Изобретение относится к измерительной технике, а именно к ультразвуковым преобразователям перемещений, и может найти применение в робототехнических системах и комплексах для измерения и контроля параметров кинематического движения объекта.
Известен ультразвуковой преобразователь линейных перемещений, содержащий Y-образный звукопровод из магнитострикционного материала со свободным концом, акустический демпфер, два ограничителя перемещений, распределенный элемент записи-считывания с основным магнитом смещения, два дополнительных магнитных отражателя, механически связанные с объектом [1].
Известен ультразвуковой преобразователь линейных перемещений, выбранный в качестве прототипа, который содержит магнитострикционный звукопровод со свободным концом, заключенный в акустический демпфер, элемент записи с магнитом смещения и элемент считывания с магнитом смещения, усилитель записи, одновибратор, предусилитель и усилитель-формирователь считывания, триггер, блок АРУ, четыре регистра, коммутатор, элемент задержки, генератор кодов, блок деления, компаратор, входные и выходные шины [2].
Общим недостатком известных устройств является недостаточная точная точность измерения перемещений из-за влияния дестабилизирующих факторов среды, например изменение температуры окружающей среды, а также сложность аппаратурной реализации, что снижает быстродействие и надежность.
Техническим результатом изобретения является повышение точности и надежности преобразования линейных перемещений в код за счет коррекции температурной погрешности и упрощения структуры вторичного преобразователя.
Это достигается тем, что в ультразвуковой преобразователь линейных перемещений, содержащий прямолинейный звукопровод со свободным концом из магнитострикционного материала с одним знаком магнитострикции, другой его конец заключен в акустический демпфер, два ограничителя перемещений, установленные по его концам, сосредоточенный элемент считывания с магнитом смещения, неподвижно закрепленный на звукопроводе вблизи его акустического демпфера и подключенный к выводам избирательного усилителя-формирователя считывания, сосредоточенный элемент записи, закрепленный на звукопроводе с возможностью перемещения между ограничителями перемещений и кинематически подключенный к объекту, его выводы подсоединены к выходам усилителя записи, вход которого подключен к выходу одновибратора, триггер и измерительный генератор, его вход соединен с прямым выходом триггера, дополнительно введены второй прямолинейный звукопровод со свободным концом из магнитострикционного материала с другим знаком магнитострикции, установленный равнопараллельно первому звукопроводу и заключенный в акустический демпфер, второй сосредоточенный элемент считывания, неподвижно закрепленный на втором звукопроводе параллельно первому элементу считывания с магнитом смещения, его выводы подсоединены к выводам второго избирательного усилителя-формирователя считывания, а элемент записи охватывает второй звукопровод, второй и третий триггеры, первый и второй элементы И, первый, второй и третий счетчики, сумматор и инвертор. Выход одновибратора соединен с нулевыми входами первого, второго и третьего счетчиков и через инвертор подключен к одним входам первого и второго элементов И и счетному входу третьего счетчика через измерительный генератор, а инверсный выход подключен к шине запроса, нулевые входы первого, второго и третьего триггеров объединены, соединены с одним входом одновибратора и подключены к шине управления, другой вход одновибратора подключен к шине запуска, выходы второго и третьего триггеров через первый и второй элементы И подключены к счетным входам первого и второго счетчиков соответственно, их разрядные выходы подсоединены к первой и второй группам входов сумматора, а его выходы подключены к шинам результата, выход третьего счетчика соединен с синхровходом первого триггера.
