торые включаются в работу при помощи электромагнитов.
Ведомый вал представляет собой коленчатый вал, у которого кривошип разделен на две пары телескопических цилиндров, установленных на валу под углом 180° друг к другу. На штоках телескопических цилиндров установлена ось, на которую установлен ролик со свободным
вращением вокруг оси.
Кинематический вал с ведомым валом при помощи гибких шатунов (канатов). Канаты пропущены через ролик и закреплены на барабанах дифференциального ворота, представляют собой гибкую связь, образую- щую две петли, начало каждой петли начинается у противоположного торца одного из барабанов дифференциального ворота, а конец у противоположных торцов другого барабана.
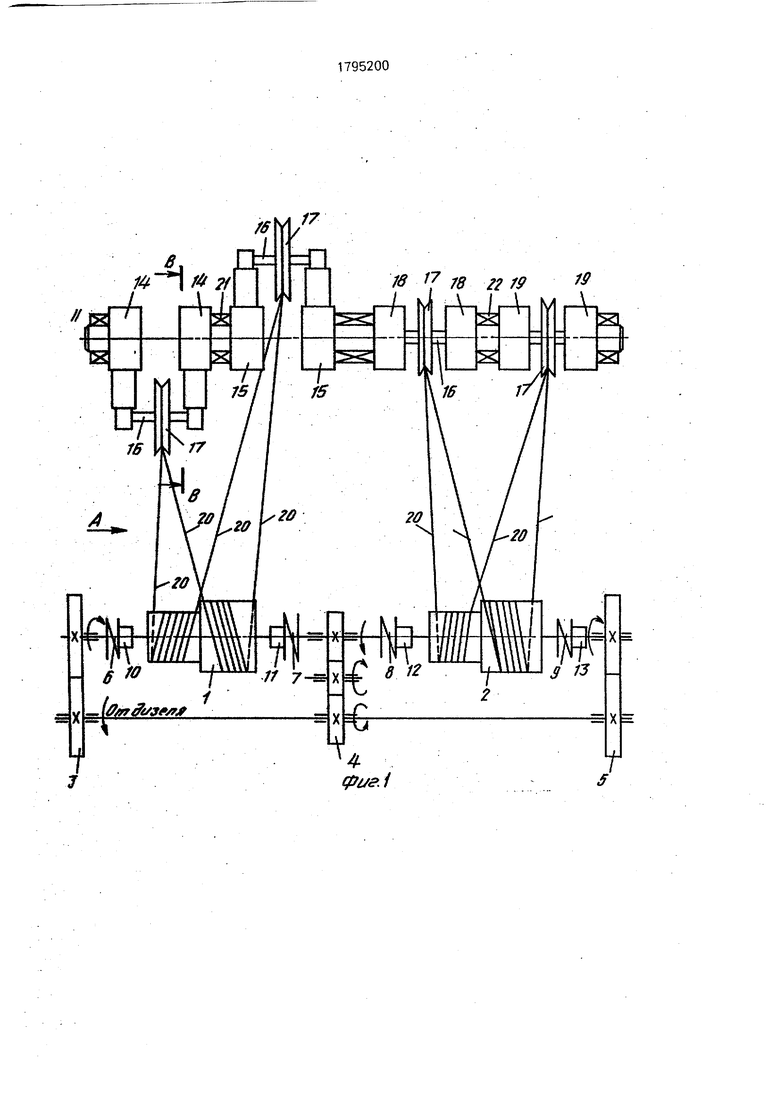
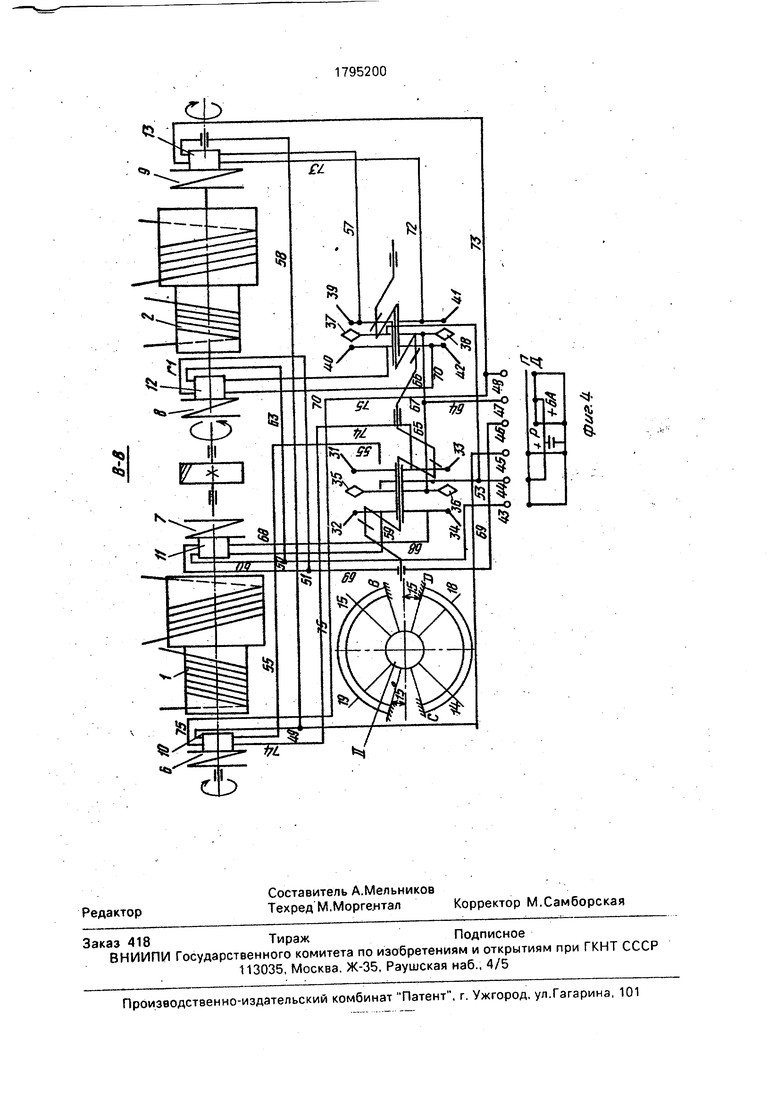
На фиг. 1 показано предлагаемое устройство, вид сверху; на Фиг. 2 - схемааааяж- ного механизма шатунов - канатов ; на фиг .3- схема установки переключателей реверсивного и очередного включения в работу дифференциальных воротов; на фиг. 4 - принципиальная схема включения и работы кривошипно-шатунного механизма с дифференциальным воротом.
Кривошипно-шатунный механизм с дифференциальным воротом состоит из ведущего вала 1, который получает вращение от двигателя при помощи редукторов 3,4,5. На валу 1 установлены два дифференциальных ворота 1,2, которые получают враще- ние через сцепные муфты 6, 7, 8, 9, включение которых производится при помощи электромагнитов 10, 11, 12, 13.
Ведомый вал 11 представляет собой ко
ленвал, где кривошип состоит из двух пар
телескопических цилиндров 14, 15 - 18, 19, насаженных на вал под углом 180° друг к другу в каждой паре, а пары расположены на валу друг к другу под 90°. На штоках телескопических цилиндров установлена ось 16, на которую поставлен ролик 17 со свободным вращением. Шатуны передачи выполнены гибкими (канаты 20).
Один дифференциальный ворот, одна пара кривошипов 14, 15 или 18, 19 соеди- ненные между собой гибким шатуном 20 представляют собой один кривошипно-ша- тунный механизм А.Н.Мельникова с дифференциальным воротом.
Для вывода одного кривошипно-шатун- ного механизма из мертвого положения в паре с ним устанавливается второй криво- шипно-шатунный механизм. Кривошипы которых расположены друг к другу под 90°.
