Область техники, к которой относится изобретение
Изобретение относится к авиационной технике, а точнее к способам и устройствам осуществления посадки беспилотного летательного аппарата (БПЛА) самолетного типа вне стационарных аэродромов с ВПП.
Уровень техники
С 70-х годов XX века произошел существенный рост количества используемых беспилотных комплексов в ряде отраслей народного хозяйства различных стран (США, Израиль, ФРГ, Канада и др.), особенно в военной сфере, а также повысилось качество результатов их применения. Достигнутый к настоящему времени уровень безаварийности выполнения взлетно-посадочных режимов у самолетов-беспилотников с обычным колесным шасси (колесных БПЛА), составляющий 95-97% и выше при посадке на искусственные взлетно-посадочные полосы (ВПП), позволил повысить в целом эффективность использования таких самолетных комплексов. Но особенно бурный количественный рост в текущем десятилетии произошел в сегменте тактических беспилотников, приспособленных к выполнению взлета и посадки без использования ВПП. Большинство самых легких аппаратов этого сегмента запускаются броском руки, садятся либо на парашюте, либо на корпус (на лыжу). Более тяжелые беспилотники запускают с катапульты, а посадку они также производят либо с помощью парашюта, либо на корпус. Но полученный на практике уровень аварийности для указанных способов посадки оказался заметно выше, чем для типового способа посадки на ВПП. Поэтому в странах-лидерах в области создания БПЛА (США, Израиль) проводятся работы по совершенствованию известных и разработке новых способов посадки беспилотников вне аэродромов, обладающих улучшенными эксплуатационными свойствами. Например, в США указанное направление развития авиационной техники поддерживается в целевой программе STUAS (Small Tactical Unmanned Aircraft System).
В настоящее время существует и даже практически применяется ряд образцов беспилотников, которые запускаются с помощью катапульты, а посадку производят на специальные наземные или корабельные системы - аэрофинишеры. По взлетно-посадочным свойствам эти БПЛА удобно классифицировать как катапультно-аэрофинишерные. Именно к такому классу объектов относится изложенное далее изобретение.
Один из созданных в соответствии с концепцией программы STUAS легкий беспилотный авиационный комплекс (www.naval-technology com/projects/scaneagle-uav) включает два оригинальных сопрягаемых на посадочном режиме объекта - летательный аппарат со специфической компоновкой, названный ScanEagle, и посадочное устройство, названное SkyHook. Новая совокупность реализованных в этих объектах технических решений защищена патентом US 7,175,135 В2 от 13 февраля 2007 года. Основные операции на этапе посадки в соответствии с предложениями этого патента состоят в следующем. Летательный аппарат со стреловидным крылом наводится на вертикально свешивающийся с высоты порядка 15 м трос, и в результате их взаимодействия трос соскальзывает по передней кромке крыла в один из замков на концах крыльев. (Термином «трос» в настоящем описании обозначается гибкая механическая связь, физическим воплощением которой может быть канат, шнур, жгут, нить, веревка и т.п.) В замке трос фиксируется и затем кинетическая энергия беспилотника поглощается в процессе его связанного движения на аэрофинишере SkyHook. Так как при таком способе завершения полета на аэрофинишере на переднюю кромку крыла возложена дополнительная функция - выдержать удар по тросу и быть направляющей в захватном устройстве, то это требует повышения запаса прочности крыла и, следовательно, увеличения веса, что приводит к уменьшению относительной доли полезной нагрузки. Из 18 кг взлетного веса ScanEagle только 6 кг составляют вес топлива и целевого оборудования (т.е. 33%), тогда как у другого современного беспилотника с колесным шасси RQ-7 Shadow (www.airwar.ru/enc/bpla/rq7.html) при взлетном весе 149 кг на топливо приходится около 74 кг и на целевую нагрузку 25 кг (т.е. суммарно 66%). Таким образом, «платой» за способность штатной посадки ScanEagle вне ВПП является понижение коэффициента весовой отдачи его конструкции по сравнению с уровнем, свойственным обычным сухопутным самолетам.
Кроме указанного в предыдущем абзаце свойства системы типа «ScanEagle+Sky-Hook» иметь у летательного аппарата пониженный уровень весовой отдачи конструкции, в процессе эксплуатации этой системы посадки, так же как и системы улавливания БПЛА в натянутую близко к вертикальной плоскости сеть, выявлен еще целый ряд недостатков, перечисленных, например, в описании к патенту US 7,410,125 В2 от 12 августа 2008 года. Дополнительно к риску повреждения конструкции беспилотника в момент зацепления контактирующими с ним элементами систем захвата, еще одна группа недостатков проявилась при выполнении швартовочных операций. Объект, который, в общем-то, требует бережного обращения, удерживается после посадки на длинной гибкой слабо контролируемой связи, часто в условиях неспокойной внешней среды (сильный порывистый ветер, качка корабля). То есть этим аэрофинишерным системам свойственна слабая защищенность БПЛА после посадки от соударений с элементами наземных (корабельных) конструкций. В качестве средства преодоления выявленных недостатков у применяемых систем внеаэродромной посадки беспилотников в патенте US 7,410,125 В2 предложено использовать роботизированную систему, у которой устройство захвата БПЛА является специализированным рабочим органом манипулятора. Это устройство захвата имеет U-образную форму, между верхними свободными концами балок (силовых элементов) которого натянут приемный трос, а в основании смонтирована система торможения указанного троса и приемная площадка в виде пола из жесткого пластика или металлической сетки. В хвостовой части беспилотника снизу размещается устройство зацепления за трос в виде выступающего гака. В процессе захода БПЛА на посадку приемный трос наводится манипулятором на этот гак. После зацепления гака за приемный трос торможение летательного аппарата производится подобно торможению приземлившихся палубных самолетов, с той разницей, что траектория движения криволинейна и нет опоры на палубу, а в конце тормозного участка беспилотник улавливается на приемную площадку у основания U-образного захвата, где и фиксируется с помощью специальных замков.
По совокупности ряда функциональных признаков технические решения патента US 7,410,125 В2 наиболее близки к предложенным автором вариантам решения целевой задачи, а именно - обеспечению мягкой посадки БПЛА на аэрофинишер. Поэтому предложенный в этом патенте способ посадки и некоторые элементы вспомогательных устройств для него выбраны в качестве прототипа к настоящему изобретению.
В описании прототипа указывается, что он ориентирован на применение небольших БПЛА весом до 300 фунтов (≈136 кг), номинально - 100 фунтов (45.36 кг), и с посадочным диапазоном скоростей 3÷60 миль/час (т.е. до 111 км/час ≈308 м/с). Понятно, что для поглощения кинетической энергии более тяжелых и высокоскоростных беспилотников потребуется увеличивать потребляемую мощность и габариты манипулятора, причем это увеличение происходит по нелинейному закону, что может быть технически и экономически приемлемым только до определенного предела. Далее, в прототипе идея использования манипулятора, особенно на корабле, обосновывается потребностью противодействия вынужденному движению основания, на котором установлен манипулятор, и/или случайным отклонениям от номинальной посадочной траектории полета беспилотника. Получается, что для достижения одной конечной цели - приведения БПЛА и зацепляемого участка приемного троса в область захвата - применяются две активно управляемые механические системы - сам беспилотник и манипулятор. Причем роль управляющих воздействий второй системы - манипулятора - после момента зацепления на заключительном участке повышается по мере того, как уменьшается скорость беспилотника, и его угловая ориентация уже не может устойчиво обеспечиваться с помощью аэродинамических органов управления. В условиях воздействия сильных внешних возмущений, например порывистого ветра, задача «улавливания» слабо контролируемого БПЛА на приемную площадку у основания U-образного захвата определяет достаточно высокие требования к динамическим характеристикам манипулятора. Если такие требования из-за каких-либо ограничений, например по мощности привода, не удастся удовлетворить, то это может существенно повлиять на уровень аварийности посадки БПЛА на описанный роботизированный аэрофинишер.