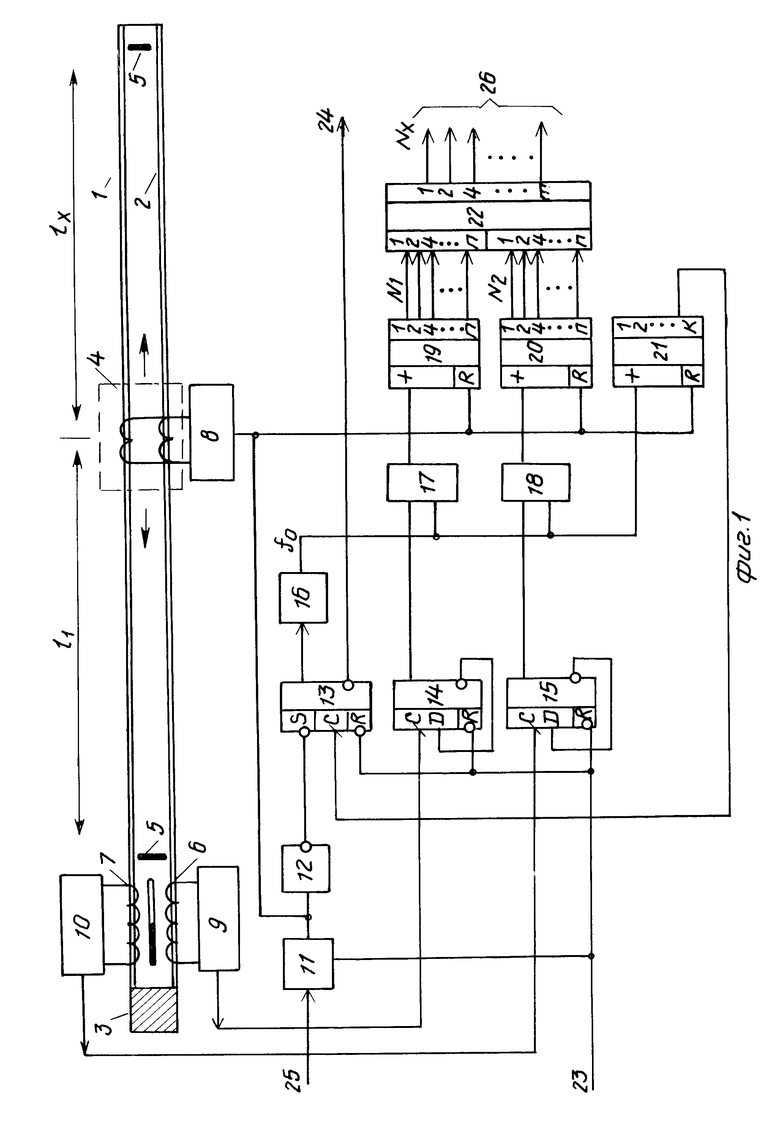
На фиг. 1, 2 приведены блок-схемы ультразвукового преобразователя линейных перемещений, выполненного по условно контактной и неконтактной кинематическим схемам первичного преобразователя.
Ультразвуковой преобразователь линейных перемещений содержит первичный магнитострикционный преобразователь перемещений (МПП), состоящий из первого и второго прямолинейных звукопроводов 1, 2 со свободными концами из магнитострикционных материалов с разными знаками коэффициентов магнитострикции, закреп- ленные равнопараллельно друг друга и установленные в акустический демпфер 3, сосредоточенный элемент 4 записи, закрепленный на звукопроводах с возможностью перемещения между ограничителями 5 перемещений и кинематически подключенный к объекту, первый и второй сосредоточенные элементы 6, 7 считывания с магнитом смещения, закрепленные на опорном расстоянии от акустического демпфера 3 на звукопроводах 1, 2 соответственно, усилитель 8 записи, подсоединенный к выводам элемента 4 записи, первый и второй избирательные усилители-формирователи 9, 10 считывания, подсоединенные к выводам первого и второго элементов 6, 7 считывания соответственно, и вторичный преобразователь, состоящий из одновибратора 11, инвертора 12, первого, второго и третьего триггеров 13, 14, 15, измерительного генератора 16, первого и второго элементов И 17, 18, первого, второго и третьего счетчиков 19, 20, 21 и сумматора 22.
Выход одновибратора 11 подключен к входам усилителя 8 записи, инвертора 12 и соединен с нулевыми входами первого, второго и третьего счетчиков 19, 20, 21, а выход инвертора 12 соединен с единичным входом первого триггера 13. Его инверсный выход подключен к шине 25 запроса, а прямой выход через измерительный генератор 16 - к одним входам первого и второго элементов И 17, 18 и счетчиков 19, 20 соответственно. Их разрядные выходы соединены с первой и второй группами входов сумматора 22, выходы которого подключены к шинам 26 результата.
