та, триггер 23 управления, шину 24 уп- оавления, шину 25 запроса, шину 26 запуска, шину 28 синхронизации и п шин 27 результата. При поступлении сигнала Разрешение запускается преобразователь 4, который формирует ультразвуковые импульсы взвукопроводе 1. Han выходах счетчика 10 формируется код фазы механотронной шкалы преобразователя точного отсчета, а на m выходах счетчиков 12 и 14 - коды грубого отсчета. По принятому преобразователем 5 сигналу фиксируются коды точного и грубого отсчетов, которые затем используются для определения перемещения объекта. 6 ил., 1 табл.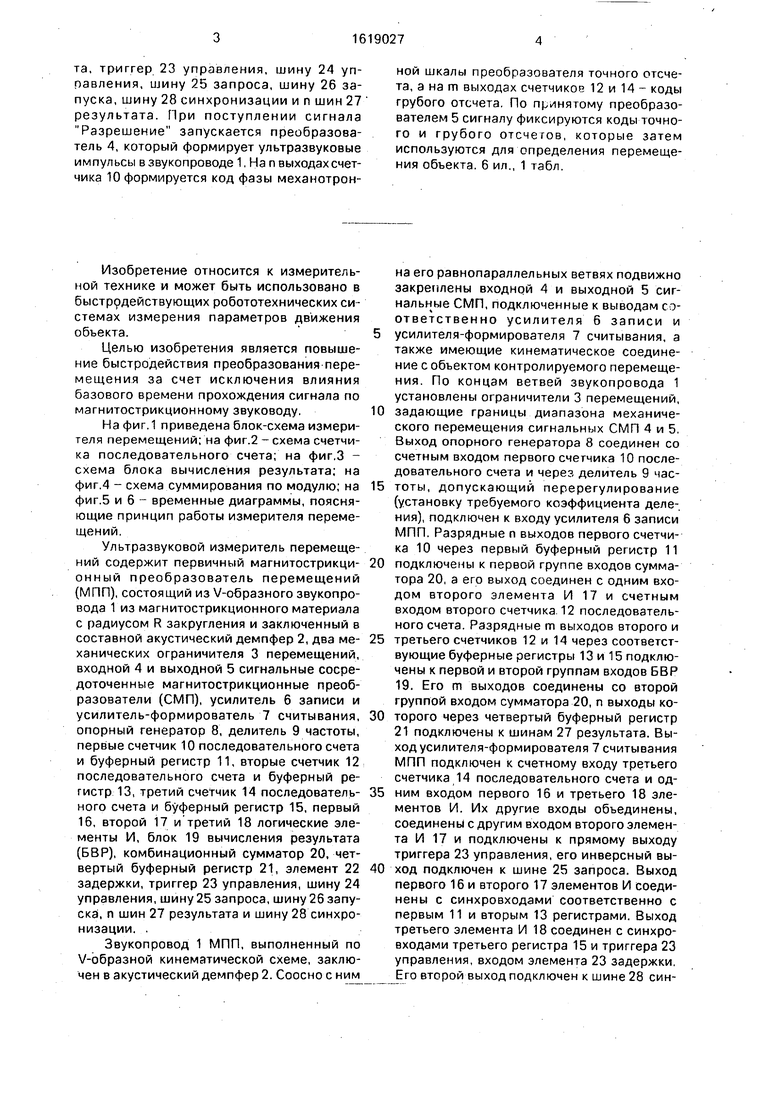

| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2035692C1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1589051A1 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032179C1 |
Изобретение относится к измерительной технике и может быть использовано в быстродействующих робототехнических системах измерения параметров движения объект Целью изобретения является повышение быстродействия преобразования перемещения за счет исключения влияния базового времени прохождения сигнала по магнито- стрикционному звукопроводу. Устройство содержит первичный магнитострикционный преобразователь перемещений, состоящий из V-образного звукопровода 1 с акустическим демпфером 2 и ограничителями 3 перемещений, входного 4 и выходного 5 сосредоточенных сигнальных магнито- стрикционных преобразователей, усилителя 6 записи и усилителя-формирователя 7 считывания, а также опорный генератор 8, делитель 9 частоты, три счетчика 10, 12 и 14 последовательного счета, четыре буферных регистра 11, 13, 15 и 21, три логических элемента / 16,17 и 18, сумматор 20, элемент 22 задержки, блок 19 вычисления результа
Изобретение относится к измерительной технике и может быть использовано в быстродействующих робототехнических системах измерения параметров движения объекта.
