Изобретение относится к контрольно- измерительной технике и может быть использовано для контроля замыкания и размыкания коммутирующих элементов, преимущественно герконов в точках коммутации группы матричных соединителей по величине переходного сопротивления между контактами геркона.
В момент включения текущей точки коммутации матричного соединителя происходит автоматическое отключение предыдущей точки коммутации. При включении и отключении точек коммутации возникают переходные процессы, которые обуславливают введение некоторой задержки 13ад. на контроль состояния герконов в точках коммутации. Задержка г3ад. позволяет исключить ппияние переходных процессор на результаты контроля. В предлагаемом способе время задержки 1зяд. используется для включения одноименных течек коммутации группы матричных соединителей, что позволяет значительно повысить производительность контроля. Точки коммутации группы матричных соединителей при этом выбирают одноименными, т.е. имеющие одинаковый номер, и включают их последовательно с некоторой частотой, что также позволяет повысить производительность контроля за счет сокращения затрат времен и переключение коммутаторов горизонтальных и вертикальных цепей управ- ления в устройстве, реализующем предлагаемый способ. Частота включения одноименных точек коммутации группы матричных соединителей, с одной стороны, выбирают такой, чтобы за время задержки т.зад- включить точки коммутации возможной большего числа матричных соединителей, с другой стороны, частота включения точек коммутации ограничена длительностью импульсов тока управления, которая составляет по основанию примерно 1 мс. Производительность контроля предлагаемого способа находится в прямой зависимости от числа контролируемых матричных соединителей N. Число контролируемых матричных соединителей зависит от времени задержки т,3ад. и частоты включения одноименных точек коммутации. Эта зависимость выражается в следующей формуле:
М зад+ 1 РиЧзад 1, I и
где Тзад. - время задержки контроля состояния герконов относительно импульса тока управления.
Ти - период включения одноименных точек коммутации, 1
Ри j- I и
частота включения одноименных точек коммутации.
Из формулы следует, что число контролируемых матричных соединителей увеличивается с ростом частоты включения одноименных точек коммутации Ри, следовательно, производительность контроля предлагаемого способа увеличивается с ростом частоты включения одноименных точек коммутации.
Минимальное значение частоты включения одноименных точек коммутации, при котором еще имеется рост производиюль ности контроля предлагаемою способа, определяют из формулы:
F 1 1
г игЫл т i
I игтнп эад
Таким образом, для повышении производительности контроля необходимо,чтобы
