Изобретение относится к строительной технике и может быть использовано при извлечении из грунта различных длинномерных стержневых элементов: труб, швеллеров, шпунта, двутавров и т.д.
Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения одинаковой величины выдергивающих усилий в начале прямого и обратного хода гидроцилиндров.
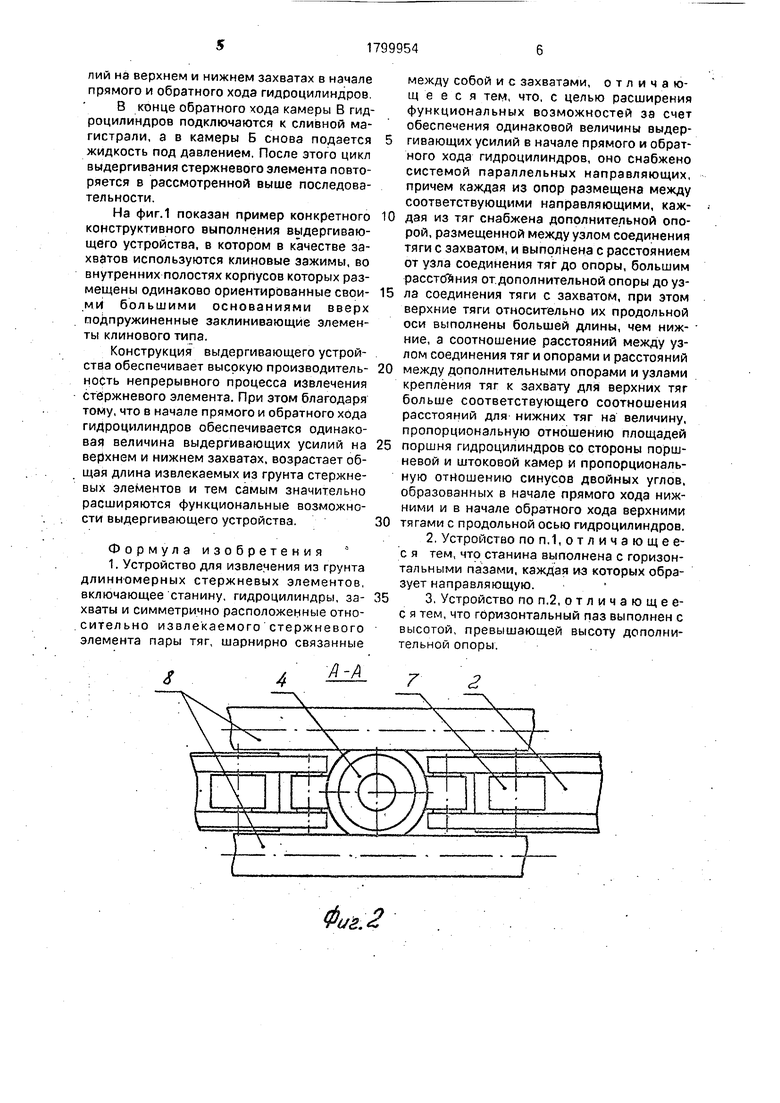
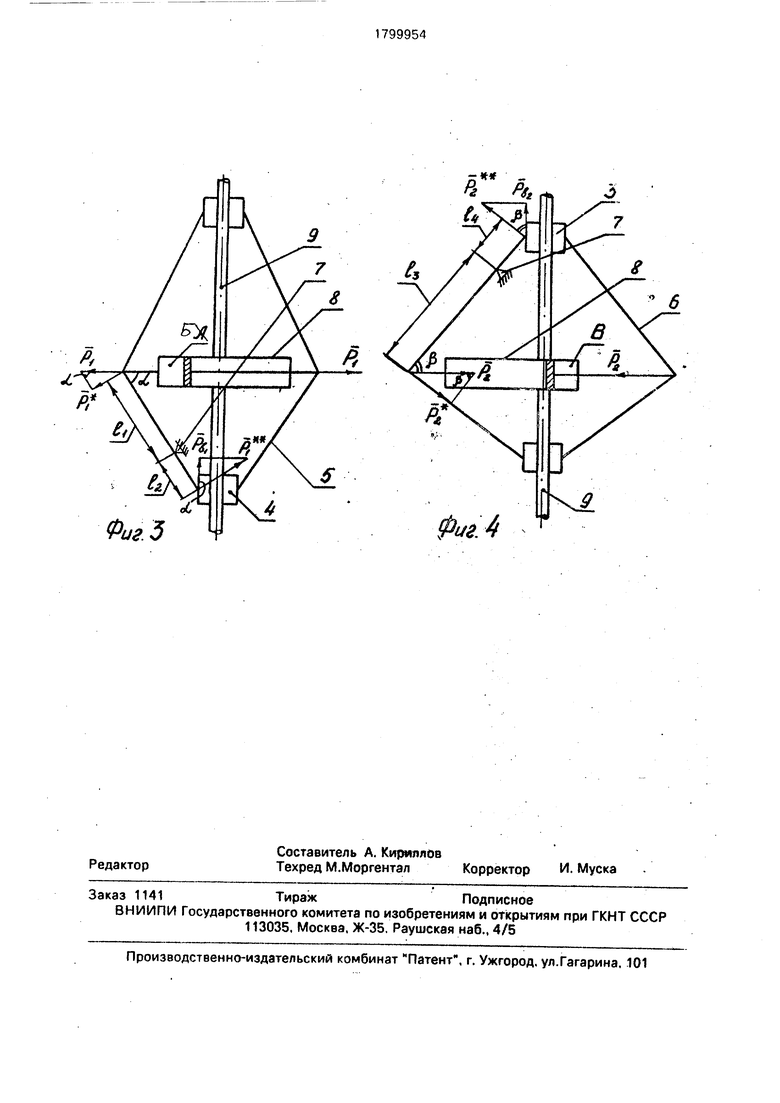
На фиг.1 показана конструкция выдергивающего устройства; на фиг.2 - сечение -А на фиг. 1; на фиг. 3 и 4 - схема действия : сил в начале прямого (фиг.З) и обратного фиг.4) хода гидроцилиндров.