Выходы первого и второго избирательных усилителей-формирователей 9, 10 считывания подключены к синхровходам второго и третьего триггеров 14, 15, выходы которых соединены с другими входами первого и второго элементов И 17, 18. Другой вход одновибратора 11 подключен к шине 25 запуска.
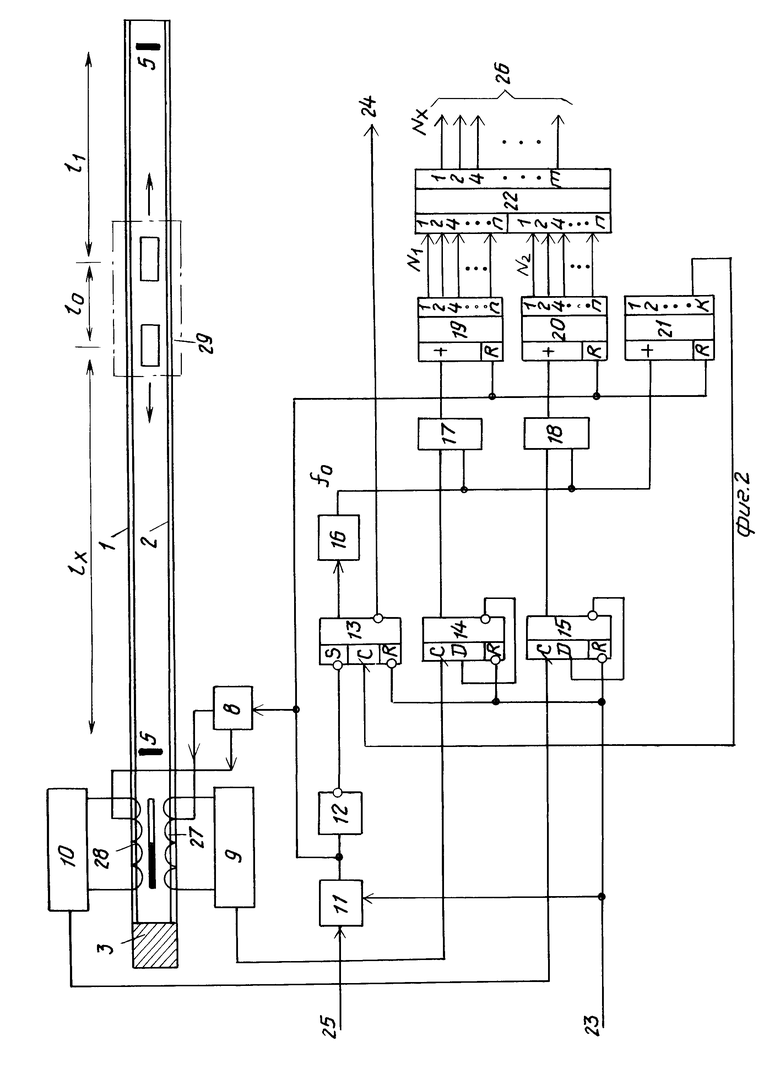
Кроме того, в ультразвуковой преобразователь линейных перемещений (фиг. 2), в его МПП дополнительно введены первый и второй сосредоточенные элементы 27, 28 записи-считывания с магнитом смещения, закрепленные на первом и втором звукопроводах 1, 2 на опорном расстоянии от акустического демпфера соответственно, магнитные отражатели 19, закрепленные на звукопроводах 1, 2 с возможностью перемещения между ограничителями 5 перемещений и кинематически соединенные с объектом. Одни выводы элементов 27, 28 записи-считывания подсоединены к выходам первого и второго избирательных усилителей-формирователей 9, 10 считывания, а другие их выводы - к выводам усилителя 8 записи.
Устройство работает следующим образом.
Первоначально по шине 23 управления выставлен сигнал "Останов", удерживающий преобразователь в заблокированном состоянии. При этом одновибратор 11 блокирован, а триггеры 13, 14, 15 установлены в нулевое состояние (фиг. 1).