частота включения и отключения одноименных точек коммутации группы матричных соединителей превышала частоту включения точек коммутации в каждом соединителе.
После включения одноименных точек коммутации группы матричных соединителей и по истечении времени задержки 13ад относительно момента подачи управляющего импульса контролируют замыкание герконов во включенной точке коммутации и размыкание герконов в отключенных точках коммутации сначала первого матричного соединителя, т.к, у него первым включают точку коммутации и на нем раньше всех
заканчиваются переходные процессы. Следующим контролируют состояние герконов во всех точках коммутации того матричного соединителя, у которого включают одноименную точку коммутации во вторую очередь, с учетом времени задержки т,3зд. относительно соответствующего импульса тока управления. Далее контролируют состояние герконов в точках коммутации остальных матричных соединителей в порядке
включения одноименных точек коммутации.
Такой порядок контроля группы матричных соединителей позволяет минимизировать время контроля и тем самым повышает производительность контроля предлагаемого
способа. В общем случае производительность контроля повышается в N раз.
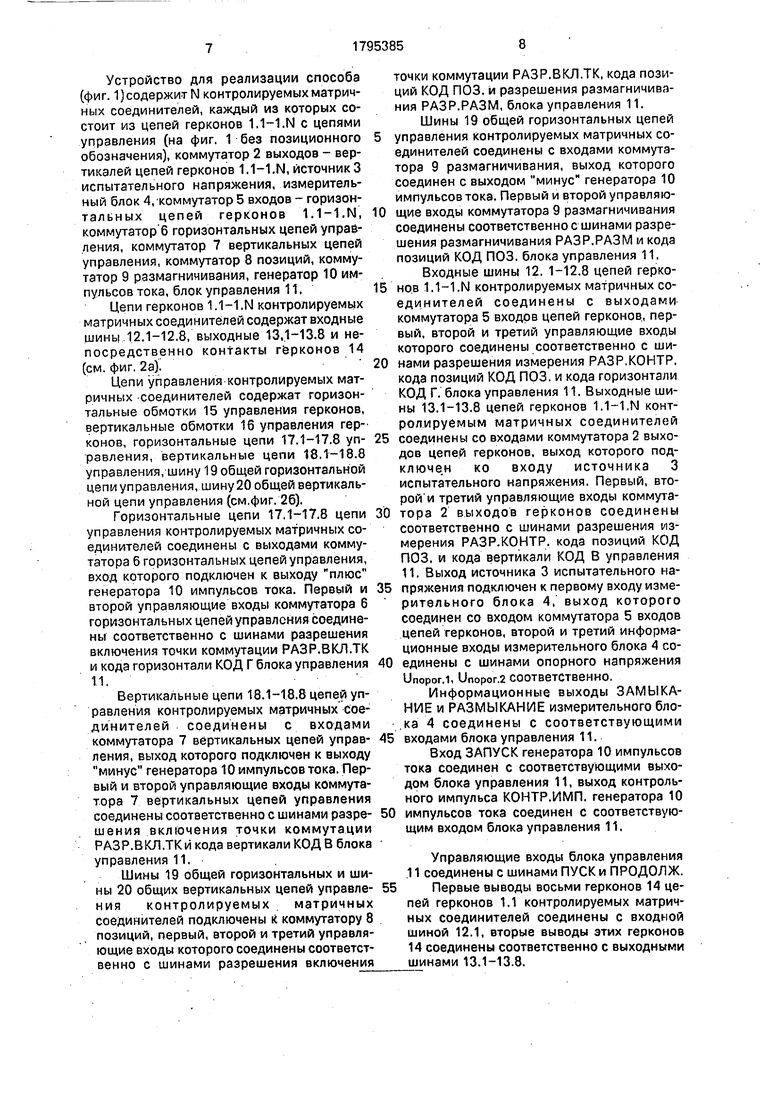
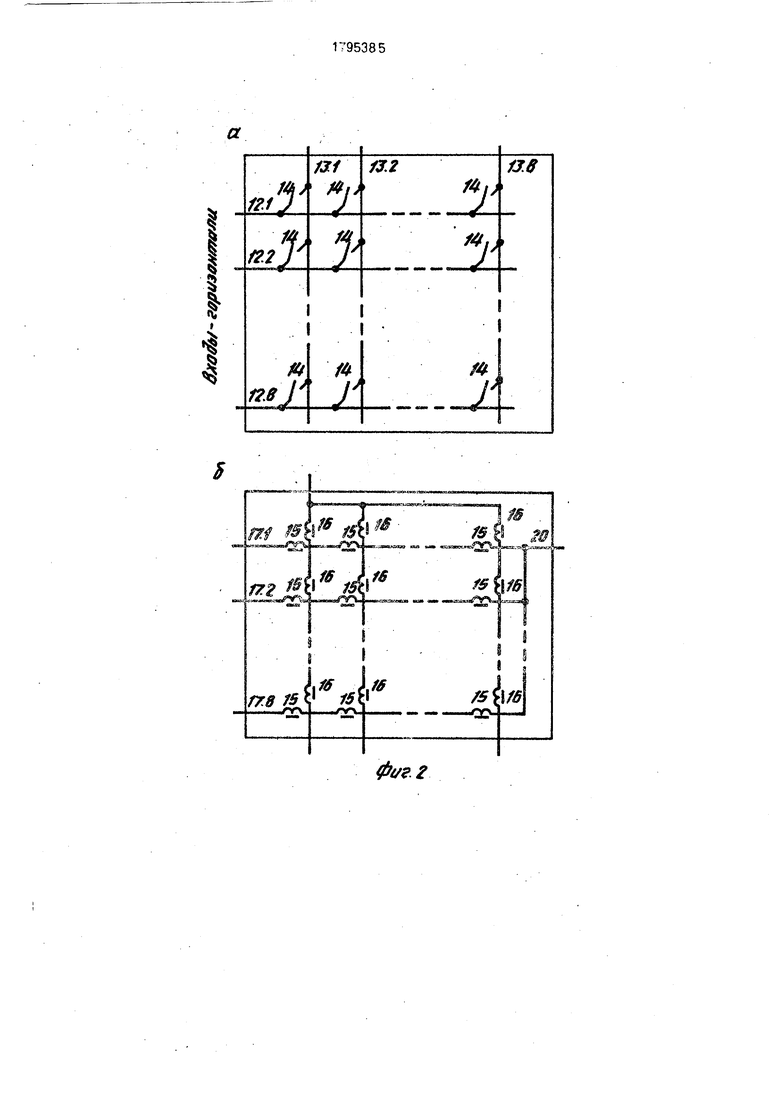
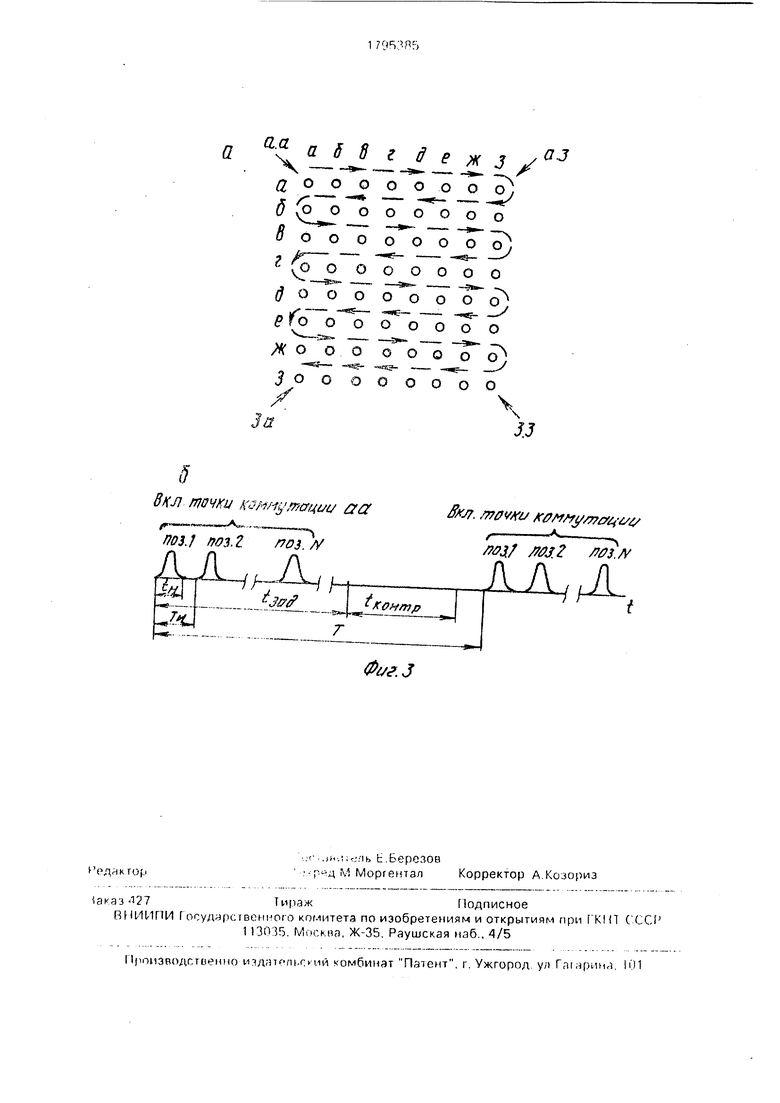
На фиг. 1 приведена структурная схема устройства, реализующего предлагаемый способ контроля группы матричных соединителей, имеющих коммутационную матрицу форматом 8x8 с 64 точками коммутации; на фиг. 2а - цепи герконов матричного соединителя, на фиг. 26 - цепи управления мат- ричного соединителя, на фиг. За направление обхода точек коммутации при их включении и контроле, на фиг. 36 - временная диаграмма, поясняющая предлагаемый способ контроля группы матричных соединителей. Рассмотрим способ контроля 10 мат ричных соединителей, имеющих 8 входов - горизонталей и 3 выходов - вертикалей, т.е. 64 точки коммутации (см.фиг. 3). В исходном состоянии все точки коммутации матричных соединителей разомкнуты. Сначала включают точку коммутации а.а. первого матрично- г о с оединителя Для .мог о ч о р е з его соответствующую гори.нппллкную цепь управления и соответствующую ргршкгнн ную
цепь управления пропускают колокообраз- ный импульс тока амплитудой 8 А и длительностью 1,2 мс от специального генератора. При этом геркон в точке коммутации а.а, соединяющий первую горизонталь и первую вертикально первого матричного соединителя, замыкается с магнитной блокировкой. Через 4 мс генератор вырабатывает следующий импульс тока, .который аналогичным образом включают одноименную точку коммутации а.а, второго матричного соединителя, Аналогичным образом с частотой Ри 250 Гц, превышающей частоту включения точек коммутации в каждом соединителе, которая устанавливается равной Ри 3 Гц включают одноименные точки коммутации а.а. остальных матричных соединителей.