В патентах RU 1837038 от 30.08.1990 и RU 2235045 от 05.02 2003 предлагается концы приемного троса соединить с выходными штоками воздушно-гидравлических амортизаторов, которые шарнирно закреплены на верхних концах двух достаточно мощных вертикально поднятых высоких опор (мачт). Захватное устройство самолета в описании к патенту RU 2235045 предлагается разместить в верхней части фюзеляжа с поперечной осью вращения позади центра тяжести и на посадочном режиме поднимать его в определенное рабочее положение над фюзеляжем гаком вверх. Поэтому для того чтобы произошло зацепление, летательный аппарат должен достаточно точно пролететь снизу под натянутым тросом. После зацепления за середину натянутого троса точка захвата смещается по направлению вектора скорости самолета, трос начинает двигаться и частично вытягивает штоки тормозных амортизаторов, увеличивая тем самым длину подвеса, а повисший на тросе самолет начинает совершать движение, подобное движению физического маятника. По оценкам автора патента RU 2235045, потенциально на такой аэрофинишер может производить посадку тяжелый скоростной самолет, но для этого требуется натянуть трос на высоте не меньше, чем длина тормозного пути у данного типа самолета. Как известно, в первом приближении длина тормозного пути прямо пропорциональна квадрату посадочной скорости и обратно пропорциональна перегрузке, с которой производится торможение. Указывается, что при длине тормозного пути 40÷65 м требуется натянуть трос на высоте 60 м и использовать в качестве тормозных устройств другую пару гидроцилиндров, управляющих поворотом силовых опорных стоек аэрофинишера в плоскости его симметрии. Таким образом, «платой» за увеличение веса и посадочной скорости принимаемого самолета на рассматриваемом варианте аэрофинишера является увеличение вертикального размера наземной конструкции, что с позиций удобства эксплуатации не всегда приемлемо.
Технические ограничения в части осуществления посадочных режимов (фактически реализуемые или планируемые в соответствии с опубликованными патентами применительно к рассматриваемому классу БПЛА) можно свести в следующий перечень:
А. Ограничение по прочности конструкции, требуемое для обеспечения безаварийности посадочных режимов у катапультно-аэрофинишерных БПЛА при их посадке на вертикально свешенный трос или в сеть, приводит к относительному утяжелению таких аппаратов (по сравнению с сопоставимыми по назначению БПЛА, имеющими обычное колесное шасси);
В. Ограничение по посадочной скорости является эффективным средством снижения до приемлемого уровня нагрузок на конструкцию как БПЛА, так и аэрофинишера, поэтому у известных катапультно-аэрофинишерных БПЛА указанное ограничение задается величиной порядка 30 м/с, но это ограничение обычно влечет за собой и ограничение крейсерской и максимальной скоростей полета самолета;
С. Подъем в вертикальное положение в полевых условиях мощных высоких стоек аэрофинишера, необходимый для осуществления посадки в соответствии с ранее опубликованными изобретениями для самолетов с длинным тормозным путем, сопряжен с определенными эксплуатационными трудностями и поэтому малоперспективен.
В отношении эксплуатируемых пилотируемых и беспилотных самолетов с различными типами конструкций шасси необходимо отметить следующее. У самолетов (современных и признанных удачными) с убирающимся колесным шасси весовая доля этого взлетно-посадочного устройства составляет до 4÷6% от массы его конструкции (Житомирский Г.И. Конструкция самолетов. М.: Машиностроение, 2005, стр.240). У самолетов палубного базирования суммарная доля весовых затрат на обеспечение посадки заметно выше - до 7%, так как условия эксплуатации палубных самолетов считаются наиболее жесткими и сопряжены с необходимостью поглощения более высоких вертикальных скоростей и нагрузок в момент посадки, чем это свойственно условиям эксплуатации большинства сухопутных самолетов. Неубирающееся шасси проще и легче, но его влияние на понижение весовой эффективности самолетов (через повышенное аэродинамическое сопротивление и определяемый этой причиной дополнительный расход топлива), как правило, больше, чем вышеупомянутые 4÷6%. Поэтому идеальной (с позиций весовой эффективности конструкции летательного аппарата) ситуацией было бы избавление от шасси сразу после взлета и обретение его вновь непосредственно перед посадкой. Потенциально комбинация «катапульта + аэрофинишер» позволяет приблизиться к такому идеалу. Но если сопряжение БПЛА с катапультой осуществляется, как правило, через силовые узлы, непосредственно замыкающиеся на фюзеляж или центроплан (основные несущие элементы конструктивно-силовой схемы самолета), и не требует дополнительно заметных весовых затрат, то сопряжение БПЛА с известными аэрофинишерными системами пока далеко от указанного идеала. Например, хотя в конструкции уже упоминавшегося беспилотника ScanEagle формально нет шасси, но затраты веса на упрочнение передней кромки крыла, совершенно не нужные для обеспечения самого полета как такового, существенно превосходят долю веса обычного шасси. Для БПЛА, приспособленных к посадке в сеть, также требуется либо дополнительное усиление конструкции, сопоставимое с весом шасси, либо применение специализированных плавно нагружаемых при посадке стреловидных компоновок, не оптимальных по критерию «аэродинамическое качество - вес летательного аппарата».
У прототипа изобретения «платой» за возможность выполнения посадки вне аэродрома является сравнительно сложная роботизированная конструкция аэрофинишера и ограничения по весу и посадочной скорости принимаемых беспилотников.
Раскрытие изобретения
Основной целью предложенного изобретения является создание для катапультно-аэрофинишерных БПЛА удобного в эксплуатации способа посадки, базирующегося на применении новой совокупности технических решений в схемах конструкций беспилотников и аэрофинишеров. Изобретение ориентировано на получение следующих технических результатов:
1. Повышение эффективности конструкции БПЛА (коэффициента весовой отдачи) по сравнению с современными эксплуатируемыми образцами (у прототипа этот результат распространен только на класс легких беспилотников);
2. Улучшение удельных показателей эффективности конструкции аэрофинишеров (в частности, снижение веса и энергопотребления по сравнению с характеристиками прототипа);
3. Улучшение условий нагружения крыльев в процессе торможения БПЛА на аэрофинишере;
4. Минимизация размеров аэрофинишера.
В заявленном изобретении перечисленные технические эффекты достигаются за счет того, что:
а). Механическую часть бортового посадочного комплекса конкретного типа самолета формируют в виде протяженной захватывающей системы, точку приложения момента сил от которой на конструкцию БПЛА располагают в плоскости его симметрии позади центра тяжести, причем для заданного диапазона скоростей захода на посадку в допустимых условиях эксплуатации самолета характеристики этой системы (длина, вес, несущие свойства и аэродинамическое сопротивление) определяют так, чтобы ширина заметаемой поводком гака полосы захвата была не меньше точности управления по высоте траекторией полета, а гибкую захватывающую систему выдвигают из убранного положения в рабочее положение перед выполнением посадки;
б). Приемный трос первого каскада аэрофинишера натягивают между двумя мачтами (преимущественно горизонтально) на высоте над прилегающей к аэрофинишеру поверхностью большей суммы номинального приращения высоты при выполнении заданного маневра подъема на восходящую глиссаду (заданного маневра перехода на пологое кабрирование) и величины точности управления самолетом по высоте,
в). Аэрофинишер располагают преимущественно так, чтобы его вертикальная осевая плоскость была параллельна направлению ветра, а заход на посадку выполнялся против ветра, но если по каким-либо причинам это невозможно, то ось первого каскада ориентируют по выбранному направлению захода, а расположение второго каскада относительно первого подстраивают с учетом силы и направления ветра (если размеры второго каскада выбраны без запаса на компенсацию ветровых возмущений),
г). Второй каскад аэрофинишера располагают относительно первого так, чтобы граница рабочей области второго каскада охватывала область допустимых конечных состояний БПЛА, в которой он оказывается после торможения на первом каскаде,
д). Заход на посадку выполняют преимущественно в плоскости симметрии аэрофинишера и сначала производят снижение беспилотника до безопасной высоты, а потом перед аэрофинишером переводят его траекторию в режим набора высоты причем так, чтобы расположенная снизу БПЛА захватывающая система попала на приемный трос первого каскада аэрофинишера на этой восходящей ветви траектории,
е). После захвата приемного троса устройством зацепления на БПЛА автоматически выключают воздушный движитель и одновременно на первом каскаде аэрофинишера запускают автоматическое регулирование выпуска нагруженного приемного троса, посредством чего осуществляют поглощение подавляющей части кинетической энергии беспилотника с помощью сосредоточенного силового воздействия на основные несущие элементы его конструктивно-силовой схемы,
ж). После момента зацепления приемного троса включают механизм поворота крыльев (если БПЛА оснащен таким механизмом) во второе рабочее положение, в котором обеспечиваются более благоприятные условия их нагружения в процессе торможения по сравнению с положением в полетной конфигурации,
з). На втором каскаде аэрофинишера торможение БПЛА до полной остановки производят преимущественно за счет распределенного (рассредоточенного) неповреждающего тормозящего воздействия на его поверхность либо с помощью специализированных демпфирующих устройств (например, воздушной подушки или упругой сети), либо за счет погружения в вязкую среду.