При снятии сигнала "Останов" преобразователь переводится в режим ожидания начала цикла преобразования. По шине 24 запроса выставляется сигнал "Запрос", информирующий пользователя о готовности к началу цикла преобразования. В следующий момент по шине 25 запуска пользователь выставляет импульсный сигнал "Запуск", по которому запускается одновибратор 11.
На его выходе формируется импульсный сигнал, по которому счетчики 19, 20, 21 устанавливаются в исходное состояние (Q=0), возбуждается усилитель 8 записи и через инвертор 12 взводится (Q=1) триггер 13. По шине 24 запроса снимается сигнал "Запрос", и запускается измерительный генератор 16, вырабатывающий серию импульсных сигналов с частотой следования fo, которые проходят на входы логических элементов И 17, 18 и счетный вход счетчика 21. Счетчик 21 подсчитывает их число.
На выходе усилителя 8 записи формируется модулированный высокой частотой токовый импульс записи, который проходит в подвижный сосредоточенный элемент 4 записи и возбуждает в первом и втором звукопроводах 1, 2 МПП зондирующие продольные ультразвуковые (УЗ) волны вследствие магнитомеханического преобразования.
Возбужденные УЗ волны распространяются в обе стороны вдоль звукопроводов 1, 2 со скоростью vпр. Так, распространяясь влево (по фиг.1) по звукопроводам 1, 2 зондирующие УЗ волны в моменты времени соответственно:
T1.1 =  и T2.1 =
и T2.1 =  , (1) где Δ l - изменения длины l1 звукопроводов 1, 2 с разными знаками коэффициента магнитострикции под действием тепловых полей, достигают неподвижные сосредоточенные элементы 6, 7 записи с магнитом смещения и, проходя под ними, наводят на их выводах модулированные сигналы считывания вследствие магнитоупругого преобразования. Наведенные сигналы считывания демодулируются и преобразуются в прямоугольные видеоимпульсы в первом и втором избирательных усилителей-формирователей 9, 10 считывания.
, (1) где Δ l - изменения длины l1 звукопроводов 1, 2 с разными знаками коэффициента магнитострикции под действием тепловых полей, достигают неподвижные сосредоточенные элементы 6, 7 записи с магнитом смещения и, проходя под ними, наводят на их выводах модулированные сигналы считывания вследствие магнитоупругого преобразования. Наведенные сигналы считывания демодулируются и преобразуются в прямоугольные видеоимпульсы в первом и втором избирательных усилителей-формирователей 9, 10 считывания.
По сигналам считывания устанавливается в единичное состояние (Q=1) второй и третий триггеры 14, 15. Открываются логические элементы И 17, 18, через которые на счетные входы первого и второго счетчиков 19, 20 начинают проходить импульсы измерительного генератора 16.
Распространяясь вправо (по фиг.1) по звукопроводам 1,3 МПП зондирующие УЗ волны достигают свободные концы, отражаются и распространяются в сторону элементов 6, 7 считывания, достигая их через суммарное время соответственно:
T1.2 =  , (2)
, (2)
T2.2 =  , (3) где Δ lx - изменение длины lх звукопроводов 1, 2 с разными знаками коэффициента магнитострикции на момент измерения под действием тепловых полей.
, (3) где Δ lx - изменение длины lх звукопроводов 1, 2 с разными знаками коэффициента магнитострикции на момент измерения под действием тепловых полей.
На выходах избирательных усилителей-формирователей 9, 10 считывания формируются цифровые видеоимпульсы, по которым устанавливаются в исходное состояние (Q=0) второй и третий триггеры 14, 15, блокируются входы логических элементов И 17, 18. На счетные входы первого и второго счетчиков 19, 20 с этого момента не проходят счетные импульсы измерительного генератора 16. На их n разрядных выходах формируются коды искомого перемещения:
N1=Tx1·fo=(T )fo=2
)fo=2 fo, (4)
fo, (4) , (5) считанные относительно магнитострикционных шкал МПП, образованных звукопроводами 1, 2.
, (5) считанные относительно магнитострикционных шкал МПП, образованных звукопроводами 1, 2.