Через время задержки 3ад. 40 мс относительно включения точки коммутации а.а. первого матричного соединителя, контролируют замыкание геркона в точке коммутации а.а. и размыкание герконов в остальных точках коммутации первого матричного соединителя. Время задержки Тзад 40 мс необходимо для исключения влияния переходных процессов на результат контроля,
Геркон во включенной точке коммутации а.а. считается замкнутым если переходное сопротивление его контактов г 1 Ом, а геркон в отключенной точке коммутации считается разомкнутым, если переходное сопротивление его контактов R : 2кОм.
Если переходное сопротивление контактов геркона во включенной точке коммутации а,а, г 1 Ом и(или) переходное сопротивление контактов герконов в отключенных точках коммутации R 2 кОм, то матричный соединитель считают неисправным,, фиксируют при этом координаты неисправного геркона, т.е. номер горизонтали и номер вертикали, между которыми он включен, характер неисправности, т.е. г 1 Ом и(или) R 2 кОм, а также номер неисправного матричного соединителя. Время контроля состояния герконов во всех точках коммутации одного матричного соединителя составляет примерно 2 мс. Порядок контроля состояния герконов в точках коммутации матричного соединителя приведен на фиг. За. После того, как все точки коммутации первого матричного соединителя будут проконтролированы, через время задержки т.эад S 40 мс относительно включения точки коммутации а.а. второго матричного соединителя контролируют состояние герконов во всех точках коммутации аналогичным образом. Порядок контроля состояния герконов во всех точках коммутации остальных матричных соединителей соответствует порядку включения одноименных точек коммутации. 5Во время контроля состояния герконов 10 матричных соединителей после включения точки коммутации а.а равно примерно 40 мс. После контроля состояния герконов во всех точках девяти матричных соедините
лей время Ти
1
Т
333 мс относительно
включения точки коммутации а.а. первого матричного соединителя, где Ри 3 Гц - частота включения точки коммутации в мат15 ричном соединителе, включают точку коммутации а.б. первого матричного соединителя. Импульс тока при этом пропускают через соответствующую горизонтальную цепь управления и соответствующую
0 горизонтальную цепь управления и соответствующую вертикальную цепь управления. Геркон, подключенный между первой горизонталью и второй вертикалью, замыкается с магнитной блокировкой. Геркон в ранее
5 включенной точке коммутации а.а. первого матричного соединителя при этом автоматически размыкается. Затем включают одноименные точки коммутации а.б. других матричных соединителей. Порядок и часто0 та включения такие же, как при включении точки коммутации.
