Изобретение относится к авиационной технике, в частности к системам управления торможения (СУТ), и предназначено для установки на маневренные летательные аппараты (ЛА).
Известна СУТ, в которой используются сигналы, пропорциональные частотам вращения нетормозного и тормозного колес, а также вычисляется коэффициент относительного проскальзывания S=(ωнт- ωт)/ωнт. Для регулирования объектов с экстремальной характеристикой, какими являются эластичные тормозные колеса, при непрерывном движении оптимальной области работы в результате изменения внешних возмущений или параметров внутреннего состояния объектов используется самонастраивающаяся система управления с поиском предельного значения коэффициента сцепления μсц. Жесткая программа в системе заменена поиском наивыгоднейших областей или режимов работы. СУТ реагирует на знак величины ∂ μсц/ ∂S, увеличивая или уменьшая тормозное давление для получения максимального качества работы системы. Однако данная СУТ не может быть использована в случае зацепления тормозным крюком за трос.
Известна система автоматического управления торможением колес самолета, которая содержит датчики угловых скоростей, установленных на колесах, каждый из которых снабжен тормозным устройством, блоком управления торможением колес, выход которого соединен со входами электрогидроприводов торможения. Однако в случае значительных боковых отклонений ЛА от осевой линии посадочной площадки аэрофинишер не обеспечивает эффективного торможения при зацеплении за трос. Эти отклонения появляются вследствие ошибок пилотирования, появления сложных метеоусловий и др. Летчик в момент зацепления крюка испытывает большую продольную перегрузку и не способен убрать боковые отклонения путем торможения колесами шасси, а также отключать силовую установку. Отсюда, при посадке ЛА на взлетно-посадочные полосы (ВПП) ограниченных (малых) размеров и под углом к оси ВПП возможно выкатывание ЛА за боковые границы. Посадка параллельно оси ВПП с боковым отклонением приводит к неравномерной (сверх расчетной) нагрузке на трос аэрофинишера, что вызывает его разрыв.
Цель изобретения повышение вероятности посадки ЛА на палубу корабля в сложных метеорологических условиях путем вывода его на ось посадочной площадки.
Поставленная цель достигается тем, что в системе управления торможением летательного аппарата при посадке на палубу корабля, содержащей два датчика угловых скоростей, установленных на колесах, каждый из которых снабжен тормозным устройством, блок управления торможением колес, выход которого соединен с входом первого электрогидропривода торможения, введены тормозной механизм крюков зацепления, трос аэрофинишера, блок включения питания, второй электрогидропривод торможения, два тензодатчика, два усилителя, сумматор, три компаратора, устройство управления дроссельным краном, выполненное в виде последовательно соединенных блока задержки, элемента НЕ, элемента И, электрогидропривода дроссельного крана и сумматора, второй вход которого соединен с ручкой управления двигателя, при этом блок управления торможением колес выполнен в виде четырех сумматоров, трех элементов И, генератора импульсов, ключевого элемента интегратора, блока дифференцирования, формирователя сигнала, соответствующего скорости свободнокатящегося колеса, и двух блоков реле, при этом выходы первого и второго датчиков угловых скоростей соединены соответственно с первым и вторым входами первого сумматора блока управления торможением колес и первым и вторым входами формирователя сигнала, соответствующего скорости свободнокатящегося колеса, выход которого соединен с первыми входами второго и третьего сумматоров блока управления торможением колес, вторые входы которых соединены с выходом первого сумматора, который через блок дифференцирования соединен с первым входом четвертого сумматора блока управления торможением колес, выход второго сумматора через первый блок реле соединен с первым входом ключевого элемента, выход третьего сумматора соединен с первым входом второго блока реле, второй вход которого
соединен с выходом формирователя скорости свободного колеса, выход второго блока реле соединен с вторым входом четвертого сумматора, выход которого соединен с первым входом интегратора, выход которого соединен с вторым входом ключевого элемента, выход которого соединен с первыми входами первого и второго элементов И блока управления торможением колес, второй вход первого элемента И соединен с выходом первого компаратора, второй вход второго элемента И соединен с выходом второго компаратора, выход третьего компаратора соединен с третьими входами первого и второго элементов И, первым входом третьего элемента И блока управления торможением колес и входом блока задержки устройства управления дроссельным краном, второй вход элемента И которого соединен с блоком включения питания, который соединен с входом генератора импульсов, выход которого соединен с вторым входом третьего элемента И, выход которого соединен с вторым входом интегратора, выход первого тензодатчика через первый усилитель соединен с первыми входами сумматора, первого и второго компараторов, выход второго тензодатчика через второй усилитель соединен с вторыми входами сумматора, первого и второго компараторов, выход сумматора соединен с входом третьего компаратора, при этом выходы первого и второго элементов И блока управления торможением колес соединены соответственно с первым и вторым электрогидроприводом торможения, каждый из которых соединен с тормозным устройством колес, причем тормозной механизм крюка зацепления выполнен в виде симметричных тормозных крюков, скрепленных единой осью, гидроцилиндра выпуска тормозных крюков и демпфера колебаний, при этом внутренний шарнир тормозного механизма соединен с гидроцилиндром выпуска тормозных крюков и демпфером колебаний, на внешней поверхности симметричных тормозных крюков установлены тензодатчики, а выход блока питания соединен с гидроцилиндром выпуска тормозных крюков.