Устройство (фиг,1) состоит из размещенных на его станине 1 опорных площадок 2, верхнего 3 и нижнего 4 захватов, шарнир- но соединенных с их корпусами и между собой тяг 5 и 6, катков 7 и гидроцилиндров 8. Выполняющие функцию дополнительных опор катки 7 размещены в верхней и нижней .системах параллельных направляющих опорных площадок 2 станины 1. В конструкции выдергивающего устройства на фиг.1 каждая из систем направляющих выполнена в виде горизонтальных пазов.
Перед извлечением стержневого элемента 9 выдергивающее устройство устанавливается на него, опираясь станиной 1 на поверхность грунта, При подаче жидкости в полость Б гидроцилиндров развиваемые ими усилия увеличиваются при помощи образованной тягами 5, катками 7 и горизонтальными пазами опорной площадки 2 нижней рычажной системы и передаются на захват 4, который вместе с извлекаемым стержневым элементом 9 начинает перемещаться вверх. Одновременно с этим при помощи тяг 6 усилия гидроцилиндров передаются на верхний захват 3, который перемещается вниз по стержню на новый уровень.
В конце прямого хода жидкость подается в камеры В гидроцилиндров, а камера Б подключаются к сливной магистрали. Развиваемые гидроцилиндрами усилия через тяги 5 и 6 начинают передаваться на верхний и нижний захваты. При этом нижний захват 4 начинает перемещаться вниз по стержню, а верхний захват 3 жестко фиксирует стержневой элемент 9 и под действиями усилий, увеличенных образованной тягами 6, катками 7 и горизонтальными пазами опорной площадки 2 верхней рычажной системой, начинает извлекать его из грунта.
Входящие в состав верхней рычажной системы верхние тяги б имеют большую длину, чем нижние тяги 5 и выполнены так,
что соотношение расстояний между узлом соединения тяг и катками 7 и расстояний между катками 7 и узлами крепления тяг к захвату больше соответствующего соотношения расстояний для нижних тяг на величину, пропорциональную отношению площадей поршня гидроцилиндров со стороны поршневой и штоковой камер и пропорциональную отношению синусов
двойных углов, образованных в начале прямого хода нижними и в начале обратного хода верхними тягами с продольной осью гидроцилиндров.
Такое конструктивное исполнение верхней рычажной системы позволяет обеспечить одинаковую величину выдергивающих усилий на верхнем и нижнем захватах устройства в начале прямого и обратного хода гидроцилиндров, несмотря на различную
величину развиваемых ими усилий за счет разности площадей поршня со стороны поршневой и штоковой камер.
Согласно принятой на фиг.З и 4 системе „Обозначений, выдергивающие, усилия на
нижнем и верхнем захватах определяются формулами
РЫ 2 Pi sin2«;
;Ј-sln2/S.
где РЫ и Рьа - выдергивающие усилия на нижнем и верхнем захватах;
Pi Sn p и PZ 5Ш Р - величина усилий
на нижнем и верхнем захватах;
Р - рабочее давление жидкости в начале прямого и обратного хода;
Sn и 5Ш - площади поршня гидроцилиндров со стороны поршневой и штоковой камер;
а - угол между нижней относительно продольной оси гидроцилиндра тягой и его продольной осью;
/3 - угол между верхней относительно продольной оси гидроцилиндра тягой и его продольной осью.
Из этих формул следует, что равенство выдергивающих усилий в начале прямого и обратного хода гидроцилиндров обеспечи
вается при выполнении условия i . sn sln.2« Ц la Sui sin2/
где h.te.b и 14 - соотношение соответствующих расстояний для нижней и верхних тяг согласно фиг.З и 4.