Целью изобретения является повышение быстродействия преобразования перемещения за счет исключения влияния базового времени прохождения сигнала по магнитострикционному звуководу.
На фиг.1 приведена блок-схема измерителя перемещений; на фиг.2 - схема счетчика последовательного счета; на фиг.З - схема блока вычисления результата; на фиг.4 - схема суммирования по модулю; на фиг.5 и 6 - временные диаграммы, поясняющие принцип работы измерителя перемещений.
Ультразвуковой измеритель перемещений содержит первичный магнитострикци- онный преобразователь перемещений (МПП), состоящий из V-образного звукопро- вода 1 из магнитострикционного материала с радиусом R закругления и заключенный в составной акустический демпфер 2, два механических ограничителя 3 перемещений, входной 4 и выходной 5 сигнальные сосредоточенные магнитострикционные преобразователи (СМП), усилитель 6 записи и усилитель-формирователь 7 считывания, опорный генератор 8, делитель 9 частоты, первые счетчик 10 последовательного счета и буферный регистр 11, вторые счетчик 12 последовательного счета и буферный регистр 13, третий счетчик 14 последовательного счета и буферный регистр 15, первый 16, второй 17 и третий 18 логические элементы И, блок 19 вычисления результата (БВР), комбинационный сумматор 20, четвертый буферный регистр 21, элемент 22 задержки, триггер 23 управления, шину 24 управления, шину 25 запроса, шину 26 запуска, п шин 27 результата и шину 28 синхронизации. .
Звукопровод 1 МПП, выполненный по V-образной кинематической схеме, заключен в акустический демпфер 2. Соосно с ним
на его равнопараллельных ветвях подвижно закреплены входной 4 и выходной 5 сигнальные СМП, подключенные к выводам соответственно усилителя 6 записи и
усилителя-формирователя 7 считывания, а также имеющие кинематическое соединение с объектом контролируемого перемещения. По концам ветвей звукопровода 1 установлены ограничители 3 перемещений,
0 задающие границы диапазона механического перемещения сигнальных СМП 4 и 5. Выход опорного генератора 8 соединен со счетным входом первого счетчика 10 последовательного счета и через делитель 9 час5 тоты, допускающий перерегулирование (установку требуемого коэффициента деления), подключен к входу усилителя 6 записи МПП. Разрядные п выходов первого счетчика 10 через первый буферный регистр 11
0 подключены к первой группе входов сумматора 20, а его выход соединен с одним входом второго элемента И 17 и счетным входом второго счетчика 12 последовательного счета. Разрядные m выходов второго и
5 третьего счетчиков 12 и 14 через соответствующие буферные регистры 13 и 15 подключены к первой и второй группам входов БВР 19. Его m выходов соединены со второй группой входом сумматора 20, п выходы ко0 торого через четвертый буферный регистр 21 подключены к шинам 27 результата. Выход усилителя-формирователя 7 считывания МПП подключен к счетному входу третьего счетчика 14 последовательного счета и од5 ним входом первого 16 и третьего 18 элементов И. Их другие входы объединены, соединены с другим входом второго элемента И 17 и подключены к прямому выходу триггера 23 управления, его инверсный вы0 ход подключен к шине 25 запроса. Выход первого 16 и второго 17 элементов И соединены с синхровходами соответственно с первым 11 и вторым 13 регистрами. Выход третьего элемента И 18 соединен с синхровходами третьего регистра 15 и триггера 23 управления, входом элемента 23 задержки. Его второй выход подключен к шине 28 синхронизации, а первый выход соединен с синхровходом четвертого буферного регистра 21. Единичный вход триггера 23 управления, первого 10, второго 12 и третьего 14 счетчиков последовательного счета, вход управления опорного генератора 8 подключен к шине 24 управления.