После включения точки коммутации а.б. всех десяти матричных соединителей вновь контролируют состояние герконов во всех
5 .точках коммутации у всех матричных соединителей.
Принцип и порядок контроля состояния герконов в каждом матричном соединителе, а также в разных матричных соединителях
0 полностью аналогичен вышеописанному.
Порядок включения точек коммутации и контроля состояния герконов в матричном соединителе приведен на фиг. За.
После включения последней точки ком5 мутации з.а. всех матричных соединителей и контроля состояния герконов во всех точках коммутации приступают к ее отключению с этой целью, чтобы после контроля в матричных соединителях не осталось замк0 нутых герконов.
Заканчивают контроль проверкой отсутствия замкнутых герконов во всех точках коммутации матричных соединителей, которая аналогична проверке состояния герко5 нов после включения и отключения других точек коммутации.
Общее время контроля десяти матричных соединителей составляет примерно 21 с.
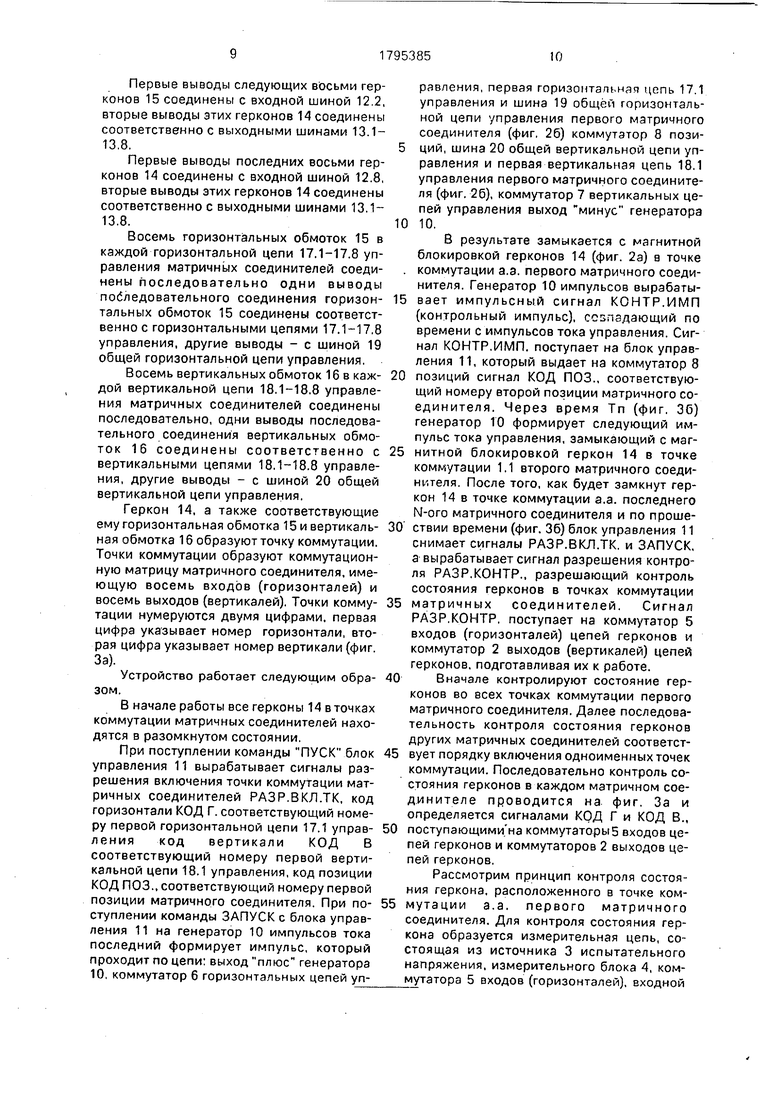
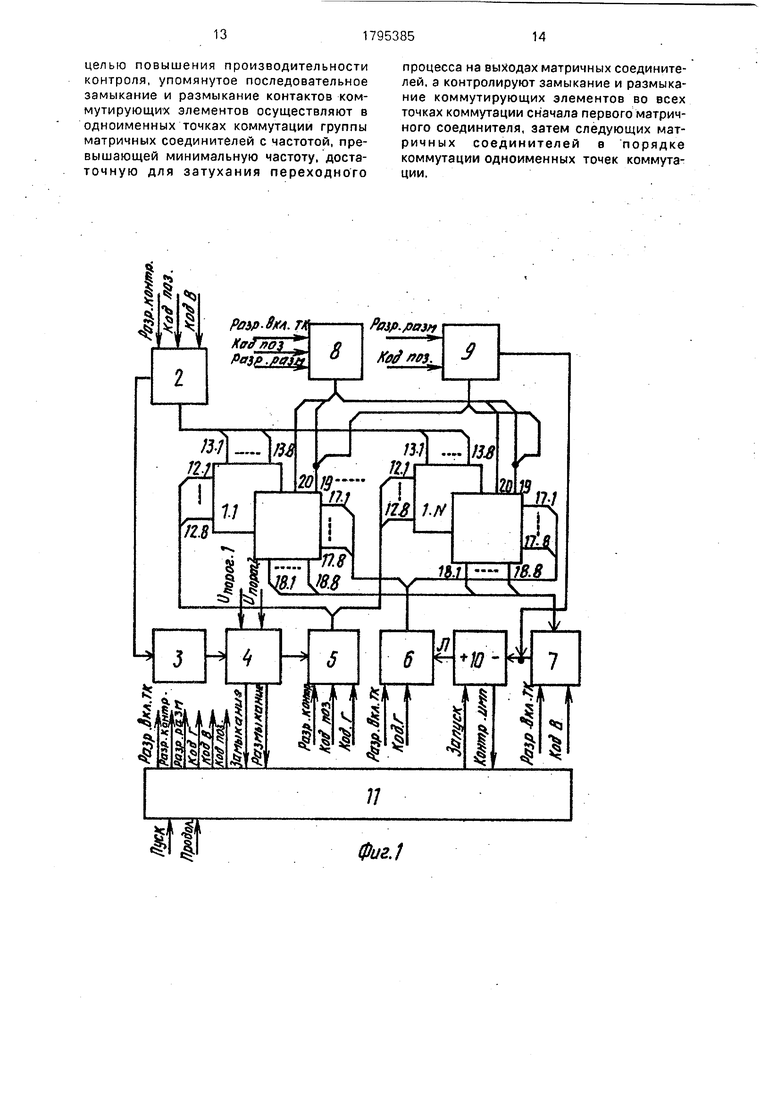