Сущность предложенных решений изобретения поясняется следующими чертежами:
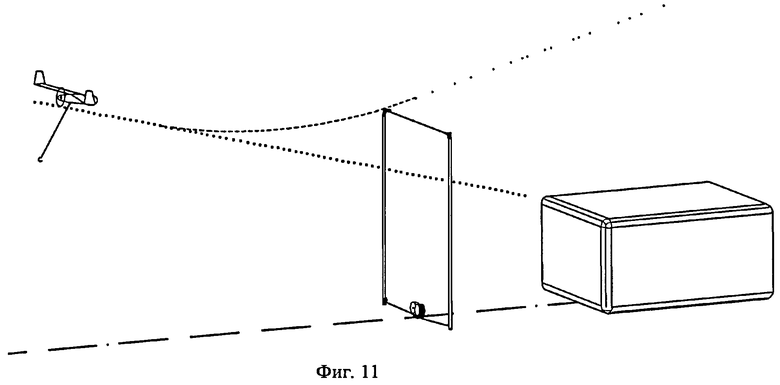
На фиг.1 схематично изображен двухкаскадный аэрофинишер, и на фоне аэрофинишера показана типовая траектория движения БПЛА на посадочном режиме.
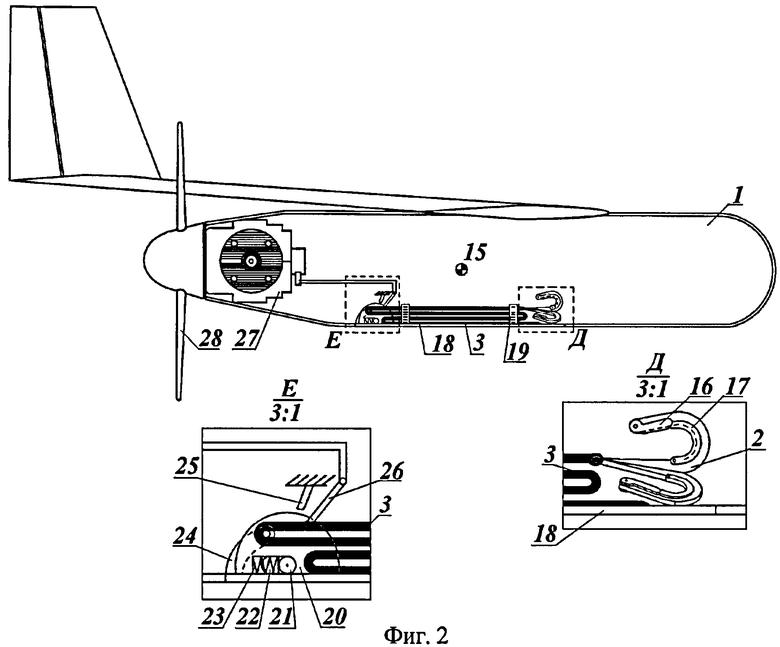
На фиг.2 схематично изображен один из возможных вариантов компоновки на БПЛА захватывающей системы, находящейся в убранном положении.
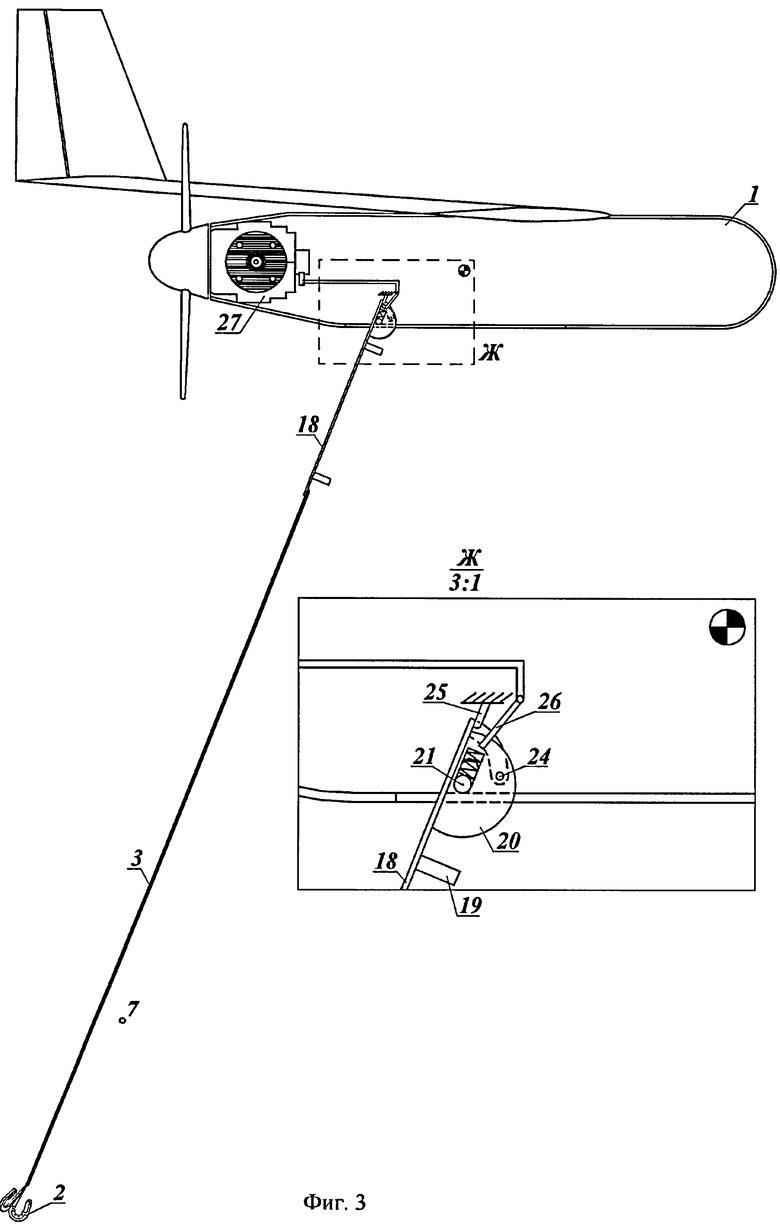
На фиг.3 показана захватывающая система в выпущенном взведенном состоянии перед ее контактом с приемным тросом аэрофинишера.
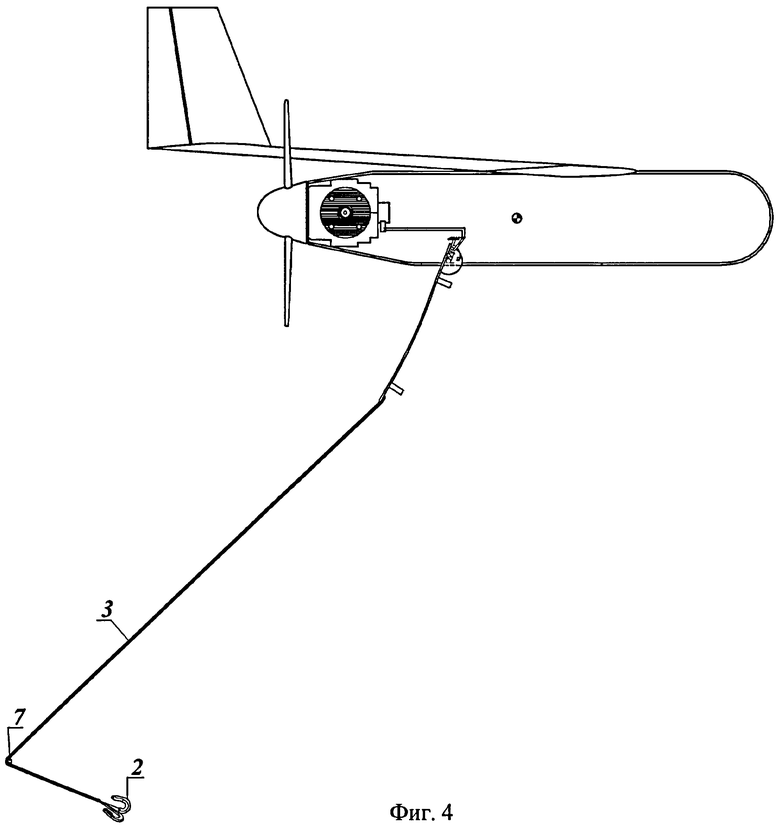
На фиг.4 показана фаза захлестывания поводком захватывающей системы БПЛА приемного троса аэрофинишера.