Устройство работает следующим образом.
В исходном состоянии счетчики 10, 12 и 14 и регистры 11, 13, 15 и 21 установлены в нулевое состояние. Работа устройства заблокирована, и оно не реагирует на сигналы Запуск, поступающие в этот момент по шине 26 запуска (фиг.1).
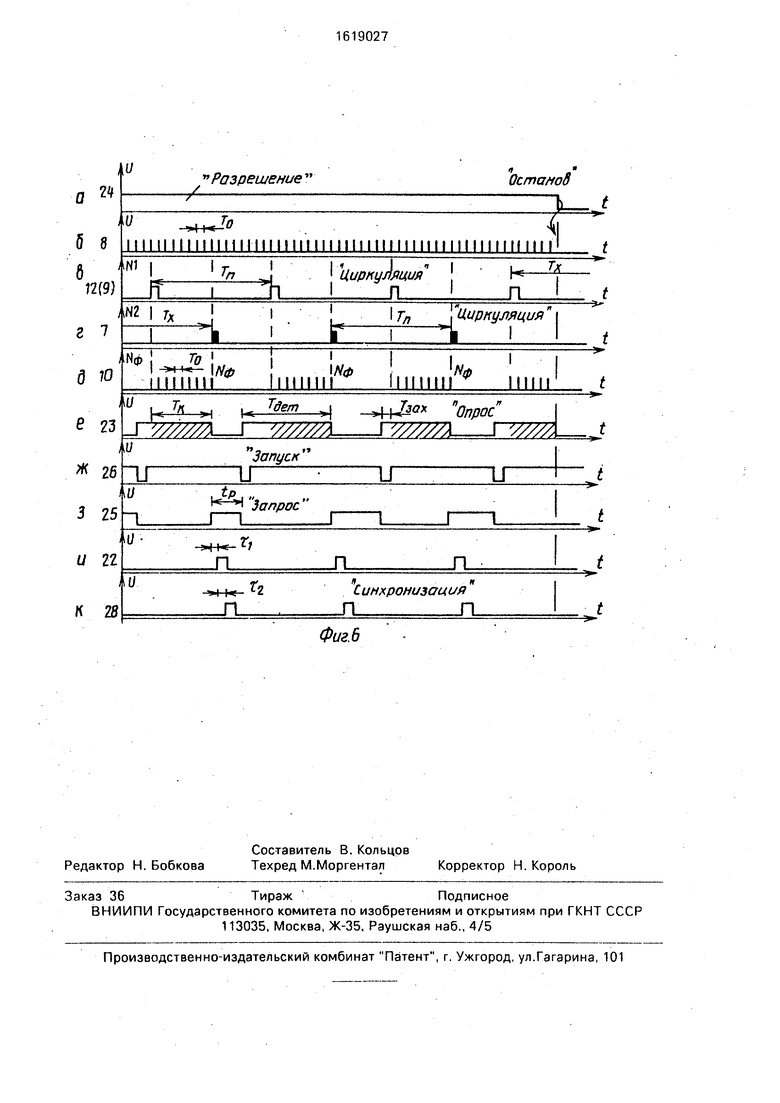
Перевод устройства в режим работы производится при подаче по шине 24 управления цифрового сигнала Разрешение (фиг.ба), по которому осуществляется разблокирование нулевых входов счетчиков 10, 12 и 14/ триггера 23 управления и входа управления опорного генератора 8. С этого момента опорный генератор 8 вырабатывает последовательность импульсных сигналов высокостабильной частоты fo 1/То (фиг.бб), которые проходят на счетные входы первого счетчика 10 последовательного счета и делителя 9 частоты, настроенные на коэффициент пересчета К.