С выходов счетчиков 19, 20 коды (4), (5) перемещения объекта поступают в комбинационный m-разрядный сумматор 22, на выходе которого формируется результирующий код искомого перемещения.
Nx= N1+N2=  4
4  + 2
+ 2  fo, (6) выставляемый далее по шинам 26 результата с обозначением сигнала "Код перемещения".
fo, (6) выставляемый далее по шинам 26 результата с обозначением сигнала "Код перемещения".
В следующий момент времени Tоп=2(l1+lx) на К-ом выходе третьего счетчика 21 формируется сигнал, по которому переключается первый триггер 13 в исходное состояние (Q=0), что приводит к останову измерительного генератора 16 и выставлению по шине 24 запроса сигнала "Запрос". На этом цикл преобразования завершается и преобразователь подготовлен к очередному циклу преобразования, который выполняется согласно рассмотренного.
Кроме того, МПП преобразователя может быть выполнен по неконтактной кинематической схеме, как показано на фиг.2.
Магнитные отражатели 29 в виде двух постоянных магнитов, установленные на опорном расстоянии lo друг от друга, закреплены на звукопроводах 1, 2 с возможностью перемещения между ограничителями 5 перемещений и кинематически подключены к объекту. При подаче токового модулированного импульса записи на выводах первого и второго сосредоточенных элементов 27, 28 записи-считывания под ними в звукопроводах 1, 2 возбуждаются продольные УЗ-волны. А на выходах первого и второго усилителей-формирователей 9, 10 считывания формируются импульсные сигналы считывания, переключающие в единичное состояние второй и третий триггеры 14, 15, одновременно запускается измерительный генератор 16. Его импульсы проходят на счетные входы первого и второго счетчиков 19, 20 через открытые элементы И 17, 18, а также на счетный вход третьего счетчика 21.
Возбужденные УЗ волны, пройдя по звукопроводам 1, 2 МПП до магнитных отражателей 29, испытывают отражение от динамической границы, образованной вследствие ΔЕ-эффекта при намагничивании ферромагнетика, и изменяют направление своего движения. Через время соответственно:
Tx1 = 2  и Tx2 = 2
и Tx2 = 2  (7) упругие волны достигают элементы 27, 28 записи-считывания и считываются вследствие магнитоупругого преобразования.
(7) упругие волны достигают элементы 27, 28 записи-считывания и считываются вследствие магнитоупругого преобразования.
На выводах избирательных усилителей-формирователей 9, 10 считывания формируются сигналы считывания, которыми переключаются в исходное состояние (Q= 0) второй и третий триггеры 14, 15. Блокируются входы элементов И 17, 18, и счетные импульсы измерительного генератора 16 не проходят на счетные входы первого и второго счетчиков 19, 20. На их разрядных выходах формируются коды перемещения (4), (5), поступающие далее на группы входов сумматора 22, где вычисляется результирующий код искомого перемещения объекта (6).
В следующий момент по сигналу счетчика 21 останавливается (блокируется) измерительный генератор 16, по шине 24 выставляется сигнал "Запрос". Преобразователь переводится в режим ожидания очередного цикла преобразования. При подаче сигнала "Останов" рестарт преобразователя (фиг.1, 2) невозможен, а установка звукопроводов 1, 2 в акустический демпфер 3 позволяет устранить переотражение УЗ-волн в акустическом тракте МПП преобразователя.
Таким образом, применение в МПП преобразователя звукопроводов из магнитострикционных материалов с разными знаками коэффициента магнитострикции позволяет уменьшить температурную погрешность на величину (Δ lx'- Δlx") _→ 0 в широком температурном диапазоне простыми техническими средствами, и тем самым упростить его структуру и повысить быстродействие относительно прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032179C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1758429A1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2100775C1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1589051A1 |
Изобретение может быть использовано в робототехнике. Технический результат - повышение точности и надежности. Это достигается за счет устранения влияния состовляющей температурной погрешности на результат измерения и упрощения структуры вторичного преобразователя, обеспечивая при этом более высокое быстродействие по цифровому измерительному каналу. 1 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Преобразователь линейных перемещений | 1985 |
|
SU1394033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