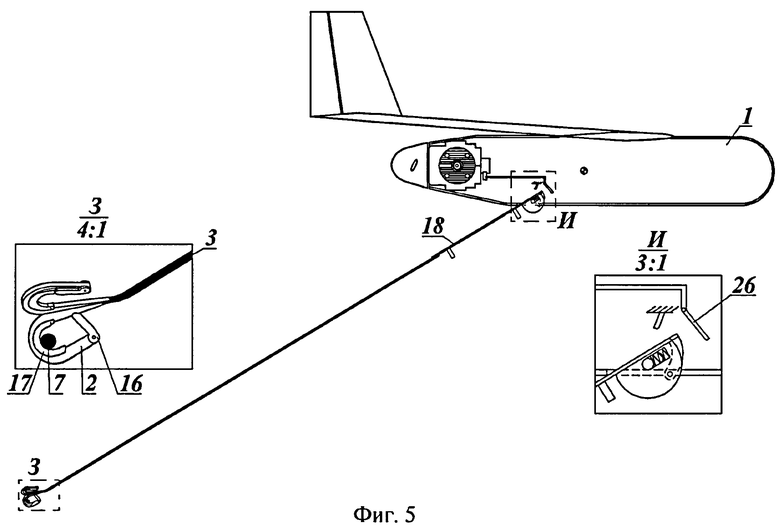
На фиг.5 изображено зацепление приемного троса аэрофинишера кошкой захватывающей системы БПЛА и выключение маршевой силовой установки.
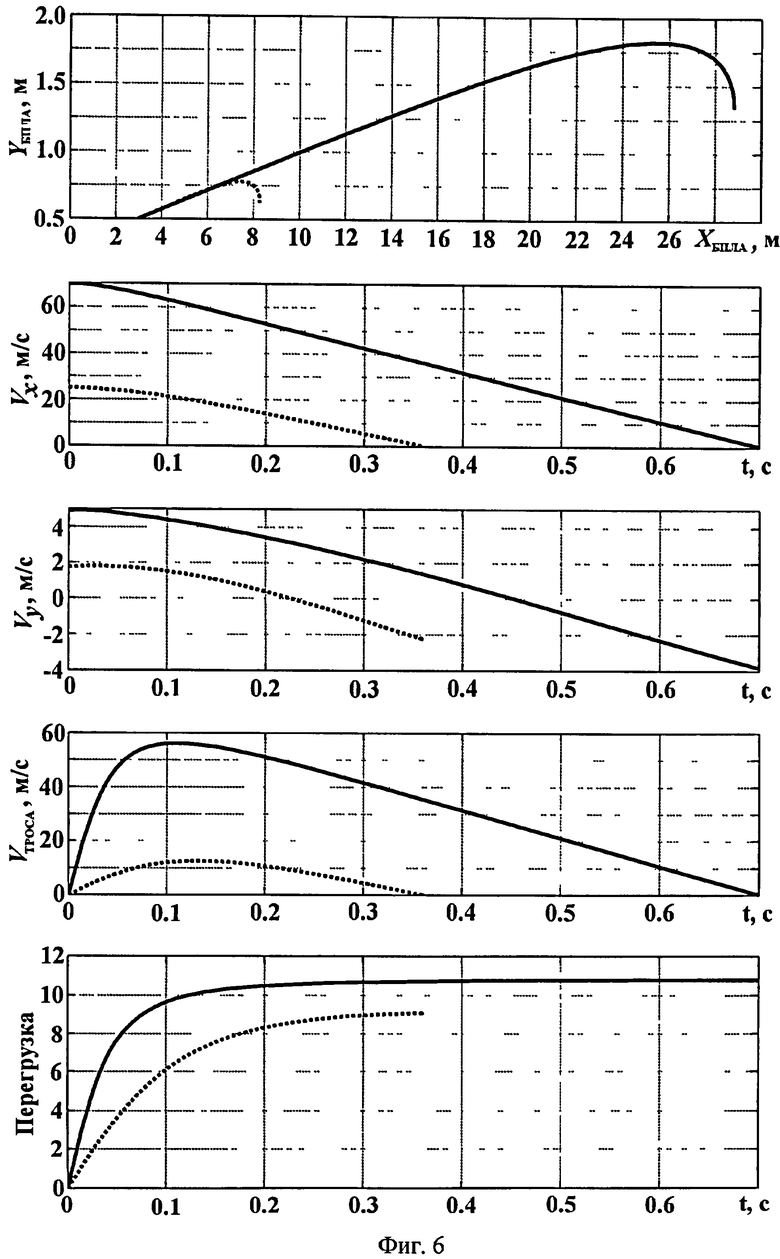
На фиг.6 для двух БПЛА, с отличающимися посадочными скоростями V1=25 м/с=90 км/час (пунктирная линия графиков) и V2=70 м/с=252 км/час (сплошная линия графиков), приведены характерные изменения параметров движения на первом каскаде аэрофинишера.
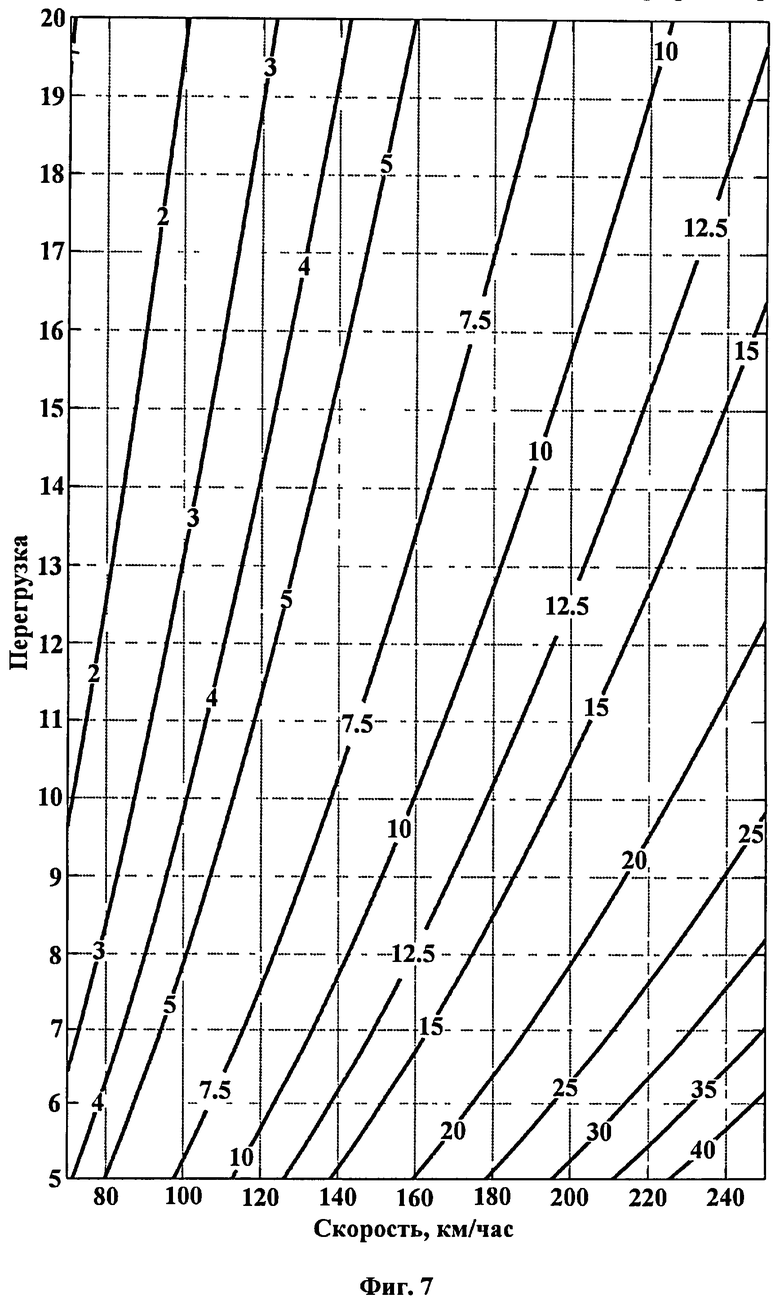
На фиг.7 показаны характерные зависимости между горизонтальной компонентой посадочной скорости БПЛА, продольной перегрузкой и соответствующим горизонтальным перемещением беспилотника на первом каскаде аэрофинишера.