На выходе делителя 9 частоты формируется циклическая последовательность цифровых импульсных сигналов частоты fn следования fп 1 /Тп fo/K, которые поступают на вход первичного МПП и возбуждают его усилитель б записи (фиг.бв). Сигнальный усилитель 6 формирует токовые сигналы записи, которые проходят на вход СМП 4 и возбуждают под ним в среде маг- нитострикционного звукопровода 1 магни- тоупругие волны. Эта последовательность магнитоупругих волн распространяется в обе стороны по V-образному звукопроводу с продольной фазовой скоростью V.
Распространяясь влево по звукопроводу (фиг.1) магнитоупругие волны в некоторый момент времени достигают акустический демпфер 2 и рассеивают на нем свою энергию. Распространяясь вправо по звукопроводу магнитоупругие волны циклической последовательности (фиг.бг) через искомое время перемещения объекта Тх (21 + лЯ), где 1Х - искомое перемещение объекта, R - радиус закругления звукопровода, достигают выходного СМП 5 и индуцируют на его выводах импульсные сигналы считывания, которые сигнальным усилителем-формирователем 7 преобразуются в прямоугольные видеоимпульсы. Распространяясь далее по звукопроводу магнитоупругие волны в следующий момент
времени достигают акустический демпфер 2 5 и рассеивают на нем свою энергию. Таким образом, в V-образном звукопроводе 1 не происходит образования отраженных (инверсных) магнитоупругих волн. Ограничители 3 перемещений зэдакгг диапазон 10 линейного перемещения х Тх V сигнальных СМП 4 и 5 вдоль звукопровода и предохраняют их от случайного механического повреждения в крайних точках диапазона,
Следовательно, на входе и выходе пер- 15 вичного МПП циркулируют последовательности цифровых импульсов цифровой (фиг.бв) и магнитострикционной (фиг.бг) мерных шкал, текущее значение N которых отличается на величину искомого интервала 0 Тх перемещения (фиг.5а,б).
Эта циклическая последовательность импульсов механотронной шкалы преобразователя преобразуется во втором 12 и третьем 13 счетчиках последовательного 5 счета в текущие m-разрядные коды соответственно N1 и N2 грубого отсчета, которые с точностью /1 ±0,5-Тп позволяют определить искомое перемещение контролируемого объекта. На п выходах первого счетчика 0 10 последовательного счета формируется кодМф Тф- fo фазы механотронной шкалы преобразователя точного отсчета (фиг.бд), По этой шкале отсчета точность составляет величину т/2 - ±0,5 То, которая задается 5 путем установки рабочей частоты fo опорного генератора 8. Счетчики 10, 12 и 14 последовательного счета (а также делитель 9 частоты) выполнены на основе комбинационного сумматора 29 и регистра 30 парал- 0 лельного сдвига, включенные в кольцо (фиг.2). Такая схема позволяет повысить быстродействие переключения за счет параллельного преобразования сигналов и реализовать сумматор на программируемых 5 логических матрицах типа ПЗУ или РПЗУ, что дает возможность функционального программирования.
Циркулирующая последовательность кодов К|ф и N1, N2 точного и грубого отсче- 0 тов записывается (заносится) в соответствующие буферные регистры 11, 13 и 15 только после подачи цифрового импульсного сигнала Запуск (фиг.бж) по шине 26 запуска.
5 с приходом сигнала Запуск производится переключение триггера 23 управления в единичное состояние (фиг.бе), сигнал которого разблокирует входы логических элементов И 16-18, выполняющие роль логического ключа, и элемента задержки сигналов на время переключения счетчика 14. Одновременно снимается цифровой сигнал
Запрос (фиг.бз) по шине 25 запроса устройства.
