.Изобретение относится к медицинской технике, точнее - к устройствам для нехирургического лечения опорно-двигательного аппарата человека, и предназначено для использования в устройствах для вытяже- ния позвоночника.
Известно устройство для подводного вытяжения позвоночника, содержащее ванну, грудной и тазовый пояса, соединенные тросами с механизмом нагружения, выпол- ненным в виде подвешенного к тросу резер- вуара, гибких трубопроводов, шкалы нагрузок, клапанов управления и регулятора уровня жидкости.
Недостатком этого устройства является его сложность и ненадежность в работе.
Известно устройство для подводного вытяжения позвоночника, содержащее основание с нагрузочным механизмом в виде груза, установленного с возможностью, пе- ремещения с помощью ходового винта, кинематически связанного с приводом, по одному из плеч коромысла, причем привод размещен на другом плече коромысла, а груз имеет возможность контакта с конеч- ными выключателями, установленными на первом плече.
Недостатком данного устройства является сложность расширения диапазона регулирования нагрузок (необходимость установки дополнительных грузов),
Цель изобретения-упрощение регулирования диапазона задаваемых нагрузок.
Указанная цель достигается за счет того, что в устройстве для подводного вытяже- ния позвоночника, содержащем основание, нагрузочный механизм узел управления и тягу, механизм нагружения выполнен в виде смонтированного на основании посредством оси коромысла, на одном плече которо- го установлен привод, а на другом с возможностью перемещения вдоль плеча - груз и стойки, на которых установлен ходовой винт для перемещения груз.а, а узел управления выполнен в виде установленной в стойках и оснащенной шкалой линейки q постоянным и передвижным упорами, взаимодействующими с конечными выключате-
лями, -управляющими работой электродвигателя привода.
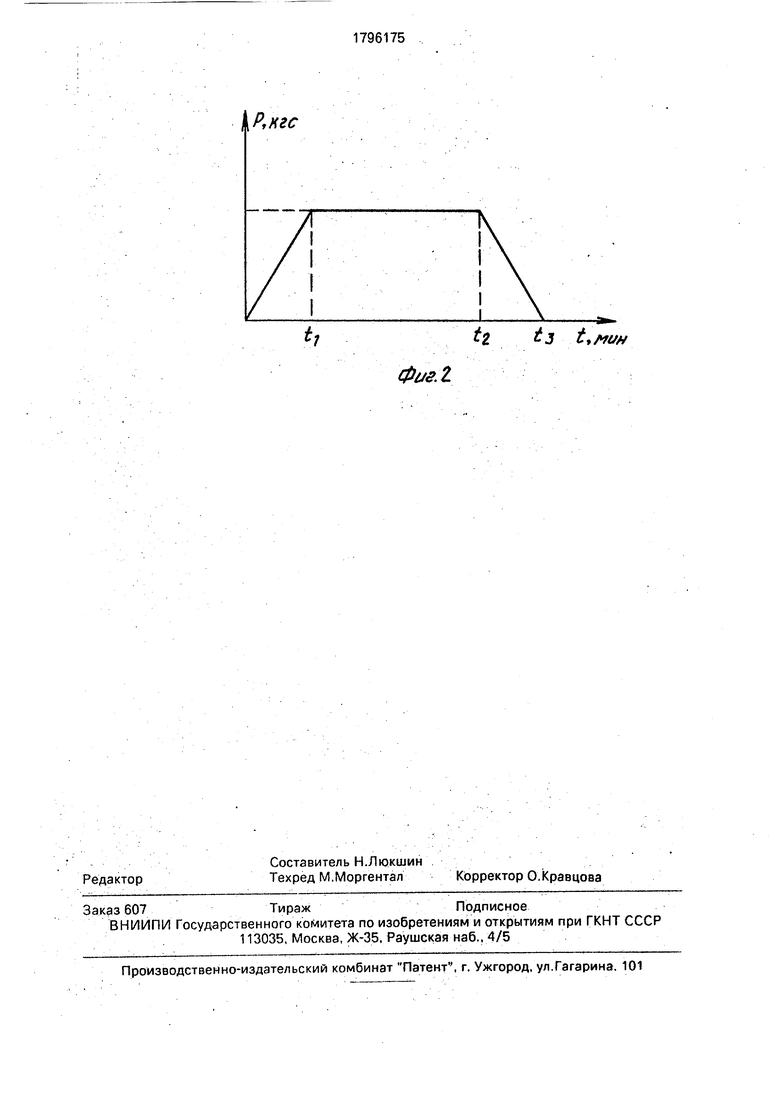
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - диаграмма нагружения пациента.