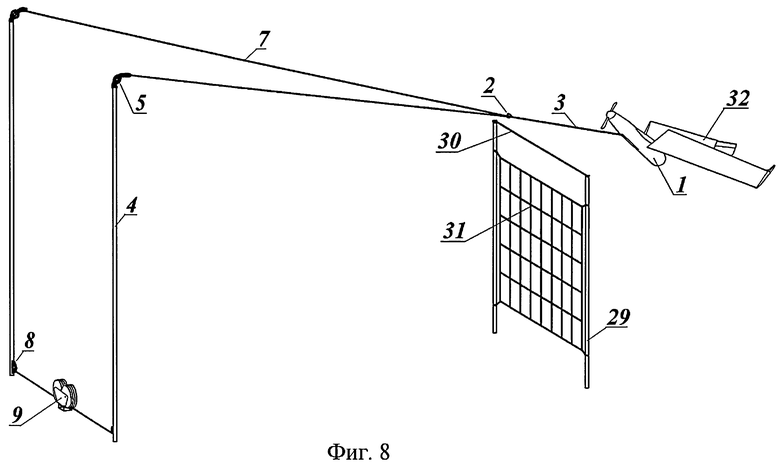
На фиг.8 изображено характерное состояние посадочной системы в момент перехода БПЛА в конфигурации с повернутыми крыльями на второй каскад аэрофинишера.
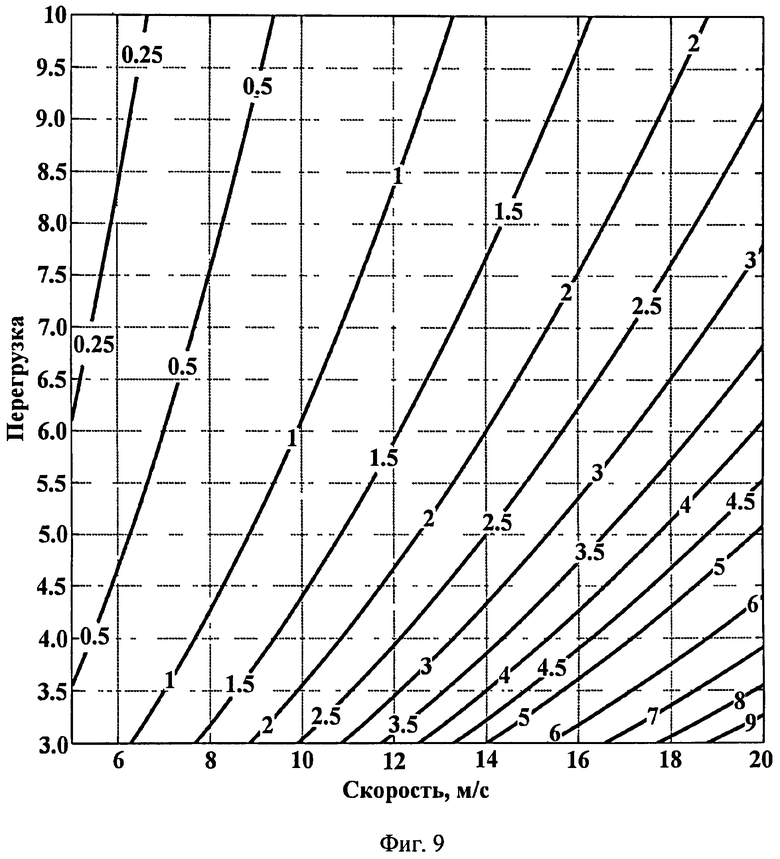
На фиг.9 для варианта вертикального входа БПЛА на второй каскад аэрофинишера приведены характерные зависимости между модулем входной скорости, перегрузкой при торможении и соответствующим перемещением беспилотника.
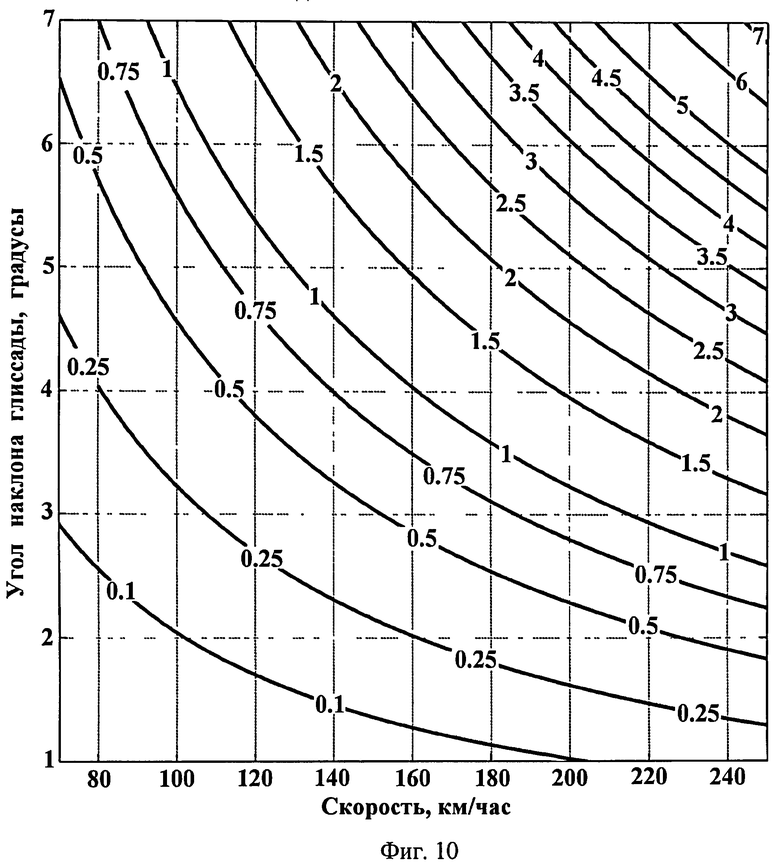
На фиг.10 показаны линии уровня функции вертикального смещения БПЛА от нижней точки переходного участка до точки выхода на восходящую глиссаду в зависимости от скорости захода на посадку и угла наклона глиссады при выполнении беспилотником маневра с нормальной перегрузкой nу=1,5 (маневр «взмывание»).
На этих чертежах использованы следующие обозначения:
В предложенном изобретении прообразом захватывающей системы (2, 3) на борту БПЛА можно считать выдвижной посадочный гак у палубных самолетов. В прототипе, как ранее уже отмечалось, для точного наведения участка приемного троса на короткий гак беспилотника используется манипулятор с возможностями управления не менее чем по двум независимым осям (степеням свободы). В сущности, предложенное в прототипе управление манипулятором является средством противодействия влиянию неконтролируемых атмосферных возмущений на траекторию движения БПЛА на посадочном режиме. В предложенном изобретении выбор достаточной протяженности по высоте выпущенной захватывающей системы (признак а), обеспечивающей попадание устройства зацепления на приемный трос, позволяет отказаться от применения манипулятора. Следовательно, по сравнению с прототипом обеспечивается возможность получить экономию, по крайней мере, по весу и энергопотреблению за счет исключения из конструкции аэрофинишера мощных приводов манипулятора.
Двумерная часть пространства, которая находится между траекторией движения нижней точки обводов самолета 1 и траекторией движения устройства зацепления 2, названа полосой захвата (см. позицию 14 на фиг.1). «Траление» зоны захвата 14 потенциально может быть реализовано с помощью длинного жесткого элемента типа профилированного стержня с устройством зацепления (гаком) на нижнем его конце. Но, учитывая требования по компактности системы в целом, минимизации ее аэродинамического сопротивления и веса, предпочтительно поводок 3 к устройству зацепления 2 сделать легко трансформируемым - гибким или раскладывающимся. На фиг.2 схематично изображен один из возможных вариантов компоновки механизма поводка в нижней части фюзеляжа БПЛА. До момента выпуска поводок 3 уложен на поворачивающейся защитной крышке 28 зигзагами в ячейки 19 (по типу укладки строп парашюта), причем фиксация 24 поводка автоматически снимается после поворота крышки 18 на угол больше заданного. Тогда под воздействием силы веса устройства зацепления 2 и сил давления на него от воздушного потока захватывающая система разворачивается во взведенное рабочее состояние (см. фиг.3).
Значимость отличительного признака - использования гибкого (или раскладывающегося) поводка 3 в системе захвата - определяется не только возможностью его компактного размещения в сравнительно коротком фюзеляже БПЛА, но также повышением надежности операции зацепления и рациональной схемой нагружения конструкции беспилотника. Наложение гибкого поводка 3 на приемный трос 7 аэрофинишера будет всегда происходить с захлестыванием, без упругого отскока, который возможен при определенных условиях в случае применения жесткого стержня в качестве поводка. Поскольку скольжение гибкого поводка вокруг охваченного участка приемного троса хотя и будет сравнительно кратковременным, но, тем не менее, такое растянутое по времени движение может быть сопряжено с меньшей нагрузкой на конструкцию БПЛА, чем в случае восприятия отдачи от удара по приемному тросу жестким стержнем.