На чертеже приведена принципиальная схема системы автоматического торможения, где обозначены: 1, 2 датчики угловой скорости (ДУС), правый и левый; 3, 4 колеса основных стоек шасси; 5, 6 тормозные устройства колес; 7, 8 первый и второй электрогидроприводы; 9-11 первый, второй и третий элементы И; 12 блок управления торможением колес; 13-16 первый, второй, третий и четвертый сумматоры блока управления торможением колес; 17 дифференцирующее звено; 18 интегратор; 19 ключевой элемент; 20 генератор; 21 формирователь сигнала, соответствующего скорости свободнокатящегося колеса; 22 первый блок реле; 23 второй блок реле; 24, 25 первый и второй тензодатчики; 26, 27 первый и второй усилители; 28-30 первый, второй и третий компараторы; 31 блок задержки; 32 элемент НЕ; 33 четвертый элемент И; 34 электрогидропривод дроссельного крана; 35 первый сумматор; 36 дроссельный кран двигателей; 37 второй сумматор; 38 блок включения питания; 39 втулка; 40 демпфирующее колебание; 41 гидроцилиндр выпуска тормозных крюков; 42 трос аэрофинишера; 43 тормозной механизм крюков зацепления; 44, 45 два тормозных крюка зацепления, скрепленных единой осью.
Система работает следующим образом.
За несколько секунд до посадки на воздушном участке траектории летчик включает блок 38 для выпуска крюка 44-45 посредством гидроцилиндра 41. После этого включает на максимальное значение тягу двигателей с тем, чтобы при неудачном заходе и приземлении уйти на второй круг с такой тягой. При зацеплении крюка за трос 42 с неравными плечами в половинах крюка вызываются неравные изгибающие силы, которые воспринимаются тензодатчиком 24 и 25, сигналы которых усиливаются на блоках 26, 27 и подаются на сумматор 37 и компаратор 29. После сравнения с установленным напряжением И компаратор 29 выдает сигнал на элемент И 11 для запуска генератора импульсов 20, сигналы которого, пройдя блоки 18 и 19, поступают на элементы И 9, 10 и на электроприводы 7, 8 тормозных устройств 5, 6 колес 2, 4. САТ строится на основе использования тахогенераторов ДУСов 1, 2, дифференцирующего 17 и интегрирующего 18 устройств с цепями коррекции, а также электрогидроприводов 7, 8. В контуре управления подстройка давления происходит по интегральному закону в зависимости от рассогласования ДУСов 1, 2. Контур 13-17-16-18-19 обеспечивает подстройку тормозного давления в соответствии с моментом сцепления колес. Пройдя интегратор 18 сигналы достигают значения, при котором срабатывает ключевой элемент 19', подающий сигнал для включения электрогидроприводов 7, 8 для растормаживания колес 3 и 4. При этом тормозной момент начинает уменьшаться, а угловая скорость ωт колеса увеличивается. Для плавного увеличения интенсивности торможения в зависимости от длины пробега и с учетом уменьшения износа пневматиков используется генератор импульсов 20. Генератор осуществляет скользящий режим работы тормозных устройств 5 и 6 и посылает импульсы на элемент И 11, на другой вход которой поступают импульсы с компаратора 29. Сигналы со схемы И 11 поступают на второй вход интегратора 18. Таким образом контур 13-17-16-18-19 обеспечивает подстройку уровня тормозного давления в соответствии с располагаемым моментом сцепления. Инерционность исполнительных агрегатов 7, 8 требует использования в системе нелинейного преобразователя ошибки системы по скорости. Для этого параллельно данному каналу включен канал 21-22-19, реагирующий на снижение скорости колеса и срабатывающий при повышении фиксированного проскальзывания Sдо, осуществляющий защиту от юза, когда быстродействие канала недостаточно. Т.