Изобретение относится к медицинской технике.
Известен многофункциональный активный протез руки, в котором для ротации кисти, соединенной вращательной парой с предплечьем, используется электропровод.
Целью изобретения является приближение движения кисти к естественному.
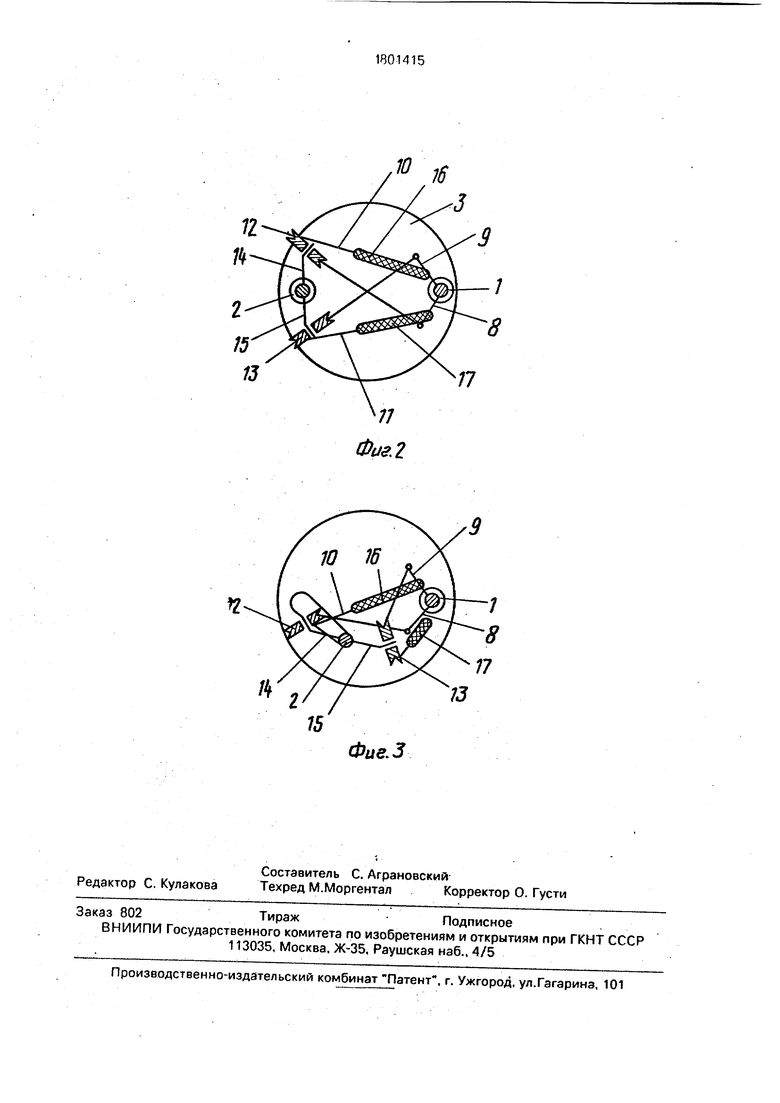
На фиг.1 показан один из возможных вариантов механизма ротации кисти; на фиг.2 - сечение А-А на фиг.1, в нейтральном положении кисти; на фиг.З - то же, при повороте кисти по часовой стрелке.
Механизм образован стержнями 2 и 1. Основание стержня 1 жестко закреплено на внешней стороне культеприемника 3, верхняя часть через втулку 4 жестко соединена с внешним кольцом подшипника 5.
Основание стержня 2 установлено на внешней стороне культеприемника 3 с возможностью карательного движения при помощи сферического подшипника 6. Верхняя часть стержня 2 входит в прорезь со скругленными краями, выполненную во втулке 7, жестко соединенной с внутренним кольцом подшипника 5. Протез кисти 18 жестко крепится к втулке 7. Стержень 1 снабжен выступами 8 и 9, к которым жестко прикреплены нити 10 и 11, проходящие через блоки 12 и 13, установленные с возможностью поворота на выступах 14 и 15 стержня 2. Натяжение нитей 10 и 11 осуществляется при помощи технических мышц 16 и 17, противоположные концы которых закреплены на внешней стороне культеприемника 3. Для того, чтобы ротация кисти 18 не влияла на положение ее пальцев, нити 19, через которые произво00
о
ел
дится управление пальцами, выведены внутрь втулки 7. Для большей косметично- сти стержням 1 и 2 может быть придана форма лучевых костей.
Движение происходит следующем образом. Для поворота кисти против часовой стрелки напряжение подается на мышцу 16, которая сокращаясь, натягивает нить 10,, приближает блок 12 к выступу 8, вызывая перекос стержня 2 по отношению к стержню 1. Стержень 1, перекашиваясь, поворачивает втулку 7 вместе с кистью 18 против часовой стрелки относительно предплечья. Для поворота по часовой стрелке напряжение подается на мышцу 17.