0
5 0
5
0 5
0
5
0
5
Для натяжения во время работы гибких шатунов 20 установлен натяжной механизм (фиг.2). Первоначальную регулировку канатов производят при максимальном радиусе кривошипов 14-15 и 18-19 при горизонтальном по чертежу положении кривошипов.
Т.к. кривошипы выполнены телескопическими , а шатуны гибкими , то мы можем во время работы кривошипно-шатунного механизма с дифференциальным воротом плавно изменять радиус кривошипа, а значит .плавно изменять величину личиной выхода штоков телескопических цилиндров, на чертеже не показана.
Для обеспечения поочередности включения дифференциальных воротов и реверсивности передачи на коренных подшипниках 21-22, установлены переключатели направления вращения дифференциальных воротов (см,фиг.3), где неподвижные стойки для клемм 35, 36, 37, 38 самовозвращающихся контактов 31, 32. 33, 34, 39, 40, 41, 42. Самовозвращающиеся контакты установлены на подпружиненные сегменты (пружины на чертеже не показаны).
На фиг. 4 - схема включения работы и реверсивности кривошипно-шатунного механизма.
При положении кривошипов 14-15 и 18- 19 вид при положении рукоятки переключателя Р в положении П будут замкнуты клеммы переключателей 43,44,45 и ток пойдет от +БА, клемму 44, клеммы 53, 35 самовозвращающихся контактов 31, 32 и второй путь тока +БА, клемма 44, клемма 53, провод 54, на клемму самовозвращающих контактов 39, 40. В положении В-В кривошип 15 замкнет контакт 31 и ток по проводу 55 пойдет к электромагниту 10, включит его и по проводу 56 пойдет на клемму 45 переключателя реверсивности Р и на -БА .Электромагнит 10 сработав, включит сцепную муфту 6, которая соединит дифференциальный во- , рот 1 с валом двигателя и дифференциальный ворот 1 получит левое по чертежу вращение и через соответствующий гибкий шатун 20 приведет в правое по чертежу кривошипа 15, а с ним и вал 11 вращение.
В положении В-В кривошип 19 замкнет самовозвращающий контакт 39 с клеммой 37 и ток по проводу 57, через электромагнит 13,.ПРОВОД 58, клемму 49, провод 56, клемму. 45 переключателя реверсивности на -БА, при прохождении тока через электромагнит 13 он сработает и включит сцепную муфту 9, которая соединит дифференциальный ворот 2 с валом двигателя и дифференциальный ворот 2 получит левое вращение (по чертежу).
Дифференциальный ворот 2 через соответствующий гибкий шатун 20 даст правое движение кривошипу 19, а от него валу 11. Первым пройдет точку В кривошип 15 и разомкнется саморазмыкающий контакт 31 электромагнит 10 обесточится, муфта 6 отключится и разъединит дифференциальный ворот 1 от двигателя и начнется свободный выбег дифференциального ворота 1 перед включением на обратный ход. Кривошип 14, пройдя точку А замкнет самовозвращающий контакт 32 и ток через клемму 35, контакт 32, провод 59, электромагнит 11, провод 60, клемму 50, провод 61, клемму 43, переключателя реверсивности Р -БА. Элек- тромагнит 11 сработав, включит сцепную муфту 7 и дифференциальный ворот 1 получит правое вращение (почертежу )и через соответствующий гибкий шатун 20 сообщит правое движение кривошипу 14 и валу П, Кривошип 19 пройдет точку В и саморазмыкающий контакт 39 разомкнет цепь питания электромагнита 13 и дифференциальный ворот 2 будет разобщен с валом 1 двигателя.
Пара кривошипов 18, 19 будет прохо- дить зону .свободного выбега. При подходе к точке А кривошип 18 замкнет контакт 40 с клеммой 37 и ток от +БА через контакт 40, провод 62 электромагнит 12, провод 63, клемму 50, провод 61, клемму 43 переклю- чателя Р -БА, При проходе тока через электромагнит 12, он срабатывает и включает му фту 8, которая соединяет дифференциальный ворот 2с валом двигателя и дифференциальный ворот 2 получает правое вращение и через соответствующий гибкий шатун 20 передает правое движение кривошипу 18 и валу 11. После прохода кривошипом 18 от точки А 90°, к точке А пойдет кривошип 15 и цикл повторится.