По первому же сигналу переноса (Тп K/fo) первого счетчика 10 последовательного счета через открытый второй элемент И 17 производится запись кода N1 текущего значения (фиг.5а и 6в) во второй буферный регистр 13 и хранится до следующего цикла преобразования. Интервал времени между сигналами Запуск и Перенос определяет время захвата фазы механотрон- ной шкалы преобразователя, которое не превосходит величины Т3ах Тп (фиг.бе).
В следующий момент времени по первому же сигналу магнитострикционной шкалы грубого отсчета (фиг.бг), формируемого на выходе сигнального усилителя-формирователя 7 считывания МПП, через открытые первый 16 и третий 18 элементы И производится запись кодов Мф и N2 текущего значения соответственно в первый 11 и третий 15 буферные регистры и хранятся до следующего цикла преобразования. Одновременно производится запуск элемента 22 задержки и переключение в исходное состояние триггера 23 управления. Этот интервал времени определяется фазовым сдвигом Тф механотронной шкалы и задает интервал кодирования Тк фазы (фиг.5в и бе). Перевод триггера 23 управления в исходное состояние приводит к блокированию входов логических элементов И 16-18 и выставлению сигнала Запрос (фиг.бз) по шине 25 запроса устройства..
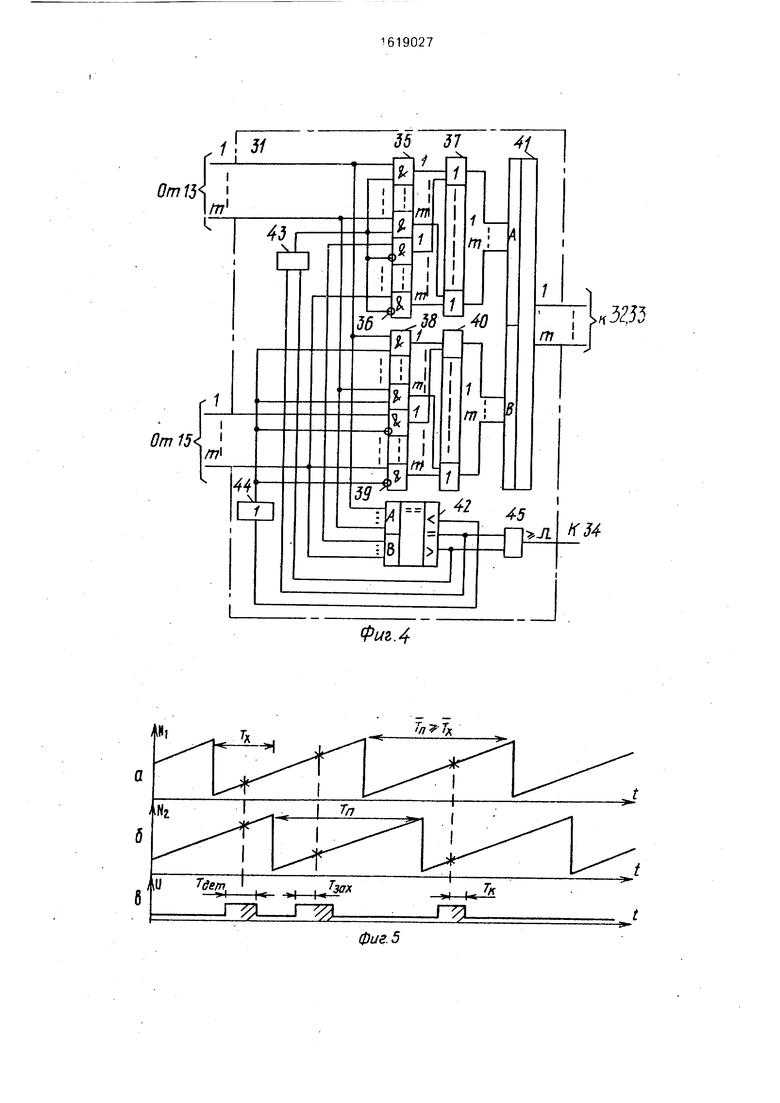
Сформированные коды N1, N2 (инверсное значение кода формируется на выходах регистра 15) грубого отсчета механотронной шкалы поступают на группы информационных входов БВР 19, выполненный на основе схемы 31 суммирования по модулю, схемы 32 задержки, схемы 33 коррекции перекоса и коммутатора 34 (фиг.З), в котором производится вычисление разностного т-разряд- ного кода AN IN1-N2I перемещения по грубой шкале отсчета ( f} ±0,5 Тп).
