Изобретение относится к Измерительной технике и может быть использовано для азимутального ориентирования стабилизированных относительно горизонта площадок,
Известен способ азимутального ориентирования на основе свойств трехстепенно- го астатического гироскопа.
Недостатком известного способа являг ется наличие возмущающего момента.
Известен способ азимутального ориентирования на основе свойств свободного двухстепенного гироскопа.
К недостаткам известного способа следует отнести погрешность гирропределите- ля, вызванную возмущающим моментом по выходной оси.
Прототипом следует считать способ азимутального ориентирования на основе свойств гиротахометра.
К недостаткам данного способа следует отнести погрешность гйроопределителя,вы- званную возмущающим моментом относительно выходной оси.
Целью изобретения является повышение точности азимутального ориентирования, путем измерения погрешностей гиро- определителя,вызванных наличием возмущающего момента.
Указанная цель достигается порядком измерения информационных сигналов о положении ротора двухстепенного гироскопа в обратной вязи гиротахометра, разрывом обратной связи измерения информационных сигналов положения ротора свободного двухстепенного гироскопа.
Сущность изобретения заключается в измерений информационных сигналов положения ротора гиротахометраv разрыв обратной связи гиротахометра, измерения информационных сигналов о положении ротора свободного двухстепенного гироскопа.
Такое конструкторское решение позволяет измерить погрешность, вызванную возмущающим моментом, как установившийся угол поворота ротора двухстепенного гироскопа и учитывать эту погрешность при определении азимута в режиме гиротахометра. . .
Использование свободного двухстепенного гироскопа и гиротахометра в способах азимутального ориентирования известно:
NJ О
О
о о Јк
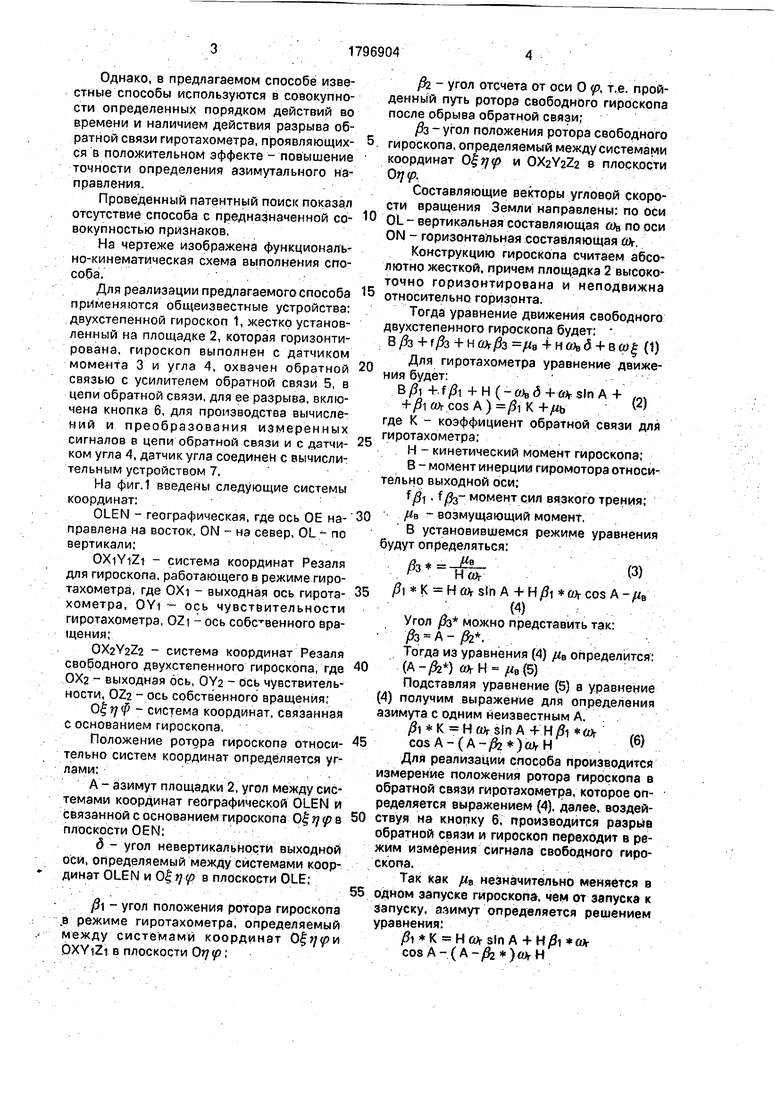
Однако, в предлагаемом способе известные способы используются в совокупности определенных порядком действий во времени и наличием действия разрыва обратной связи гиротахометра, проявляющихся & положительном эффекте - повышение точности определения азимутального направления.
Проведенный патентный поиск показал отсутствие способа с предназначенной совокупностью признаков.
На чертеже изображена функционально-кинематическая схема выполнения способа. . .
Для реализации предлагаемого способа применяются общеизвестные устройства: двухстепенной гироскоп 1, жестко установленный на площадке 2, которая горизонти- рована, гироскоп выполнен с датчиком момента 3 и угла 4, охвачен обратной связью с усилителем обратной связи 5, в цепи обратной связи, для ее разрыва, включена кнопка б, для производства вычислений и преобразования измеренных сигналов в цепи обратной связи и с датчиком угла 4, датчик угла соединен с вычислительным устройством 7.
