 2015 |
|
RU2607348C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЧИСЛЕННОСТИ И ЖИВОЙ МАССЫ ПОГОЛОВЬЯ ЖИВОТНЫХ В СТАДЕ И ВЫЯВЛЕНИЯ СРЕДИ НИХ БОЛЬНЫХ И ОСЛАБЛЕННЫХ | 2015 |
|
RU2607347C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ ЖИВОЙ МАССЫ БРОЙЛЕРОВ ПО СТАДУ ПРИ ИХ НАПОЛЬНОМ СОДЕРЖАНИИ | 2012 |
|
RU2515382C2 |
| БЛОК-МУЛЬТИВАРКА | 2013 |
|
RU2565565C2 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| Передвижная измерительная автоматизированная установка поверки систем налива нефтепродуктов | 2022 |
|
RU2796227C1 |
| ВАГОННЫЕ ВЕСЫ | 2013 |
|
RU2561245C2 |
| Автоматическое устройство сбора, сортировки и переработки пластиковых и стеклянных бутылок | 2021 |
|
RU2770022C1 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| ВЕСЫ МЕДИЦИНСКИЕ ЭЛЕКТРОННЫЕ | 2007 |
|
RU2334954C1 |
Изобретение относится к устройствам для взвешивания, сортировки и оценки птиц мясных и яичных пород. Комплекс содержит открытый корпус с установленной внутри весовой платформой, снабженной четырьмя тензометрическими датчиками, связанными по каналу связи с электронным блоком управления, содержащим плату управления, подключенную к источнику питания, и дисплей. Корпус открыт снизу и приподнят на высоту. Внутри корпуса под весовой платформой установлена вертикальная разделительная перегородка, перпендикулярно которой установлена горизонтальная наклонная перегородка. Весовая платформа и наклонная перегородка содержат поворотные механизмы, зафиксированные в стенках корпуса. Снаружи корпуса размещены два двигателя, приводящие в движение весовую платформу и наклонную перегородку. Внутри корпуса установлены датчик контроля уровня горизонта весовой платформы и датчик положения наклонной перегородки, а с каждой из сторон разделительной перегородки размещены по датчику вертикального уровня весовой платформы при повороте. Электронный блок управления содержит силовую плату управления двигателями. Технический результат - повышение точности перевески, минимизация последствий стресс-факторов для птиц, снижение биорисков. 4 з.п. ф-лы, 1 ил.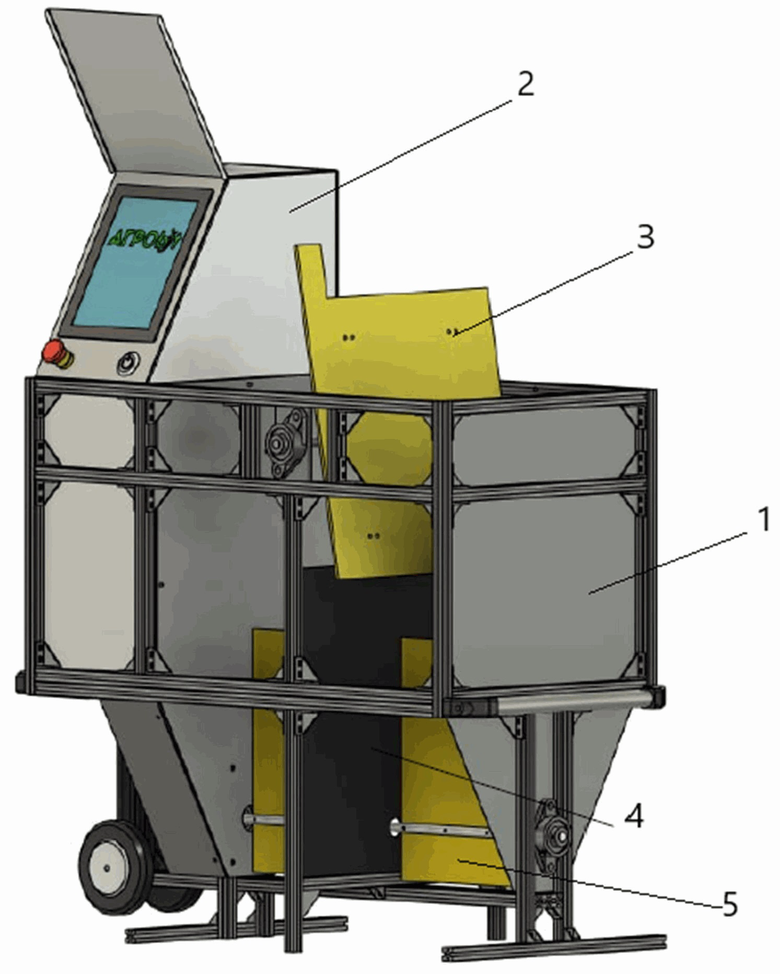
1. Комплекс автоматической бонитировки и перевески птицы мясных и яичных пород, содержащий открытый сверху корпус с установленной внутри весовой платформой, снабженной тензометрическими датчиками, связанными по каналу связи с электронным блоком управления, содержащим плату управления, подключенную к источнику питания, и дисплей, отличающийся тем, что корпус открыт снизу и приподнят на высоту, равную по меньшей мере максимально возможному росту птицы мясной и яичной породы, внутри корпуса под весовой платформой установлена вертикальная разделительная перегородка, делящая его на две секции, упомянутые тензометрические датчики закреплены под весовой платформой в количестве четырех так, чтобы на каждую секцию приходилось по два, весовая