Вследствие цикличности формируемой механотронной шкалы грубого отсчета и произвольного (не синхронизированного) во времени опроса возможна двузначность отсчета кодов N1, N2 на их границах смены (1 ...11-4L.OO), что приводит к недостоверному результату. Для устранения неоднозначности (или перекоса считывания) кода AN в БВР 19 применяются m-разрядные схемы 32 и 33. Схема 32 является пассивной и не вносит коррекцию в результирующий сигнал AN I N1 + N21 , вычисленный схемой 31, но производит задержку сигнала на время преобразования кода AN активной схемой 33, выполненной на элементах ПЗУ (или РПЗУ), которая осуществляет декодирование неоднозначности результирующего ко- да А N I N1 N2 I . В этом случае для ПЗУ
схемы 33 коррекции перекоса применяют симметричное кодирование с осью симметрии т/2 (см. таблицу).
Прямой и преобразовательный коды AN и А N с выходов схем 32 и 33 поступают на сигнальные входы цифрового коммутатора 34, который в зависимости от знака перекоса (1/0), формируемого схемой 31, подключает к выходам БВР 19 выходы схем 32 или 33.
Схема 31 суммирования по модулю (фиг.4) может быть выполнена на основе первой 35, второй 36 и третьей 38, четвертой 39 группах логических элементов И, первой 37 и второй 40 группах логических элементов ИЛИ, сумматоре 41, трех логических элементах ИЛИ 43-45 и цифровом компараторе 42. Элементы 35-40 обеспечивают однозначное вычисление кодов N1. N2, поступающих на сумматор 41 независимо от их
значения. Компаратор 42 определяет их паритет и формирует, таким образом, знак (1/0) перекоса циклического считывания. Формирование разностного кода AN перемещения в виде обратного кода за счет ис:
пользования арифметической операции сложения позволяет почти в два раза повысить быстродействие вычисления, так как не производится формирование дополнительного кода числа.
Вычисленный код AN с m выходов БВР
19 проходит на одну группу входов комбинационного сумматора 20. На вторую группу его входов поступает n-разрядный код Мф фазы. В результате на выходах сумматора 20 в следующий момент времени сформирован n-разрядный результирующий код NX AN + Ыф искомого перемещения контролируемого объекта, который через время задержки ,is , где
г-|з,15, 719 , Г20 время распространения сигналов через цепи блоков 13, 15, 19 и 20, занесен в четвертый буферный регистр 21 (фиг.бг) и хранится до следующего цикла преобразования. С выходов регистра 21 ре0 зультирующий код поступает на шины 27 результата, формируя цифровой сигнал Код положения, В следующий момент времени TI т + Г21 , где Т21 - время задержки распространения сигналов через цепи
5 блока 21, по шине 28 синхронизации выставлен цифровой импульсный сигнал Синхронизация (фиг.бк).
На этом цикл преобразования заканчивается и устройство подготовлено к следующему циклу преобразования, который начинается через время реакции пользователя tp (фиг.бз) по сигналу Запуск и выполняется без изменения согласно рассмотренного. В целом функция преобразования устройства может быть описана следующим выражением
Z 5-Tx-V( IN1 -N2I ), где 5 2- число проходов базы магнитоуп- ругой волной МПП, определяющее чувствительность по перемещению.