Длину поводка 3 предлагается выбирать такой, чтобы с учетом его неизбежного отклонения от вертикали под воздействием воздушного потока, все-таки минимальная ширина заметаемой им полосы захвата 14 была сопоставима с величиной среднеквадратической точности выдерживания по высоте заданной траектории полета для конкретного типа БПЛА в ожидаемых условиях эксплуатации, то есть была бы равна или с заданным запасом была бы больше этой точности.
Точность выдерживания заданной траектории, как известно, зависит главным образом от точности измерений параметров движения объекта и эффективности его системы управления в противодействии внешним возмущениям. И если современные информационно-измерительные комплексы обеспечивают возможность определения координат БПЛА на посадочных режимах с погрешностями менее метра, то сильные атмосферные возмущения типа сдвига ветра при неблагоприятном сочетании условий могут вызвать неконтролируемую просадку или взмывание аппарата на заметно большую величину. Возможность увеличения длины поводка 3 до определенного предела пополняет арсенал располагаемых традиционных средств по обеспечению безопасной эксплуатации летательных аппаратов в сложных погодных условиях. Следует отметить, что предложенные в прототипе технические решения ориентированы на точность определения относительных координат кооперируемых объектов порядка нескольких миллиметров, а основным ресурсом для противодействия неконтролируемым отклонениям траектории полета БПЛА является эффективное управление перемещением U-образного насадка манипулятора.
Расположение в хвостовой части фюзеляжа позади центра тяжести БПЛА 15 зоны приложения момента сил от поводка, позволяющее не допустить на участке интенсивного торможения резкого изменения ориентации продольной оси беспилотника, предложено по аналогии с решениями, традиционными для палубных самолетов, выполняющих посадку с использованием тросового аэрофинишера. Необходимо указать, что именно через узлы сопряжения (18, 20, 21) поводка 3 с беспилотником на его конструкцию передается та огромная сила (примерно на порядок большая силы веса беспилотника), которая как раз и производит основную часть работы по уменьшению кинетической энергии. Как правило, в конструктивно-силовых схемах самолетов наиболее прочные несущие элементы конструкции располагаются вблизи центроплана. Поэтому подвод к этим несущим элементам конструкции главной нагружающей силы, причем работающей на растяжение, а не на сжатие, что характерно для схем обычных колесных шасси, создает благоприятные условия для формирования рациональных конструктивно-силовых схем катапультно-аэрофинишерных БПЛА, приспособленных к выполнению посадки предложенным способом.
Естественным в схеме сопряжения поводка с беспилотником является также вариант формирования команды (признак е) на отключение воздушного движителя (27, 28), инициируемой по превышению заданного тормозящего усилия после момента захвата устройством зацепления 2 приемного троса 7 (см. фиг.5). Под воздействием этого усилия крышка 18 сначала поступательно смещается относительно оси 21 в пределах паза 22, и после выхода за ограничитель 25 верхнего конца поворачивается, переключая формирователь 26.
Близким к прототипу является предложение натянуть приемный трос на определенной высоте (признак б) и осуществить торможение БПЛА без взаимодействия его с какой-либо опорной поверхностью (признак е). Основное отличие от прототипа по этому признаку е состоит в том, что положение мачт 4, между которыми натянут трос 7, в процессе захода беспилотника 1 на посадку остается стационарным относительно основания аэрофинишера. Хотя само основание может располагаться и на подвижном объекте, например, на морском судне. Такое решение потенциально позволяет применять мачты, выдерживающие большие нагрузки, и использовать предложенный способ для обеспечения посадки беспилотников различных классов, относящихся, в том числе, к классам среднему и тяжелому, в отличие от прототипа, технические решения которого ориентированы только на легкий класс БПЛА. В отличие от другого аналога (см. патент RU 2235045), согласно отличительным признакам которого для тяжелых и скоростных самолетов приходится выбирать достаточно высокие и прочные мачты, по предложенному изобретению минимально необходимая высота мачт может быть существенно (в разы) меньше. Этот эффект достигается не только за счет иной компоновки системы захвата (снизу БПЛА, а не сверху), но также за счет разделения аэрофинишера на каскады и использования иной схемы построения посадочной траектории (признаки г, д).
Для осуществления торможения БПЛА после его зацепления за приемный трос аэрофинишера может быть использована тросовая система торможения, функциональная схема конструкции которой аналогична тем, что используются на авианосцах при посадках палубных самолетов. На фиг.6 изображены характерные зависимости между параметрами движения БПЛА на первом каскаде аэрофинишера, отражающие, как две основные функции, возлагаемые обычно на шасси
- смягчение до приемлемого уровня посадочного удара,
- поглощение в процессе торможения кинетической энергии самолета,
осуществляются не на борту самолета. По первому и третьему графическим полям наглядно видно, что за счет рационального выбора угла наклона восходящей глиссады 13 конечное вертикальное смещение БПЛА к моменту завершения выпуска приемного троса 7 незначительно по сравнению с точкой входа. И если в момент зацепления преобладающей по модулю была продольная компонента вектора скорости (см. второе графическое поле на фиг.6), то в конце участка торможения преобладающей является направленная вниз вертикальная компонента вектора скорости, причем она по модулю существенно меньше (в несколько раз) скорости захода на посадку. Следует также отметить плавное нарастание (без рывка) скорости выпуска троса (см. четвертое графическое поле) и перегрузки торможения БПЛА при заданном ограничении по силе натяжения троса (показано на пятом графическом поле).
Заход на посадку против ветра является известным приемом понижения посадочной скорости и применяется в авиации (по мере имеющихся возможностей) со времен ее становления. Применительно к современному уровню развития техники предполагается, что аэрофинишер для БПЛА является мобильной системой, т.е. либо он размещен на подвижном основании (например, на буксируемой платформе или на корабле), либо аэрофинишер может быть оперативно развернут в рабочее состояние в выбранном месте за ограниченное время (условно - не более часа). Поэтому перед выполнением посадки БПЛА на аэрофинишер предлагается его соответствующим образом сориентировать (признак в). Воздействие бокового ветра на БПЛА, совершающего посадку по предложенному способу, нежелательно из-за отсутствия эффективных средств контроля бокового движения аппарата на первом участке торможения, на котором обычные аэродинамические органы управления быстро становятся малоэффективными. При сильном боковом ветре это может ухудшить начальные условия для функционирования второго каскада аэрофинишера (10, или 29, 30, 31) и привести, например, либо к необходимости увеличения плановых размеров этой системы, или к корректирующему смещению ее от плоскости симметрии. Для прототипа отмеченные особенности не являются значимыми благодаря возможностям ориентации манипулятора по любому направлению и коротким посадочным дистанциям. Но для обеспечения посадки высокоскоростных и тяжелых БПЛА, у которых посадочная дистанция составляет десятки метров, и при вынужденном развертывании аэрофинишера на площадке с уклоном, когда не получается сориентировать аэрофинишер вдоль направления ветра, отмеченные особенности необходимо учитывать. Этими обстоятельствами как раз и определяется значимость отличительного признака предложенного изобретения.
Признак наличия второй тормозной системы практически всегда имеется у взлетно-посадочных комплексов современных авианосцев. Но на них эта система используется как аварийное средство в особых ситуациях и обычно представляет собой автоматически поднимаемую в вертикальное положение у конца палубы улавливающую ленточную сеть (аварийный барьер типа «баррикада»). Поскольку при использовании этого аварийного средства приоритетной задачей является спасение пилота, то допускается возможность повреждения некоторых элементов конструкции самолета Следует отметить, что на ряде сухопутных аэродромов также вблизи концов ВПП установлены стационарно аварийные барьеры аналогичной конструкции. В отличие от варианта применения в эксплуатируемых посадочных комплексах второй тормозной системы в аварийных ситуациях, в предложенном изобретении второй каскад аэрофинишера (признак г) используется в каждой штатной ситуации и функционально дополняет первый каскад. Элементы конструкции аэрофинишера предлагается расположить так, чтобы область работоспособности второго каскада полностью покрывала область допустимых конечных состояний БПЛА, получающихся в результате его торможения на первом каскаде.