На фиг.1 введены следующие системы координат::
OLEN - географическая, где ось ОЕ на- правлена на восток. ON - нэ север, по вертикали;
OXiYtZi - система координат Резаля для гироскопа, работающего в режиме гиротахометра, где OXi - выходная ось гиротахометра, OYi - ось чувствительности гиротахометра, OZi - ось собственного вращения;
OXaYaZa - система координат Резаля свободного двухстепенного гироскопа, где 0X2 - выходная ось, OYa - ось чувствительности, OZa - ось собственного вращения;
система координат, связанная с основанием гироскопа, :
Положение ротора гироскопа относительно систем координат определяется углами:..-..
А - азимут площадки 2, угол между системами координат географической OLEM и связанной с основанием гироскопа 0%ц р а плоскости OEM;
б - угол невертикальностй выходной оси, определяемый между системами координат OLEN и в плоскости OLE;
..- - угол положения ротора гироскопа .в режиме гиротахометра, определяемый между системами координат OXYiZi в плоскости От/ р
0
5
0
5
0
5
0
5
0
5
fa - угол отсчета от оси О р, т.е. пройденный путь ротора свободного гироскопа после обрыва обратной связи;
/Зз-угол положения ротора свободного гироскопа, определяемый между системами координат 0| tyyj и OXaYaZa в плоскости .
Составляющие векторы угловой скорости вращения Земли направлены: по оси OL - вертикальная составляющая 0)$ по оси ON - горизонтальная составляющая %-,
Конструкцию гироскопа считаем абсолютно жесткой, причем площадка 2 высокоточно горизонтирована и неподвижна относительно горизонта.
Тогда уравнение движения свободного двухстепенного гироскопа будет: В /Зз + fРЗ + н ед/Зз + н ah 5 + s w| (1)
Для гиротахометра уравнение движения будет: , +.f-/9i +H (-o d+fr slnA-f (. +PI Шг cos А ) 1 К +/% ( где К - коэффициент обратной связи для гиротахометра;
Н - кинетический момент гироскопа;
В - момент инерции гиромотора относительно выходной оси;
f Д|. f Bf момент сия вязкого трения;
fiB возмущающий момент,
В установившемся режиме уравнения будут определяться:
-HV
1 К Н (Or Sin А + H/3l (Or COS А -/,
.(4)
Угол fa можно представить так: /Зз А- #.
Тогда из уравнения (4) определится:
(А-уЙг) (От N 8 (5)
Подставляя уравнение (5) в уравнение (А) получим выражение для определения азимута с одним неизвестным А. .
/8i К Над-sin A а)г ,-, cosA-(A-#)
Для реализации способа производится измерение положения ротора гироскопа в обратной связи гиротахометра, которое определяется выражением (4), далее, воздействуя на кнопку 6, производится разрыв обратной связи и гироскоп переходит в режим измерения сигнала свободного гироскопа..
Так как fa незначительно меняется в одном запуске гироскопа, чем от запуска к Запуску, азимут определяется решением уравнения:
# К Н (Or sin A + Н# одcos А- ( A -fa )Ог Н.
Использование предлагаемого способа позволяет значительно повысить точность определений азимутального положения стабилизированной относительно горизонта площадки с помощью двухстепенного гироскопа за счет измерения возмущающего момента.
Ф о р м у л а и з о б р е т е н и я Способ определения азимута, основанный на измерении информационных сигналов о положении ротора двухстепенного гироскопа, работающего в режиме гирота- хометра. отличающийся тем, что, с целью повышения точности путем учета погрешности, вызванной возмущающим моментом, дополнительно измеряют информационные сигналы о положении ро
тора гироскопа, работающего в режиме свободного гироскопа, а азимут А определяют из выражения
К Н од slri A + Н аь cos А-()а)г Н, где Н - кинетический момент гироскопа;
ед горизонтальная составляющая уг ловой скорости вращения Земли;
К-коэффициент обратной связи;
j8.i - установившееся значение информационного сигнала о положении ротора ги- роскопа в режиме гиротахометра относительно оси отсчета;
fa - установившееся значение информационного сигнала о положении ротора свободного гироскопа относительно оси отсчета.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки систематической составляющей угловой скорости дрейфа поплавкового гироскопа | 2024 |
|
RU2829458C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2018 |
|
RU2700720C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ПРИРАЩЕНИЯМ УГЛА ПРЕЦЕССИИ ГИРОБЛОКА | 2012 |
|
RU2509289C2 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| Способ определения азимута трёхосного гиростабилизатора по углу поворота гироскопа | 2020 |
|
RU2729515C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по отклонению угла поворота гироскопа от расчётного значения | 2016 |
|
RU2649063C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по измерению угла поворота одного из гироскопов | 2023 |
|
RU2841320C2 |
Изобретение относится к измерительной технике и может быть использовано для азимутального ориентирования стабилизированных относительно горизонта площа2 док. Целью изобретения является повышение точности определения азимута путем учета погрешности, вызванной возмущающим моментом. После измерения информационных сигналов о положении ротора двухстепенного гироскопа, работающего в режиме гиротахометра, снимают эти сигналы после отключения обратной связи и работе прибора в режиме свободного гироскопа. Определение азимута производят по изложенной в описании формуле. V ИЛ, - - ..:.
| Назаров Б.И | |||
| и др | |||
| Командно-измерительные приборы | |||
| М.: Изд | |||
| МО СССР, 1987, с.536. |