Данная конструкция механизма ротации кисти позволяет приблизить конструкцию протеза руки к естественному аналогу, сделать протез более косметичным.
Формула изобретения Механизм ротации кисти, содержащий гильзу, предплечья и размещенный в ней привод в виде технических мышц, кинематически связанных трособлочной передачей с искусственной кистью, шарнирно установленной в гильзе предплечья, отличающийся тем, что, с целью приближения движений кисти к естественным, в него введены неподвижный и подвижный стержни, первый из которых закреплен на гильзе предплечья, а второй шарнирно установлен в ней с возможностью перекоса относительно неподвижного стержня и кинематически связан с искусственной кистью, при этом блоки трособлочной передачи размещены на подвижном стержне.
Фие.З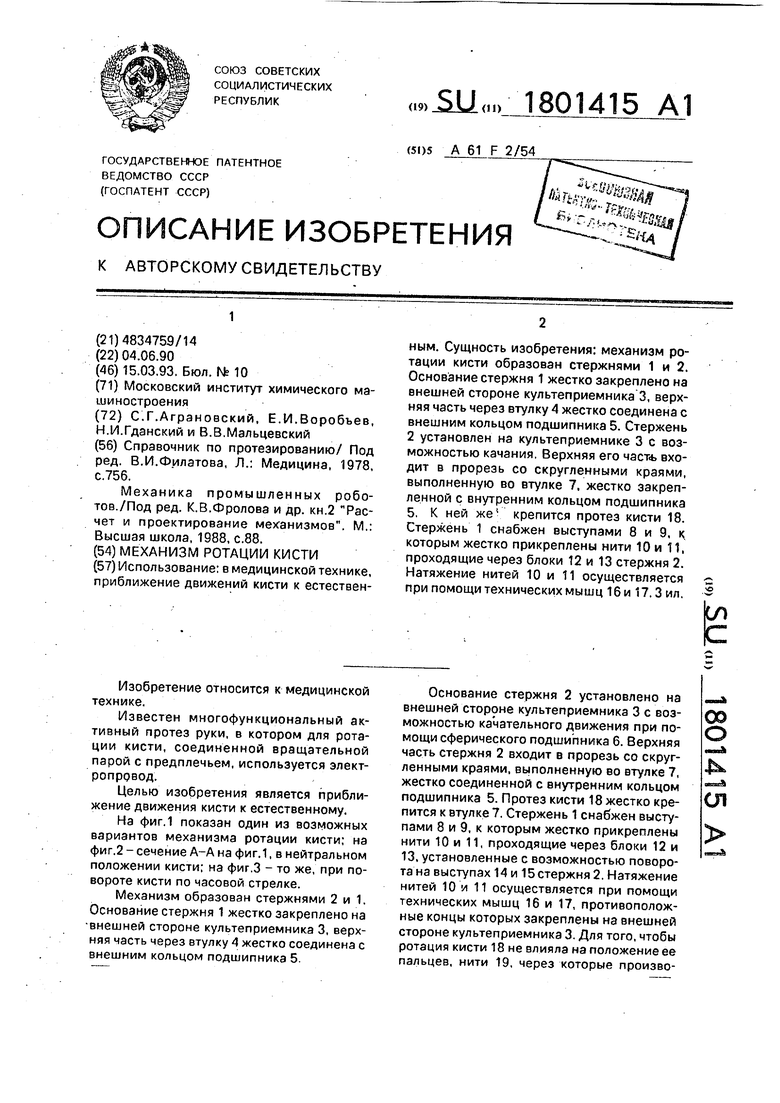

| название | год | авторы | номер документа |
|---|---|---|---|
| Протез предплечья | 1987 |
|
SU1416120A1 |
| Протез предплечья | 1989 |
|
SU1732969A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| Электромеханическая кисть | 2017 |
|
RU2663941C1 |
| ПРОТЕЗ РУКИ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 1973 |
|
SU377158A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
Использование: в медицинской технике, приближение движений кисти к естественным. Сущность изобретения: механизм ротации кисти образован стержнями 1 и 2. Основание стержня 1 жестко закреплено на внешней стороне культеприемника 3, верхняя часть через втулку 4 жестко соединена с внешним кольцом подшипника 5. Стержень 2 установлен на культеприемнике 3 с возможностью качания. Верхняя его часть входит в прорезь со скругленными краями, выполненную во втулке 7. жестко закрепленной с внутренним кольцом подшипника 5, К ней же1 крепится протез кисти 18. Стержень 1 снабжен выступами 8 и 9, к. которым жестко прикреплены нити 10 и 11, проходящие через блоки 12 и 13 стержня 2. Натяжение нитей 10 и 11 осуществляется при помощи технических мышц 16и 17.3 ил.
| Справочник по протезированию/ Под ред | |||
| В.И.Филатова, Л.: Медицина, 1978, с.756 | |||
| Механика промышленных роботов./Под ред | |||
| К.В.Фролова и др | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Высшая школа, 1988, с.88 | |||