В отличие от повсеместно используемых схем построения посадочных траекторий самолетов, в которых вектор скорости летательного аппарата на заключительном участке полета направлен на уменьшение высоты и на сближение с посадочной площадкой, в предложенном изобретении вектор скорости непосредственно перед контактом с аэрофинишером ориентирован на набор высоты и на пролет над посадочной площадкой. Техническое решение по такому изменению схемы захода (признак д) является ключевым для обеспечения благоприятных начальных условий попадания БПЛА на второй каскад аэрофинишера. Позитивный эффект получается за счет рационального задания угла наклона траектории для режима набора высоты в зависимости от посадочной скорости, допустимой перегрузки торможения беспилотника и допустимого диапазона рассогласования его координат в момент зацепления за приемный трос. Номинально этот угол подбирается так, чтобы результирующее вертикальное смещение БПЛА, суммирующее за время торможения тросом разнонаправленные тенденции (подъем вверх по инерции и движение вниз под воздействием сил веса и натяжения троса), оказалось бы на приемлемом уровне. При этом скорость движения беспилотника снижается до безопасно поглощаемой демпферами второго каскада величины. Для наиболее распространенных сочетаний летно-технических характеристик беспилотников приемлемый диапазон углов наклона восходящей глиссады 13 может находиться в диапазоне 0°÷15°, а для большинства типов БПЛА рациональная величина этого угла равна 4°÷5°.
Если аэрофинишер расположен не на вершине холма, то типовое построение траектории захода на посадку с выходом на указанные параметры заключительного участка набора высоты должно включать кроме него самого еще участок снижения 11 и переходный участок между ними 12 с выходом на пологое кабрирование. В схеме построения посадочной траектории по предложенному способу при сопоставлении ее со стандартной схемой нетрудно заметить аналогию в разделении на участки: переходному участку соответствует участок «выравнивание», участку восходящей глиссады соответствует «выдерживание».
В результате контакта устройства зацепления 2 с тросом 7 должна образоваться механическая связь между БПЛА и аэрофинишером. Если по каким-либо причинам зацепление не произойдет, то беспилотник продолжит движение с набором высоты, обеспечивая возможность повторного вывода на исходную высоту и осуществления повторного захода на посадку. С позиций обеспечения безопасности полета, предложенный в изобретении вариант операции захвата предпочтительнее по сравнению с применяемыми в настоящее время на практике аналогичными скоротечными посадочными операциями. В эксплуатирующихся посадочных комплексах противоаварийное управление включается, как правило, после того, как произошло опасное событие, например не состоялось штатное зацепление приемного троса гаком палубного самолета на авианосце. В предложенном изобретении БПЛА выводится на траекторию, проходящую мимо посадочного комплекса, до того, как произойдет определяющее событие - механический контакт с приемным тросом. В прототипе не указаны какие-либо признаки, регламентирующие формирование траектории захода на посадку - по-видимому, полагается, что за счет ловкости U-образного захвата манипулятора обеспечиваются приемлемые решения при возникновении вышерассмотренных особенностей.
При стационарном положении аэрофинишера в процессе захода на посадку опорная траектория 11 (глиссада) снижения БПЛА может быть сформирована с использованием обычных бортовых или наземных радиотехнических и/или оптических средств подобно тому, как это делается в существующих посадочных комплексах. Сигнал на переход с участка снижения на переходный участок 12 может быть сформирован, например, на основе измерений геометрической высоты с помощью радио- или ультразвукового высотомера, или измерений дальности. Для аэрофинишера, установленного на подвижном основании, находящемся в нестационарных условиях, например на плывущем в неспокойном море корабле, определение в информационном пространстве опорной траектории предпочтительнее производить относительно прогнозируемой точки зацепления 6. Ее координаты можно вычислить на основе экстраполяции движения основания на выбранном интервале времени. Возможности современных бортовых информационных комплексов позволяют решать такого класса вычислительные задачи с приемлемой точностью в реальном масштабе времени.
По сигналу зацепления могут быть произведены и другие операции, например, открыты замки и освобождены для свободного поворота относительно наклонных осей крылья 32 (признак ж), которые в такой ситуации сориентируются вдоль направления действия инерционных сил. Предложенная операция потенциально позволяет улучшить условия нагружения крыльев за счет изменения направления действия на них доминирующих сил - ближе к направлениям образующих. Кроме изменения схемы нагружения, предложенный поворот позволяет также уменьшить размах крыла, а следовательно, можно уменьшить размеры второго каскада аэрофинишера. Таким образом, на первом каскаде решается задача поглощения большей части кинетической энергии беспилотника с обеспечением рациональной схемы силового нагружения конструкции, а также подготавливается его конфигурация к взаимодействию со вторым каскадом аэрофинишера.
Потенциально задача «мягкой» остановки БПЛА на втором каскаде (признак з) может быть решена с помощью нескольких типов отличающихся по конструкции устройств, например, воздушной подушки 10 или сети 31. Если, как показано на фиг.8, сложены крылья 32 и обеспечена за счет флюгерных свойств заданная ориентация новой конфигурации в конце первого участка торможения, то возможно применение в качестве демпфирующей и останавливающей среды легкой жидкости, например воды.
На фиг.9 показаны характерные зависимости для процесса торможения при рабочем ходе по вертикали, например, когда беспилотник падает сверху на надутую воздухом подушку 10. Рабочий ход торможения может быть задан не только по вертикали, но и по другому направлению. Для этого можно между первым и вторым каскадами поместить подходящий упор 30, на который после завершения первого этапа торможения опустится натянутый поводок 3 или выпущенный приемный трос 7. Тогда точка на поверхности этого упора станет центром вращения образовавшегося физического маятника, и это вращение создаст широкие возможности для расположения в наиболее подходящей конфигурации (по наиболее выгодному направлению) средств демпфирования колебаний.
Следует отметить, что определяемый характеристиками второго каскада отличительный признак предложенного изобретения по основной функции - торможению до полной остановки - сходен с соответствующим признаком для существующих аэрофинишерных систем в виде вертикально натянутой улавливающей сети. Но в нашем варианте пониженная скорость входа на второй каскад позволяет, во-первых, не производить каких-либо дополнительных усилений конструкции БПЛА специально для исключения ее повреждений на заключительном этапе торможения и, во-вторых, использовать больший арсенал средств торможения, а не только улавливающую сеть.
Дополнительно к основному техническому результату изобретения (в части обеспечения условий повышения эффективности конструкции БПЛА) предложенные решения создают предпосылки для формирования компактной конструкции аэрофинишера по вертикальному размеру. В предложенном способе на определение минимально допустимой высоты конструкции аэрофинишера влияют два фактора: это разность высот между уровнем приемного участка троса и нижней допустимой точкой траектории устройства зацепления на переходном участке 12, а также потребный размер по высоте второго каскада аэрофинишера. На фиг.10 представлены зависимости между характерными значениями скорости захода на посадку, углом наклона восходящей глиссады 13 и вертикальным смещением беспилотника при маневре с перегрузкой nу=1.5 от нижней точки траектории до точки выхода на эту глиссаду. С добавлением запаса на ширину заметаемой зоны поводком захватывающей системы, приведенные на фиг.10 зависимости позволяют оценить потребную высоту аэрофинишера, определяемую первым из вышеперечисленных факторов. Влияние второго фактора можно оценить по зависимостям на фиг.9. При штатно выполненном торможении на первом каскаде аэрофинишера, скорость БПЛА на входе во второй каскад не должна превышать 10÷15 м/с. На основании приведенных данных минимальная высота аэрофинишера оценивается от нескольких метров (при скорости захода 25÷30 м/с), до порядка 7÷10 метров (для скоростей захода 60÷70 м/с). То есть вертикальный размер аэрофинишера по предложенному способу в разы меньше, чем у его аналога в патенте RU 2235045.
Осуществление изобретения
В предыдущих разделах при раскрытии отличительных признаков предложенного изобретения рассматривались особенности осуществления нового способа в сопоставлении не только с прототипом, но и определялось сходство с функционированием уже существующих посадочных комплексов. Для придания требуемых функциональных свойств БПЛА и аэрофинишеру были предложены варианты возможных конструкторских решений. По отношению к этим новшествам правомерен вопрос, достижимы ли требуемые от них характеристики на существующем технологическом уровне? Перечень основных компонентов, требуемых для реализации предложенного способа посадки, составляет следующие объекты:
- бортовой информационно-управляющий комплекс,
- наземный информационно-управляющий комплекс,
- захватывающая система,
- конструкция первого каскада аэрофинишера,
- конструкция второго каскада аэрофинишера.
Бортовой и наземный информационно-измерительные комплексы используются в предложенном способе для того, чтобы подвести БПЛА с требуемыми значениями параметров движения к приемному тросу. В сущности, это типичная задача построения траектории захода на посадку, отличающаяся только в деталях на завершающем участке полета: точка начала переходного маневра располагается выше, чем точка начала обычного выравнивания и траектория выводится не на плавное сближение с ВПП, а на набор высоты. Очевидно, что эти отличия в управлении каких-либо дополнительных требований к функциям и характеристикам существующих инструментальных средств не определяют - нужна лишь незначительная корректировка настроек алгоритмов управления.