Уравнение (1) является математическим эквивалентом формулы изобретения и позволяет производить выбор геометрических параметров устройства, обеспечивающих одинаковую величину выдергивающих усилий на верхнем и нижнем захватах в начале прямого и обратного хода гидроцилиндров.
В конце обратного хода камеры В гидроцилиндров подключаются к сливной магистрали, а в камеры Б снова подается жидкость под давлением. После этого цикл выдергивания стержневого элемента повторяется в рассмотренной выше последовательности.
На фиг.1 показан пример конкретного конструктивного выполнения выдергивающего устройства, в котором в качестве захватов используются клиновые зажимы, во внутренних полостях корпусов которых размещены одинаково ориентированные своими большими основаниями вверх подпружиненные заклинивающие элементы клинового типа.
Конструкция выдергивающего устройства обеспечивает высокую производительность непрерывного процесса извлечения стержневого элемента. При этом благодаря тому, что в начале прямого и обратного хода гидроцилиндров обеспечивается одинаковая величина выдергивающих усилий на верхнем и нижнем захватах, возрастает общая длина извлекаемых из грунта стержневых элементов и тем самым значительно расширяются функциональные возможности выдергивающего устройства.
Формула изобретения ° 1. Устройство для извлечения из грунта длинномерных стержневых элементов, включающее станину, гидроцилиндры, захваты и симметрично расположенные отно- сительно извлекаемого стержневого элемента пары тяг, шарнирно связанные
между собой и с захватами, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения одинаковой величины выдергивающих усилий в начале прямого и обратного хода гидроцилиндров, оно снабжено системой параллельных направляющих, причем каждая из опор размещена между соответствующими направляющими, каж0 дая из тяг снабжена дополнительной опорой, размещенной между узлом соединения тяги с захватом, и выполнена с расстоянием от узла соединения тяг до опоры, большим расстояния от.дополнительной опоры до уз5 ла соединения тяги с захватом, при этом верхние тяги относительно их продольной оси выполнены большей длины, чем нижние, а соотношение расстояний между узлом соединения тяг и опорами и расстояний
0 между дополнительными опорами и узлами крепления тяг к захвату для верхних тяг больше соответствующего соотношения расстояний для нижних тяг на величину, пропорциональную отношению площадей
5 поршня гидроцилиндров со стороны поршневой и штоковой камер и пропорциональную отношению синусов двойных углов, образованных в начале прямого хода нижними и в начале обратного хода верхними
0 тягами с продольной осью гидроцилиндров. 2. Устройство поп.1,отличающее- с я тем, что станина выполнена с горизонтальными пазами, каждая из которых образует направляющую.
5 3. Устройство по п.2, отличающее- с я тем, что горизонтальный паз выполнен с высотой, превышающей высоту дополнительной опоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для извлечения из грунта длинномерных стержневых элементов | 1990 |
|
SU1719537A2 |
| Устройство для извлечения из грунта длинномерных стержневых элементов | 1989 |
|
SU1645373A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА СТЕРЖНЕВЫХ КОНИЧЕСКИХ ЭЛЕМЕНТОВ | 1997 |
|
RU2139389C1 |
| Устройство для извлечения конусных элементов из грунта | 1981 |
|
SU968180A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИЗ ОСНОВАНИЯ ЖЕЛЕЗОБЕТОННЫХ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2000 |
|
RU2177525C2 |
| ИЗВЛЕКАТЕЛЬ ФУНДАМЕНТОВ ИЗ ГРУНТА | 1999 |
|
RU2170302C2 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| АГРЕГАТ ДЛЯ УДАЛЕНИЯ ИЗ ГРУНТА АНКЕРОВ И ФУНДАМЕНТОВ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2280734C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| Устройство для извлечения из грунта строительных элементов,преимущественно обсадных труб | 1977 |
|
SU742533A1 |
Использование: в строительной технике. Сущность изобретения: выдергивающее устройство состоит из размещенных на его станине 1 опорных площадок 2, верхнего 3 и нижнего 4 захватов, шарнирно соединенных с их корпусами и между собой тяг 5 и 6, катков 7 и гидроцилиндров 8. При последовательной подаче жидкости в полости Б и В гидроцилиндров 8 развиваемые ими усилия при помощи верхней рычажной системы, образованной тягами 6, катками 7 и горизонтальными пазами опорной площадки 2, и нижней рычажной системы, образованной тягами 5, катками 7 и горизонтальными пазами опорной площадки 2, передаются на работающие в противофазе захвата 3 и 4. При этом в тот момент/когда один из захватов жестко фиксирует стержневой элемент 9 и извлекает его из грунта, другой захват переустанавливается на новый уровень. В| результате этого реализуется непрерывный лроцесс извлечения стержневого элемента как в режиме рабочего, так и в режиме холостого хода гидроцилиндров. 2 з.п.ф-лы, 4 ил.
Фиг.2
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для извлечения из грунта длинномерных стержневых элементов | 1989 |
|
SU1645373A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