Устройство может быть переведено в режим синхронной работы с пользователем при объединении шин 28 и 26. Его работа блокирована (режим останова) при снятии сигнала Разрешение по шине 24 управления.
Функциональные возможности устройства могут быть расширены путем использования программируемых логических матриц типа ПЗУ или РПЗУ и программирования коэффициента М пересчета (деления) делителя 9 частоты, что позволяет повысить точность измерения в (М/К 1) раз, где К - коэффициент пересчета счетчика 10. за счет соответствующего увеличения Тп, и как следствие Тц, т.е. rj - ±0,5-K-To/M.
Повышение быстродействия преобразования предлагаемого измерителя достигается за счет частотно-временного кодирования интервала перемещения на основе метода кратных шкал, позволяющего разбить весь интервал перемещения Тх на ряд подинтервалов длительности Тп из условия
Тп Тп, 1
где К-число подинтервалов, выбираемое из требуемого времени преобразования и граничной частоты возбуждения МПП.
В этом случае время преобразования устройства лежит в диапазоне
Тк Тц(Тзах + Тк) Тдет, приблизительно в (ТХ/ТК + 1) раз меньше, чем у известного измерителя. Это позволяет стабилизировать и программировать Тц в известных пределах, делая возможным использование измерителя в быстродействующих системах измерения, контроля и управления параметрами движения объекта.
Формула изобретения Ультразвуковой измеритель перемещений, содержащий усилитель записи, усилитель-формирователь считывания, зву- копровод из магнитострикционного материала, заключенный в акустический демпфер.
соосно с которым закреплены с возможностью перемещения входной и выходной маг- нитострикционные преобразователи, выводы которых подключены соответствен- 5 но к выходам усилителя записи и входам усилителя-формирователя считывания, опорный генератор, первый и второй элементы И, первый счетчик последовательного счета и триггер управления, отличаю- 10 щ и и с я тем, что, с целью повышения быстродействия преобразования, он снабжен делителем частоты, вторым и третьим счетчиками последовательного счета, первым-четвертым регистрами, третьим эле- 15 ментом И, блоком вычисления результата, сумматором и элементом задержки, один выход которого подключен к шине синхронизации, а другой соединен с синхровходом четвертого регистра, выводы которого под- 0 ключены к шине результата, а информационные входы соединены с выходами сумматора, первые входы которого подключены через первый регистр к выходам первого счетчика последовательного счета, 5 счетный вход которого соединен с выходом опорного генератора и через делитель частоты подключен к входу усилителя записи, вход синхронизации первого регистра соединен с выходом первого элемента И, вго- 0 рые входы сумматора соединены с выходами блока вычисления результата, первая и вторая группы входов которого подключены соответственно к выходам второго и третьего счетчиков последовательно- 5 го счета через второй и третий регистры, вход синхронизации второго регистра соединен с выходом второго элемента И, один вход которого соединен со счетным входом второго счетчика последовательного счета и 0 выходом переноса первого счетчика последовательного счета, вход синхронизации третьего регистра соединен с выходом третьего элемента И, синхровходом триггера управления и входом элемента задержки, 5 инверсный выход триггера управления подключен к шине запроса, а прямой выход соединен с одними входами первого, второго и третьего элементов И, другие входы первого и третьего элементов И объединены, 0 соединены со счетным входом третьего счетчика последовательного счета и подключены к выходу усилителя-формирователя считывания, единичный вход триггера управления подключен к шине запуска, а его 5 нулевой вход соединен с нулевыми входами первого, второго и третьего счетчиков последовательного счета и управляющим входом опорного генератора и подключен к шине управления.
13
Фм.1
т
15
т
3#3
Фиг. 4
фиг 5
| Устройство для измерения перемещений | 1983 |
|
SU1158865A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитострикционный дифференциальный преобразователь перемещений | 1978 |
|
SU747812A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