В качестве устройства зацепления в захватывающей системе может быть использовано известное устройство захвата типа «кошка» с независимыми спусковыми механизмами 17 и защелками 16 на каждой из трех лап (для исключения непреднамеренного отсоединения зацепленного троса). Наиболее простой конструкцией поводка, по-видимому, является отрезок каната требуемой длины, сплетенный из современных сверхпрочных нитей, например, типа Русар® (www.aramid. ru).
Конструкцию первого каскада аэрофинишера образуют следующие основные компоненты: пара силовых мачт 4 с системой направляющих блоков 5, 8 для троса, синтетический трос 7 и накопитель 9 с системой торможения этого троса. Среди перечисленных компонент наибольший уровень технологической сложности имеет система торможения. В качестве базовой конструкции для этой системы можно использовать механически соединенные с тросонесущим барабаном дисковые или колодочные тормоза колес транспортных средств. Имеется обширный набор отработанных конструкций этих тормозов, применяемых от велосипедов и микроавтомобилей до тяжелых транспортных самолетов типа Ил-76 или Ан-124. Это позволяет подобрать для конкретных типов беспилотников тормоза с наиболее подходящими для них характеристиками.
Одной из наиболее простых и компактных по высоте конструкций второго каскада аэрофинишера является воздушная подушка - оболочка из легкой водонепроницаемой ткани наполненная воздухом низкого давления. Например, серийно выпускаемые в России фирмой «МКСистемы» (www. mks112. ru) двухсекционные воздушные подушки для спасательных работ (эвакуации) при пожарах имеют следующие характеристики:
Нетрудно оценить, что самая младшая модель IC50, номинально рассчитанная на падение на нее тела весом порядка 80 кг со скоростью до 15 м/с, по своим демпфирующим свойствам вполне удовлетворяет требованиям к входным характеристикам второго каскада аэрофинишера применительно к классу легких БПЛА. Старшие модели подушек этой фирмы могут быть приспособлены к приземлению более тяжелых беспилотников. А для улавливания беспилотников тяжелого класса, например, по схеме фиг.8, в качестве прототипа конструкции штатной улавливающей сети второго каскада может быть взята сеть из систем предотвращения аварийного выкатывания самолетов с ВПП (с соответствующими коррекциями на вес принимаемого объекта).
Таким образом, проведенный анализ показал возможность технической реализуемости предложенного изобретения на существующем технологическом уровне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система посадки беспилотных летательных аппаратов | 2024 |
|
RU2834064C1 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678408C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2003 |
|
RU2235045C1 |
| Наземное подвижное средство посадки (НПСП) беспилотного летательного аппарата (БЛА) и способ посадки БЛА на НПСП | 2016 |
|
RU2624522C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2067951C1 |
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |
Изобретение относится к области авиации, более конкретно к способу посадки беспилотного самолета на аэрофинишер. Способ заключается в том, что на посадочном режиме траекторию полета самолета формируют так, чтобы зацепление за приемный участок троса происходило при пролете или после пролета над этим участком, после чего выключают воздушный движитель и как можно интенсивнее тормозят самолет до заданной скорости, при этом регулируя выпуск приемного троса. При этом для заданного диапазона скоростей захода на посадку в допустимых условиях эксплуатации конкретного типа самолета характеристики системы, захватывающей трос, определены так, чтобы ширина заметаемой гибким поводком полосы захвата была не меньше точности управления по высоте траекторией полета этого типа самолета. После зацепления за приемный трос первого каскада аэрофинишера производится интенсивное поглощение кинетической энергии самолета посредством воздействия сосредоточенной силы на основной несущий элемент его конструктивно-силовой схемы. Далее на втором каскаде аэрофинишера, сопряженном с первым, торможение беспилотника до полной остановки осуществляется за счет распределенного силового воздействия на его поверхность демпфирующих элементов этого каскада. Технический результат направлен на повышение эффективности эксплуатационных свойств беспилотного летательного аппарата. 2 з.п. ф-лы, 11 ил., 1 табл.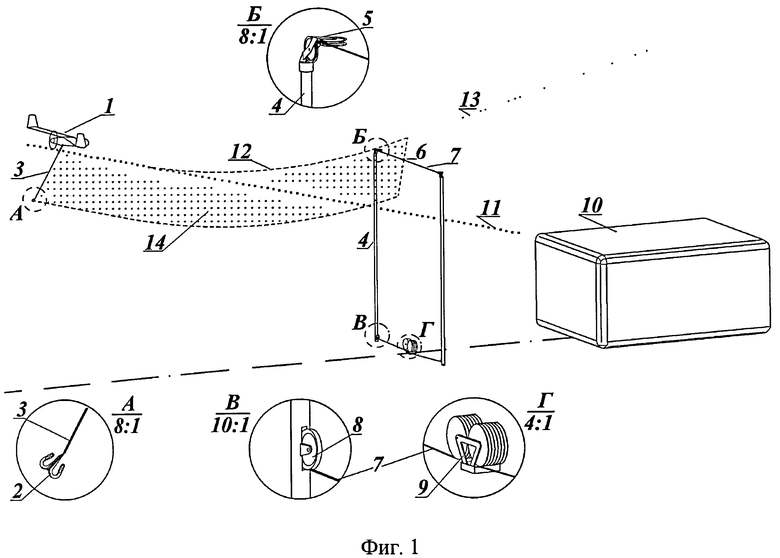
1. Способ посадки беспилотного самолета на аэрофинишер, в котором используют приемный участок подвижного троса, натянутый через направляющие ролики горизонтально посредине между верхними концами двух балок, имеющих механическую связь нижними концами с основанием, а на принимаемом самолете захватывающая трос система расположена позади его центра тяжести, при этом на посадочном режиме траекторию полета самолета формируют так, чтобы зацепление за приемный участок троса происходило при пролете или после пролета над этим участком, после чего выключают воздушный движитель и как можно интенсивнее тормозят самолет до заданной скорости, соблюдая при этом принятые для него ограничения по перегрузке и регулируя выпуск приемного троса, отличающийся тем, что для заданного диапазона скоростей захода на посадку в допустимых условиях эксплуатации конкретного типа самолета характеристики захватывающей трос системы длина, вес, несущие свойства и аэродинамическое сопротивление определены так, чтобы ширина заметаемой гибким поводком полосы захвата была не меньше точности управления по высоте траекторией полета этого типа самолета, у первого каскада аэрофинишера поддерживающие приемный участок троса балки (мачты) неподвижны относительно основания в процессе захода на посадку, а высота расположения приемного участка троса над прилегающей к аэрофинишеру поверхностью больше суммы номинального приращения высоты на заданном маневре перехода на пологое кабрирование и точности управления самолетом по высоте, причем второй каскад аэрофинишера размещают относительно первого каскада так, чтобы область допустимых начальных условий второго каскада аэрофинишера полностью покрывала область конечных состояний самолета после торможения его на первом каскаде, на режиме захода на посадку наведение траектории полета производят в расположенную на осевой вертикальной плоскости аэрофинишера номинальную точку начала выполнения маневра пологого подъема, затем осуществляют этот маневр вдоль осевой плоскости аэрофинишера до момента наложения захватывающей системы на приемный участок троса, соединяют устройство зацепления с приемным тросом, после чего подавляющую часть кинетической энергии самолета поглощают на первом каскаде аэрофинишера за счет работы, совершаемой сосредоточенной силой подводимой через поводок к основному несущему элементу (основным несущим элементам) конструктивно-силовой схемы самолета, а оставшуюся часть кинетической энергии поглощают на втором каскаде аэрофинишера преимущественно за счет работы распределенных сил, воздействующих на внешнюю поверхность самолета со стороны демпфирующих элементов этого каскада.
2. Способ посадки беспилотного самолета на аэрофинишер по п.1, отличающийся тем, что положение второго каскада аэрофинишера относительно первого каскада корректируют перед посадкой в зависимости от силы и направления ветра.
3. Способ посадки беспилотного самолета на аэрофинишер по пп.1 и 2, отличающийся тем, что после момента зацепления за приемный трос аэрофинишера производят поворот крыльев в положение с меньшим уровнем нормальных нагрузок к их поверхности.
| Способ посадки пилотируемого летательного аппарата на авианесущий корабль и система для ее осуществления | 1990 |
|
SU1837038A1 |
| US 7410125 B2, 12.08.2008 | |||
| RU 99100479 A, 10.10.2000 | |||
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СПОСОБ ПОСАДКИ САМОЛЕТА НА ПАЛУБУ АВИАНЕСУЩЕГО КОРАБЛЯ | 2003 |
|
RU2251515C1 |
| DE 10041492 A1, 21.02.2002. | |||