Устройство для реализации способа (фиг. 1) содержит N контролируемых матричных соединителей, каждый из которых состоит из цепей герконов 1.1-1.N с цепями управления (на фиг. 1 без позиционного обозначения), коммутатор 2 выходов - вертикалей цепей герконов 1.1-1.N, источник 3 испытательного напряжения, измерительный блок 4, коммутатор 5 входов - горизон- тальных цепей герконов 1.1-1.N, коммутатор 6 горизонтальных цепей управления, коммутатор 7 вертикальных цепей управления, коммутатор 8 позиций, коммутатор 9 размагничивания, генератор 10 импульсов тока, блок управления 11.
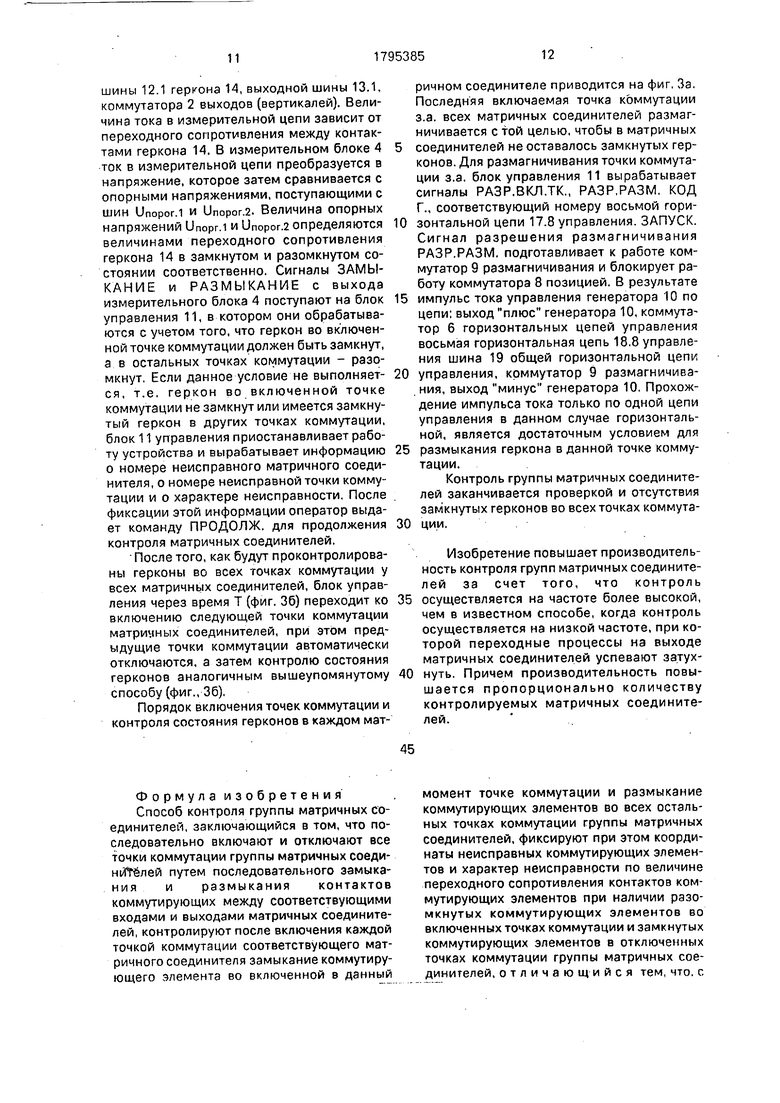
Цепи герконов 1.1-1.N контролируемых матричных соединителей содержат входные шины,1.2.1-12.8, выходные 13,1-13.8 и непосредственно контакты герконов 14 (см. фиг. 2а).
Цепи управления контролируемых матричных соединителей содержат горизонтальные обмотки 15 управления герконов, вертикальные обмотки 16 управления rep- конов, горизонтальные цепи 17.1-17.8 управления, вертикальные цепи 18.1-18.8 управления, шину 19 общей горизонтальной цепи управления, шину 20 общей вертикальной цепи управления (см,фиг. 26).