Устройство для подводного вытяжения позвоночника содержит основание 1, тягу 2 и нагрузочный механизм, выполненный в виде смонтированного на основании 1 посредством оси 3 коромысла 4, на одном плече которого установлен привод 5, а на другом с возможностью перемещения вдоль плеча - груз 6 и стойки 7 и 8, на которых установлен ходовой винт 9 для перемещения груза 6, кинематически соединенный с приводом 5. В стойках 7. 8 размещена также подвижная линейка 10с постоянным 11 и передвижным 12 упорами, взаимодействующими с грузом 6. и кулачками 13 и 14, взаимодействующими с конечными выключателями 15 и 16, управляющими работой двигателя привода 5. Ходовой винт 9 соединен с приводом 5 муфтой 17. Передвижной упор 12 имеет фиксатор 18, Линейка 10 имеет шкалу 19, отградуированную в килограммах, кулачки 13 и 14, соответственно взаимодействующие с конечными выключателями 15 и 16. Линейка 1C установлена с возможностью перемещения в отверстиях 20 и 21 стоек 7 и 8 соответственно. Конечные выключатели 15и смонтированы на стойке 7, с которой посредством оси 22 соединена тяга 2, шнур капроновый. Расстояние А от оси 22 до оси 3 и. расстояние Б от оси 3 до центра тяжести (ЦТ) б соответственно равны. Устройство имеет реле 23 времени для установки времени проведения процедуры в минутах, которое электрически связано с электродвигателем привода 5 и конечными выключат.е- лями 15 и 16.
Устройство используется следующим образом.
.Пациента помещают в ванну (на фиг. не показана) с водой или в бассейн в вертикальном или в горизонтальном положении и при помощи специального корсета через систему блоков присоединяют к корсету тягу 2
и выбирают люфт. При этом груз б контактирует с постоянным упором 11, кулачок 14 взаимодействует с конечным выключателем 16. Нагрузочный механизм находится в состоянии равновесия, усилие вытяжения Р равно нулю (фиг. 2). Стрелка реле времени 23 находится в нулевом положении.
Для установки требуемой величины на- гружения упор 12 перемещают по линейке 10 до заданного деления шкалы 19 и стопорят фиксатором 18, Далее стрелку реле времени 23 устанавливают на заданное время (фиг. 2) проведения процедуры с учетом времени перемещения груза на определенную величину Р нагружения. При установке (повороте) стрелки реле 23 времени на заданное время происходит включение электродвигателя привода 5 (дается сигнал электрический на включение двигателя). Вращением двигателя и ходового винта 9 груз 6 перемещается в сторону упора 12, вызывая поворот коромысла 4 относительно оси 3.
Нагрузка Р на шнуре 2 возрастает прямо пропорционально линейному перемещению груза б по коромыслу 4, Груз 6 доходит до упора 12 и своим движением перемещает линейку 10, при этом кулачок 14 освобождает конечный выключатель 16, а кулачок 13 нажимает на конечный-выключатель 15, который дает электрический сигнал на отключение двигателя привода 5. В результате груз 6 останавливается на заданном расстоянии, т.е. нагрузка Р достигла заданной величины.
Под действием веса груза 6 на плече В производится поворот коромысла 4 на оси 3 и натяжение капронового шнура 2 (тяги) заданным усилием Р в течение заданного
времени. Идет процедура вытяжения позвоночника пациента с постоянной нагрузкой Р. Стрелка реле 23 времени приближается к нулевому положению (к исходному положению).
Когда стрелка достигнет нулевого положения, реле 23 времени дает сигнал на включение двигателя привода 5 в обратном направлении. Груз 6 посредством ходового винта 9 перемещается в сторону упора 11.
Происходит плавное снятие нагрузки Р с пациента. Груз 6 доходит до упора 11 и своим движением перемещает линейку 10. При этом кулачок 13 освобождает конечный выключатель 15,.а кулачок 14 нажимает на конечный выключатель 16, который дает сигнал на отключение двигателя привода 5, в результате груз 6 останавливается в исходном положении, т.е. .
С остановкой двигателя дается звуковой и световой сигнал об окончании процедуры (соответствующие устройства на фиг. не показаны).
Если по каким-то причинам возникает
необходимость снять нагрузку и прекратить процедуру, то на пульте (на фиг. не показан) нажимается кнопка (на фиг, не показана) Снятие нагрузки. При этом груз 6 под действием двигателя и ходового винта 9 вернется в исходное; положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для подводного вытяжения | 1969 |
|
SU482952A1 |
| Устройство для подводного вытяжения позвоночника | 1987 |
|
SU1416121A1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2001 |
|
RU2193383C1 |
| Способ лечения остеохондроза позвоночника и устройство для его осуществления | 1991 |
|
SU1790403A3 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ВЕРТИКАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2003 |
|
RU2246924C1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2000 |
|
RU2187291C2 |
| Устройство для подводного вертикального вытяжения позвоночника | 1978 |
|
SU741873A1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ГОРИЗОНТАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2003 |
|
RU2257880C1 |
| Устройство для подводного вытяжения позвоночника | 1990 |
|
SU1762919A1 |
| Устройство для вытяжения позвоночника | 1988 |
|
SU1512603A1 |

Формула изобретения Устройство для подводного вытяжения позвоночника, содержащее основание с нагрузочным механизмом, выполненным в виде коромысла, на одном плече которого размещен привод, а на другом - кинематически связанный с приводом ходовой винт с подвижным грузом, и конечные выключатели, отличающееся тем, что, с целью упрощения регулирования диапазона задаваемых нагрузок, в него введена установленная параллельно ходовому винту подвижная линейка со шкалой, на которой зафиксированы переставные упоры и кулачки, кинематически связанные соответственно с грузом и конечными выключателями.
I
Р,кгс
Ъ
tz 3-.t.
/чин
Физ.1