платформа содержит установленный в ее плоскости поворотный механизм, концы которого зафиксированы в противоположных стенках корпуса, а ось вращения находится в одной плоскости с разделительной перегородкой и параллельна ее краю, перпендикулярно разделительной перегородке установлена горизонтальная наклонная перегородка, минимальное расстояние до которой равно радиусу вращения весовой платформы, наклонная перегородка содержит установленный в ее плоскости поворотный механизм, концы которого зафиксированы в противоположных стенках корпуса так, что ось вращения находится в плоскости, перпендикулярной плоскости разделительной перегородки, снаружи корпуса размещены два двигателя, приводящие в движение весовую платформу и наклонную перегородку, внутри корпуса установлены датчик контроля уровня горизонта весовой платформы и датчик положения наклонной перегородки, связанные по каналу связи с электронным блоком управления, а с каждой из сторон разделительной перегородки размещены по датчику вертикального уровня весовой платформы при повороте, взаимодействующие по каналам связи с электронным блоком управления, при этом электронный блок управления содержит силовую плату управления двигателями, соединенную с источником питания и с двигателями по каналу связи.
2. Комплекс автоматической бонитировки и перевески птицы мясных и яичных пород по п. 1, отличающийся тем, что поворотный механизм состоит из стержня, концы которого зафиксированы в стенках корпуса посредством шарнирных соединений шарового типа.
3. Комплекс автоматической бонитировки и перевески птицы мясных и яичных пород по п. 1, отличающийся тем, что поворотный механизм представляет собой шарнирное соединение цилиндрического типа, при этом осью его вращения является стержень, концы которого жестко зафиксированы в стенках корпуса.
4. Комплекс автоматической бонитировки и перевески птицы мясных и яичных пород по п. 1, отличающийся тем, что поворотный механизм наклонной перегородки состоит из вала, концы которого зафиксированы в стенках корпуса посредством шарнирных соединений шарового типа.
5. Комплекс автоматической бонитировки и перевески птицы мясных и яичных пород по п. 1, отличающийся тем, что поворотный механизм наклонной перегородки представляет собой шарнирное соединение цилиндрического типа, при этом осью его вращения является стержень, концы которого жестко зафиксированы в стенках корпуса.
| WO 2021099326 A1, 27.05.2021 | |||
| Устройство для обнаружения пауз речи | 1984 |
|
SU1233290A1 |
| ПРОИЗВОДНЫЕ ИНДОЛА КАК ИНГИБИТОРЫ Н-РЕЦЕПТОРА ГИСТАМИНА ДЛЯ ЛЕЧЕНИЯ КОГНИТИВНЫХ РАССТРОЙСТВ И НАРУШЕНИЙ СНА, ОЖИРЕНИЯ И ДРУГИХ РАССТРОЙСТВ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2006 |
|
RU2423360C2 |
| CN 208303258 U, 01.01.2019 | |||
| CN 209485512 U, 11.10.2019 | |||
| Пневмораспылитель Л.И.Рабиновича | 1980 |
|
SU889125A1 |