Горизонтальные цепи 17.1-17.8 цепи управления контролируемых матричных соединителей соединены с выходами коммутатора 6 горизонтальных цепей управления, вход которого подключен к выходу плюс генератора 10 импульсов тока. Первый и второй управляющие входы коммутатора 6 горизонтальных цепей управления соединены соответственно с шинами разрешения включения точки коммутации РАЗР.ВКЛ.ТК и кода горизонтали КОД Г блока управления 11.
Вертикальные цепи 18.1-1.8.8 цепей управления контролируемых матричных соединителей соединены с входами коммутатора 7 вертикальных цепей управления, выход которого подключен к выходу минус генератора 10 импульсов тока. Первый и второй управляющие входы коммутатора 7. вертикальных цепей управления соединены соответственно с шинами разре- шения включения точки коммутации РАЗР.ВКЛ.ТКй кода вертикали КОД В блока управления 11.
Шины 19 общей горизонтальных и шины 20 общих вертикальных цепей управления контролируемых матричных соединителей подключены к коммутатору 8 позиций, первый, второй и третий управляющие входы которого соединены соответственно с шинами разрешения включения
точки коммутации РАЗР.ВКЛ.ТК, кода позиций КОД ПОЗ. и разрешения размагничивания РАЗР.РАЗМ, блока управления 11. Шины 19 общей горизонтальных цепей
управления контролируемых матричных соединителей соединены с входами коммутатора 9 размагничивания, выход которого соединен с выходом минус генератора 10 импульсов тока. Первый и второй управляющие входы коммутатора 9 размагничивания соединены соответственно с шинами разрешения размагничивания РАЗР.РАЗМ и кода позиций КОД ПОЗ. блока управления 11. Входные шины 12. 1-12.8 цепей герконов 1.1-1.N контролируемых матричных соединителей соединены с выходами коммутатора 5 входов цепей герконов, первый, второй и третий управляющие входы которого соединены соответственно с шинами разрешения измерения РАЗР.КОНТР, кода позиций КОД ПОЗ. и кода горизонтали КОД Г. блока управления 11. Выходные шины 13.1-13.8 цепей герконов 1.1-1.N контролируемым матричных соединителей
соединены со входами коммутатора 2 выходов цепей герконов, выход которого подключен ко входу источника 3 испытательного напряжения. Первый, второй и третий управляющие входы коммутатора 2 выходов герконов соединены соответственно с шинами разрешения измерения РАЗР.КОНТР. кода позиций КОД ПОЗ, и кода вертикали КОД В управления 11. Выход источника 3 испытательного напряжения подключен к первому входу измерительного блока 4, выход которого соединен со входом коммутатора 5 входов цепей герконов, второй и третий информационные входы измерительного блока 4 соединены с шинами опорного напряжения Unopor.1, Unopor.2 соответственно.
Информационные выходы ЗАМЫКАНИЕ и РАЗМЫКАНИЕ измерительного бло- .ка 4 соединены с соответствующими
входами блока управления 11.
Вход ЗАПУСК генератора 10 импульсов тока соединен с соответствующими выходом блока управления 11, выход контрольного импульса КОНТР.ИМП. генератора 10
импульсов тока соединен с соответствующим входом блока управления 11.
Управляющие входы блока управления .11 соединены с шинами ПУСК и ПРОДОЛ Ж. Первые выводы восьми герконов 14 цепей герконов 1.1 контролируемых матричных соединителей соединены с входной шиной 12.1, вторые выводы этих герконов 14 соединены соответственно с выходными шинами 13.1-13.8.
Первые выводы следующих восьми гер- конов 15 соединены с входной шиной 12.2, вторые выводы этих герконов 14 соединены соответственно с выходными шинами 13.1- 13.8.
Первые выводы последних восьми герконов 14 соединены с входной шиной 12.8, вторые выводы этих герконов 14 соединены соответственно с выходными шинами 13.1- 13.8.
Восемь горизонтальных обмоток 15 в каждой горизонтальной цепи 17.1-17.8 управления матричных соединителей соединены последовательно одни выводы последовательного соединения горизонтальных обмоток 15 соединены соответственно с горизонтальными цепями 17.1-17.8 управления, другие выводы - с шиной 19 общей горизонтальной цепи управления.
Восемь вертикальных обмоток 16 в каждой вертикальной цепи 18.1-18.8 управления матричных соединителей соединены последовательно, одни выводы последовательного соединения вертикальных обмоток 16 соединены соответственно с вертикальными цепями 18.1-18.8 управления, другие выводы - с шиной 20 общей вертикальной цепи управления.
Геркон 14, а также соответствующие ему горизонтальная обмотка 15 и вертикальная обмотка 16 образуют точку коммутации. Точки коммутации образуют коммутационную матрицу матричного соединителя, имеющую восемь входов (горизонталей) и восемь выходов (вертикалей). Точки коммутации нумеруются двумя цифрами, первая цифра указывает номер горизонтали, вторая цифра указывает номер вертикали (фиг. За).
Устройство работает следующим образом.
В начале работы все герконы 14 в точках коммутации матричных соединителей находятся в разомкнутом состоянии.