к. САТ относится к экстремальным системам с запаздыванием, то путем введения компенсации запаздывания можно уменьшить колебания в системе включением релейных блоков 22 и 23. Для повышения точности реализации зависимости μf(V) требуется введение нелинейного блока 2-х переменных блока 22. Формирователь сигнала, соответствующего скорости свободного колеса 21, выдается сигнал ωпк, который подается на 2 сумматора 14 и 15, где организуетсяωнк Δ ωт ωт и далее подается на блоки реле 22 и 23. На блок 22 2-х переменных подается еще ωнк с блока 21. С помощью нелинейного блока 22 осуществляется связь напряжения на блоке 18 с положением рабочей точки на характеристике сцепления. Если она находится на левом склоне кривой μ (S), то интегратор заряжается и давление увеличивается, если на левой то интегратор разряжается. Если скольжением S превышается значение И2, срабатывает блок 23 и сигнал на входе электрогидроприводов 7, 8 обнуляется, что приводит к быстрому растормаживанию колес. Суммарный сигнал ускорений колес И, поступающий на вход интегратора 18, повышает динамические свойства САТ за счет компенсации инерционностей. Другой сигнал с блока включения 38 подается на элемент И 33 для подготовки схемы автоматики выключения двигателей ЛА (37-28-30, 31, 32, 33-35). Сигналы с тензодатчиков 24 и 25, воспринимающие боковые составляющие сил на половинах крюка, поступают в усилители 26 и 27 и далее на компараторы 28 и 30. При сравнении сигналов при равноплечих концах троса и равенстве усилий в них с компаратора 29 и далее соединенных с ним блока задержки 31, "НЕ" 32, элемента И 33 будет выдаваться сигнал на отключение двигателей ЛА. Элемент задержки 31 не позволяет реагировать на крутые передние фронты, а дает возможность согласовать настройку компаратора 29. Сигнал с компаратора 29 подается на электрогидравлический привод 36 и на дроссельный кран двигателей 36 подачи топлива. Другой сигнал с компаратора 29 подается на элемент И 11 для включения генератора импульсов 20, управляющего работой интегратора 18. Процесс посадки ЛА на палубу корабля как обязательный элемент включает уход на второй круг, который вследствие ограниченности полосы сопряжен с большими трудностями. Поэтому за несколько секунд до касания троса при полете ЛА на воздушном участке траектории летчик включает тягу двигателей на максимальное значение с тем, чтобы при неудачной посадке уйти на второй круг с максимальной тягой. Отключать двигатели необходимо во время пробега после зацепления за трос, когда развивается большое значение продольной перегрузки nх и летчик находится в условиях повышенной психологической нагрузки.
Изобретение относится к авиационной технике, в частности к системам управления торможения, и предназначено для установки на маневренные летательные аппараты. Цель изобретения - повышение вероятности посадки летательного аппарата на палубу корабля в сложных метеорологических условиях путем вывода его на ось посадочной площадки. Для этого в систему вводят тормозной механизм крюков зацепления 43, трос аэрофинишера 42, блок включения питания 38, второй электрогидропривод торможения, два тензодатчика 24, 25, два усилителя 26, 27, сумматор 37, три компаратора 28 30. Устройство управления дроссельным краном, выполненное в виде блока задержки 31, элемента НЕ 32, элемента И 33, электрогидропривода дроссельного крана 34 и сумматора 35. При этом блок управления торможением колес 12 выполнен в виде четырех сумматоров 13 16, трех элементов И 9 11, генератора импульсов 20, ключевого элемента 19, интегратора 18, блока дифференцирования 17, формирователя сигнала, соответствующего скорости свободнокатящегося колеса 21 и двух блоков реле 22 и 23, причем тормозной механизм зацепления выполнен в виде двух симметричных тормозных крюков 44, 45, скрепленных единой осью, гидроцилиндра выпуска тормозных крюков 41, демпфера колебаний 40. 1 ил.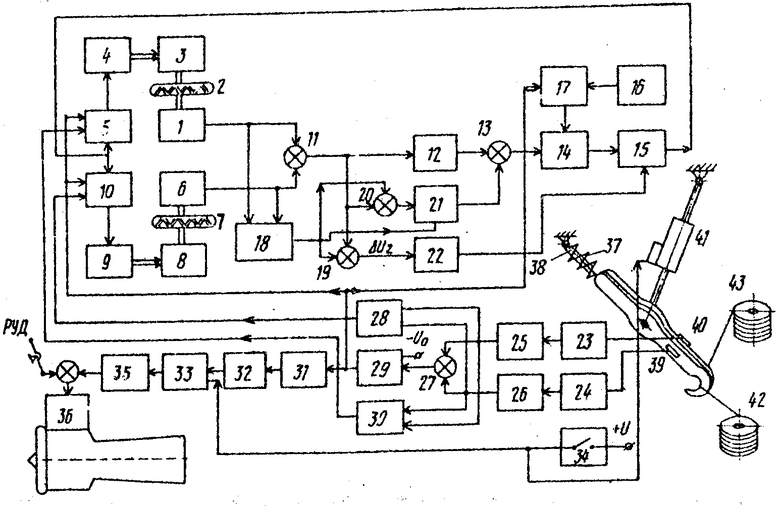
СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ, содержащая два датчика угловых скоростей, установленных на колесах, каждый из которых снабжен тормозным устройством, блок управления торможением колес, выход которого соединен с входом первого электрогидропривода торможения, отличающаяся тем, что, с целью повышения вероятности посадки летательного аппарата на палубу корабля в сложных метеорологических условиях путем вывода его на ось посадочной площадки, в систему введены тормозной механизм крюков зацепления, трос аэрофинишира, блок включения питания, второй электрогидропривод торможения, два тензодатчика, два усилителя, сумматор, три компаратора, устройство управления дроссельным краном, выполненное в виде последовательно соединенных блока задержки, элемента НЕ, элемента И, электрогидропривода дроссельного крана и сумматора, второй вход которого соединен с ручкой управления двигателя, при этом блок управления торможением колес выполнен в виде четырех сумматоров, трех элементов И, генератора импульсов, ключевого элемента, интегратора, блока дифференцирования, формирователя сигнала, соответствующего свободнокатящегося колеса и двух блоков реле, при этом выходы первого и второго датчиков угловых скоростей соединены соответственно с первым и вторым входами первого сумматора блока управления торможением колес и первым и вторым входами формирователя сигнала, соответствующего скорости и свободнокатящегося колеса, выход которого соединен с первыми входами второго и третьего сумматоров блока управления торможением колес, вторые входы которых соединены с выходом первого сумматора, который через блок дифференцирования соединен с первым входом четвертого сумматора блока управления торможением колес, выход второго сумматора через первый блок реле соединен с первым входом ключевого элемента, выход третьего сумматора соединен с первым входом второго блока реле, второй вход которого соединен с выходом формирователя скорости свободного колеса, выход второго блока реле соединен с вторым входом четвертого сумматора, выход которого соединен с первым входом интегратора, выход которого соединен с вторым входом ключевого элемента, выход которого соединен с первыми входами первого и второго элемента И блока управления торможением колес, второй вход первого элемента И соединен с выходом первого компаратора, второй вход второго элемента И соединен с выходом второго компаратора, выход третьего компаратора соединен с третьими входами первого и второго элементов И, первым входом третьего элемента И блока управления торможением колес и входом блока задержки устройства управления дроссельным краном, второй вход элемента И которого соединен с блоком включения питания, который соединен с входом генератора импульсов, выход которого соединен с вторым входом третьего элемента И, выход которого соединен с вторым входом интегратора, выход первого тензодатчика через первый усилитель соединен с первыми входами сумматора, первого и второго компараторов, выход второго пьезодатчика через второй усилитель соединен с вторыми входами сумматора, первого и второго компараторов, выход сумматора соединен с входом третьего компаратора, при этом выходы первого и второго элемента И блока управления торможением колес соединены соответственно с первым и вторым электрогидроприводом торможения, каждый из которых соединен с тормозным устройством колес, причем тормозной механизм зацепления выполнен в виде двух симметричных тормозных крюков, скрепленных единой осью, гидроцилиндра выпуска тормозных крюков и демпфера колебаний, при этом внутренний шарнир тормозного механизма соединен с гидроцилиндром выпуска тормозных крюков и демпфером колебаний, при этом на внешней поверхности симметричных тормозных крюков установлены тензодатчики, а выход блока питания соединен с гидроцилиндром выпуска тормозных крюков.
| Авторское свидетельство СССР N 343545, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