При постановки в положение Л рукоятки переключателя реверсивности Р будут замкнуты клеммы 46, 47, 48 и ток пойдет от + БА через клемму 47 переключателя рР, провод 64, клемму 67, в первом случае, по проводу 65, клемму 36; во втором случае от клеммы 67, провод 64, клемму 38 контактов 42,41.
В положении вида Б-Б кривошип 14 замкнет контакт 34 и ток от клеммы 36, контакт 34, провод 68, электромагнит 11, провод 69, клемма 46, -БА. При проходе тока через электромагнит 11, он сработает и включит муфту 7, т.е. соединит вал двигателя с дифференциальным воротом 1, который получит правое вращение через соответствующий гибкий шатун 20, приведет в левое вращение кривошип 14 и вал 11,8 положении В-В кривошип 18 замкнет самовраща-- ющийся контакт 42 и ток от клеммы 38, контакт 42, провод 70, электромагнит 12, провод 71, клемма 51, провод 69. клемма 46, -БВ. При проходе тока через электромагнит 7 сработает и включит сцепную муфту 8, которая соединит вал двигателя с дифференциальным воротом 2, который получит правое вращение и через соответствующий гибкий шатун 20 даст кривошипу 18 и валу 11 левое вращение. При нижнем положении кривошипов 15, 19, будут соответственно замкнуты контакты 33, 41 и цикл будет повторяться в той же последовательности, что и при правом вращении вала 2. Только замыкание контактов 34, 33, 42, 41 будет проходить у точки С, а размыкание у точки Д, при подходе или отходе кривошипов у этих точек.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кнопочного управления электрическим подъемником | 1937 |
|
SU58580A1 |
| Станционный указатель отправления поездов | 1930 |
|
SU33183A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| Транспортное средство | 1989 |
|
SU1652115A1 |
| СТАНОК-КАЧАЛКА | 2009 |
|
RU2406874C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| Устройство для замыкания электрической цепи на регулируемый промежуток времени | 1935 |
|
SU48922A1 |
| ЭЛЕКТРИЧЕСКИЙ СТРЕЛОЧНЫЙ ПРИВОД С ВНУТРЕННИМ ЗАМЫКАНИЕМ ОСТРЯКОВ | 1931 |
|
SU33563A1 |
| КЛАВИШНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМИ ПОДЪЕМНИКАМИ МНОГОЭТАЖНЫХ ЗДАНИЙ | 1925 |
|
SU4235A1 |
| Механизм подачи канатно-цепной пилы | 1980 |
|
SU935613A1 |

Формулаизобретения Кривошипно-шатунный механизм с дифференциальным воротом, содержащий ведущий вал, ведомый, вал, имеющий, по крайней мере одну пару кривошипов, свя- .засную с ней , по крайней мере одну пару шатунов и передающее устройство, связывающее шатуны с ведущим валом, о т л и ч а- ю щ и и с я тем, что, с целью расширения эксплуатационных возможностей за счет бесступенчатого изменения крутящего момента, пара кривошипов выполнена в виде двух пар штоков, установленных с возможностью радиального перемещения с последующей фиксацией и расположенных под углом 180° друг к другу, двух осей, соединяющих каждая штоки соответствующих пар,
и двух роликов, установленных на осях с возможностью вращения, передающее устройство выполнено в виде, по крайней мере, одного дифференциального ворота, пара шатунов выполнена в виде бесконечной гибкой связи, охватывающей дифференциаль- .ный ворот и образующей две петли для взаимодействия с соответствующими роликами, начало каждой из которых расположено у противоположных торцов одного из барабанов дифференциального ворота, конец - у противоположных торцов другого, а механизм снабжен реверсивным устройством для периодического изменения направления вращения дифференциального ворота и ведомого вала.