При поступлении команды ПУСК блок управления 11 вырабатывает сигналы разрешения включения точки коммутации матричных соединителей РАЗР.ВКЛ.ТК, код горизонтали КОД Г. соответствующий номеру первой горизонтальной цепи 17.1 управления код вертикали КОД В соответствующий номеру первой вертикальной цепи 18.1 управления, код позиции КОД ПОЗ., соответствующий номеру первой позиции матричного соединителя. При поступлении команды ЗАПУСК с блока управления 11 на генератор 10 импульсов тока последний формирует импульс, который проходит по цепи: выход плюс генератора 10, коммутатор 6 горизонтальных цепей управления, первая горизонтальная цепь 17.1 управления и шина 19 общей горизонтальной цепи управления первого матричного соединителя (фиг. 26) коммутатор 8 пози- 5 ций, шина 20 общей вертикальной цепи управления и первая вертикальная цепь 18.1 управления первого матричного соединителя (фиг. 26), коммутатор 7 вертикальных цепей управления выход минус генератора 0 10.
В результате замыкается с магнитной блокировкой герконов 14 (фиг. 2а) в точке . коммутации а.а. первого матричного соединителя. Генератор 10 импульсов вырабаты- 5 вает импульсный сигнал КОНТР.ИМП (контрольный импульс), ссзпздающий по времени с импульсов тока управления. Сигнал КОНТР.ИМП. поступает на блок управления 11, который выдает на коммутатор 8
0 позиций сигнал КОД ПОЗ., соответствующий номеру второй позиции матричного соединителя. Через время Тп (фиг. 36) генератор ТО формирует следующий импульс тока управления, замыкающий с маг5 нитной блокировкой геркон 14 в точке коммутации 1.1 второго матричного соединителя. После того, как будет замкнут геркон 14 в точке коммутации а.а. последнего N-ого матричного соединителя и по проше0 ствии времени (фиг. 36) блок управления 11 снимает сигналы РАЗР.ВКЛ.ТК. и ЗАПУСК, а вырабатывает сигнал разрешения контроля РАЗР.КОНТР., разрешающий контроль состояния герконов в точках коммутации
5 матричных соединителей. Сигнал РАЗР.КОНТР, поступает на коммутатор 5 входов (горизонталей) цепей герконов и коммутатор 2 выходов (вертикалей) цепей герконов, подготавливая их к работе.
0Вначале контролируют состояние герконов во всех точках коммутации первого матричного соединителя. Далее последовательность контроля состояния герконов других матричных соединителей соответст5 вует порядку включения одноименных точек коммутации. Последовательно контроль состояния герконов в каждом матричном соединителе проводится на фиг. За и определяется сигналами КОД Г и КОД В.,
0 поступающими на коммутаторы 5 входов цепей герконов и коммутаторов 2 выходов цепей герконов.
Рассмотрим принцип контроля состояния геркона, расположенного в точке ком5 мутации а.а. первого матричного соединителя. Для контроля состояния геркона образуется измерительная цепь, состоящая из источника 3 испытательного напряжения, измерительного блока 4, ком- мутатора 5 входов (горизонталей), входной
шины 12.1 геркона 14, выходной шины 13.1, коммутатора 2 выходов (вертикалей). Величина тока в измерительной цепи зависит от переходного сопротивления между контактами геркона 14. В измерительном блоке 4 ток в измерительной цепи преобразуется в напряжение, которое затем сравнивается с опорными напряжениями, поступающими с шин Unopor.1 и Unopor.2. Величина опорных напряжений Unopr.1 и Unopor.2 определяются величинами переходного сопротивления геркона 14 в замкнутом и разомкнутом состоянии соответственно. Сигналы ЗАМЫКАНИЕ и РАЗМЫКАНИЕ с выхода измерительного блока 4 поступают на блок управления 11, в котором они обрабатываются с учетом того, что геркон во включенной точке коммутации должен быть замкнут, а в остальных точках коммутации - разомкнут. Если данное условие не выполняется, т.е. геркон во включенной точке коммутации не замкнут или имеется замкнутый геркон в других точках коммутации, блок 11 управления приостанавливает работу устройства и вырабатывает информацию о номере неисправного матричного соединителя, о номере неисправной точки коммутации и о характере неисправности. После фиксации этой информации оператор выдает команду ПРОДОЛЖ, для продолжения контроля матричных соединителей.
После того, как будут проконтролированы герконы во всех точках коммутации у всех матричных соединителей, блок управления через время Т (фиг. 36) переходит ко включению следующей точки коммутации матричных соединителей, при этом предыдущие точки коммутации автоматически отключаются, а затем контролю состояния герконов аналогичным вышеупомянутому способу (фиг., 36).
Порядок включения точек коммутации и контроля состояния герконов в каждом матричном соединителе приводится на фиг, За. Последняя включаемая точка коммутации з.а. всех матричных соединителей размагничивается с той целью, чтобы в матричных
соединителей не оставалось замкнутых герконов. Для размагничивания точки коммутации з.а, блок управления 11 вырабатывает сигналы РАЗР.ВКЛ.ТК., РАЗР.РАЗМ, КОД Г., соответствующий номеру восьмой горизонтальной цепи 17.8 управления. ЗАПУСК. Сигнал разрешения размагничивания РАЗР.РАЗМ. подготавливает к работе коммутатор 9 размагничивания и блокирует работу коммутатора 8 позицией, В результате
импульс тока управления генератора 10 по цепи: выход плюс генератора 10, коммутатор 6 горизонтальных цепей управления восьмая горизонтальная цепь 18.8 управления шина 19 общей горизонтальной цепи
управления, коммутатор 9 размагничивания, выход минус генератора 10. Прохождение импульса тока только по одной цепи управления в данном случае горизонтальной, является достаточным условием для
размыкания геркона в данной точке коммутации.
Контроль группы матричных соединителей заканчивается проверкой и отсутствия замкнутых герконов во всех точках коммутации.
Изобретение повышает производительность контроля групп матричных соедините- лей за счет того, что контроль
осуществляется на частоте более высокой, чем в известном способе, когда контроль осуществляется на низкой частоте, при которой переходные процессы на выходе матричных соединителей успевают затухнуть. Причем производительность повышается пропорционально количеству контролируемых матричных соединителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для проверки матриц коммутации | 1983 |
|
SU1141986A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ МОНТАЖА, ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ И ДИАГНОСТИКИ НЕИСПРАВНОСТЕЙ СЛОЖНЫХ УСТРОЙСТВ ЭЛЕКТРОАППАРАТУРЫ И ТОКОРАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ | 2008 |
|
RU2377585C1 |
| Матричный коммутатор на запоминающих герконах | 1983 |
|
SU1128269A1 |
| Устройство для контроля электрических цепей | 1983 |
|
SU1112322A1 |
| Устройство для контроля монтажных схем | 1988 |
|
SU1571619A1 |
| Многопостовое устройство для контроля параметров электронных схем | 1983 |
|
SU1108374A1 |
| Устройство для контроля величины сопротивления изоляции электрического монтажа | 1980 |
|
SU879516A1 |
| Устройство для контроля монтажных схем | 1980 |
|
SU920747A1 |
| Устройство для контроля электрического монтажа электрожгутов | 2023 |
|
RU2819713C1 |
| Устройство управления ферритовыми фазовращателями модульной фазированной антенной решетки | 2018 |
|
RU2698957C1 |
Изобретение относится к контрольно- измерительной технике и может быть использовано в устройствах для контроля коммутирующих элементов группы матричных соединителей, например герконов, по величине переходного процесса между контактами геркона. Целью изобретения является повышение производительности контроля. Способ заключается в том, что последовательно включают и отключают все точки коммутации группы матричных соединений путем последовательного замыкания и размыкания контактов герконов, контролируют после включения каждой точки коммутации соответствующего матричного соединителя замыкание .контактов геркона во включенной в данный момент точке коммутации и размыкание герконов во всех остальных точках, фиксируют при этом координаты коммутирующих элементов и характер неисправности при наличии разомкнутых контактов герконов во включенных точках коммутации и замкнутых контактов герконов в отключенных точках коммутации. Причем упомянутое последовательное замыкание и размыкание контактов герконов осуществляют в одноименных точках коммутации с частотой, превышающей минимальную частоту, достаточную для затухания переходного процесса на выходах матричных соединителей, а контролируют замыкание и размыкание контактов герконов сначала первого матричного соединения, затем следующих в порядке коммутации одноименных точек коммутации. Приводится устройство, реализующее способ Изобретение повышает производительность контроля групп матричных соединителей за счет того, что контроль осуществляется на частоте более высокой, чем в известном способе, когда контроль осуществляется на низкой частоте, при которой переходные процессы нз выходах матричных соединителей успевают затухнуть. Причем производительность повышается пропорционально количеству контролируемых матричных соединителей. 3 ил. Ч ю СП Ы
Формула изобретения Способ контроля группы матричных соединителей, заключающийся в том, что последовательно включают и отключают все точки коммутации группы матричных соеди- нй1Гёлей путем последовательного замыкания и размыкания контактов коммутирующих между соответствующими входами и выходами матричных соединителей, контролируют после включения каждой точкой коммутации соответствующего матричного соединителя замыкание коммутирующего элемента во включенной в данный
момент точке коммутации и размыкание коммутирующих элементов во всех остальных точках коммутации группы матричных соединителей, фиксируют при этом координаты неисправных коммутирующих элементов и характер неисправности по величине переходного сопротивления контактов коммутирующих элементов при наличии разомкнутых коммутирующих элементов во включенных точках коммутации и замкнутых коммутирующих элементов в отключенных точках коммутации группы матричных соединителей, отличающийся тем, что. с
целью повышения производительности контроля, упомянутое последовательное замыкание и размыкание контактов коммутирующих элементов осуществляют в одноименных точках коммутации группы матричных соединителей с частотой, превышающей минимальную частоту, достаточную для затухания переходного
процесса на выходах матричных соединителей, а контролируют замыкание и размыкание коммутирующих элементов во всех точках коммутации сначала первого матричного соединителя, затем следующих матричных соединителей в порядке коммутации одноименных точек коммутации.
I
I
4
Ф09. 2
a.a
a 5 8 г д е
X -J 1 ж 3 / U ° о о о о .о b о4
б Р° о о о о о оооооооо
TN
V °
0о о о о Ъ сГ 1:Г о4
. -- -«S-
го о о о
-За
л о о
о ооооо
-«Sf----agU jg. ----- --ooоо о о о о
J
J
/гл Kowii/fffffnt/is aa
tfj
TN
о о о о о о
о о о о
л о о;
--
J
&Л. M0VXU Х0КЩ/77Щ /
Фиг.З
| Переходник И,Г | |||
| и др | |||
| Автоматические приборы для тренировки матричных соединителей | |||
| Сборник научных трудов ЦНИ- Исвязи, 1974, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
