Изобретение относится к авиационному двигателестроению и может быть использовано в системах автоматического управления (САУ) газотурбинными двигателями (ГТД).
Целью изобретения является повышение качества управления двигателем и надежности его работы путем уменьшения ошибки регулирования в контуре частоты вращения ротора ГТД.
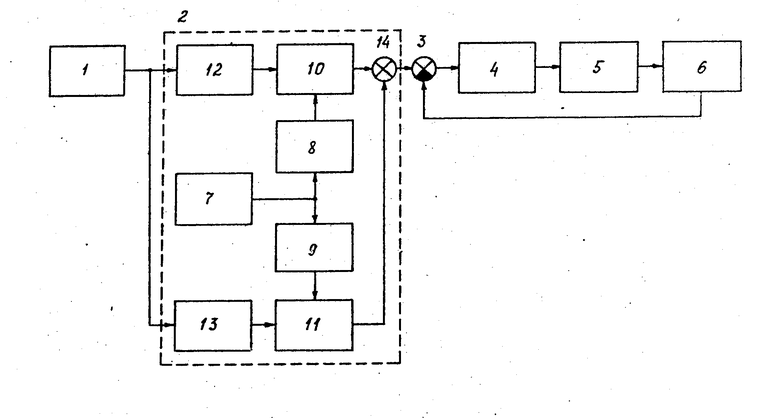
Сущность изобретения поясняется чертежом.
Регулятор режимов работы ГТД содержит последовательно соединенные блок вычисления ошибки регулирования 1, цифровой регулятор частоты вращения ротора ГТД 2, устройство сравнения 3, усилитель 4, дозатор 5, измеритель 6, выход которого связан с вторым входом устройства сравнения 3. Цифровой регулятор частоты вращения ротора ГТД 2 содержит блок датчиков 7, выход которого связан с входом функциональных блоков 8 и 9, выходы которых, в свою очередь, связаны соответственно с первыми входами блоков умножения 10 и 11, вторые входы которых связаны с выходом соответственно интегратора 12 и пропорционального звена 13, входы которых связаны с выходом блока ошибки регулирования 1. Скорректированные в блоках умножения 10 и 11 соответственно интегральная и пропорциональная составляющие цифрового регулятора 2, сигналы суммируются в сумматоре 14, а выход сумматора 14 соединен с первым входом устройства сравнения 3.
Способ регулирования режимов работы ГТД заключается в формировании ошибки регулирования частоты вращения путем ее вычисления в блоке 1 вычисления ошибки регулирования и передаче на вход цифрового регулятора частоты вращения ротора ГТД 2. Структура цифрового регулятора 2, приведенного на чертеже, получена в результате проведения машинного синтеза алгоритма оптимального дискретного управления контуром частоты вращения ротора ГТД. Используя метод переменного коэффициента усиления в пространстве состояния, передаточная функция цифрового регулятора может быть представлена к виду
D(z) 
 (1) где М(z) выходная последовательность регулятора;
(1) где М(z) выходная последовательность регулятора;
Е(z) входная последовательность регулятора;
α1 пропорциональная составляющая сигнала регулятора;
β1 интегральная составляющая сигнала регулятора;
z-1 оператор дискретного сдвига на шаг влево.
Приведен (1) к разностному выражению
М(z) M(z)z-1 α1E(z) + β1E(z)z-1. (2)
Поскольку z-1 означает сдвиг на шаг влево, то после преобразования имеют алгоритм управления
Мl Ml-1 + α1E1 + β1El-1, (3) где El-1, Ml-1 сигнал ошибки и сигнал управления на предыдущем шаге квантования;
Еl, Ml сигнал ошибки и сигнал управления на текущем шаге квантования.
Используя метод прямого программирования, после соответствующих преобразований, получают структуру цифрового регулятора, приведенного на чертеже.
При наличии сигнала ошибки регулирования частоты вращения на входе цифрового регулятора 2 происходит выделение интегральной 12 и пропорциональной 13 составляющих указанной ошибки, которые с целью повышения точности корректируют пропорционально изменению по меньшей мере одного из внутридвигательных параметров, измеряемых блоком датчиков 7. Коррекция интегральной и пропорциональной составляющих происходит в блоках умножения 10 и 11. Эту операцию можно описать в виде:
T' TA8 и Р' PA9 (4) где Т, Р интегральная и пропорциональная составляющие цифрового регулятора (выходной сигнал блока 12 и 13 соответственно);
Т', Р' скорректированные интегральные и пропорциональная составляющие регулятора (выходной сигнал блоков 10 и 11 соответственно);
А8, А9 значения выходной координаты функциональных блоков 8 и 9 соответственно.
Операция формирования функциональных зависимостей производится в соответствии с выражением:
A8,9=K1X1+ + KnXn K1Xi
K1Xi
(5) где А8,9 выходная величина функционального блока 8 и 9 соответственно;
Кl весовой коэффициент влияния контролируемого параметра на регулирование частоты вращения ротора ГТД;
Хl значение контролируемого параметра, измеряемого l-м датчиком блока датчиков 7.
Блок датчиков 7 содержит набор датчиков, контролирующих параметры переменных (частоты вращения, давления, температуры газов в различных сечениях двигателя), всех тех, которые в какой-либо степени (прямо или косвенно) влияют на регулирование частоты вращения ротора ГТД.
Указанные значения контролируемых параметров, умноженные на соответствующие весовые коэффициенты влияния, суммируются в функциональных блоках 8 и 9. Таким образом происходит формирование функциональных зависимостей. Скорректированные интегральная и пропорциональная составляющие ошибки регулирования суммируют в сумматоре 14 и формируют управляющее воздействие на расход топлива пропорционально полученной сумме.
Цифровой регулятор 2 частоты вращения ротора ГТД с коppекцией его интегральной и пропорциональной составляющих повышает качество управления режимами работы ГТД за счет уменьшения ошибки регулирования в контуре частоты вращения путем решения задачи о максимальном быстродействии системы, возбуждаемой воздействием вида ступенчатой функции. Под максимальным быстродействием здесь понимается свойство системы отрабатывать входные воздействия вида ступенчатой функции без перерегулирования за конечное и минимальное время. Выходной сигнал управления цифрового регулятора 2 формирует заданное положение Yзад дозатора 5, которое в устройстве сравнения 3 сравнивается с измеренным Yизм. и по величине рассогласования
Δ Y Yзад. Yизм. (6) в усилителе 4 формируется расчетное управляющее воздействие
lрасч К1 ΔY (7) (где К1 расчетная характеристика усилителя 4), подаваемое на дозатор 5. Измеритель 6 производит определение фактического расхода топлива, поступающего в газотурбинный двигатель, и подает этот сигнал на вычитающий вход устройства сравнения 3. Таким образом цепь замыкается.
Технико-экономическая эффективность изобретения заключается в повышении качества управления двигателя путем уменьшения ошибки регулирования в контуре частоты вращения ротора ГТД, что подтверждается результатами моделирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1990 |
|
SU1760800A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2425255C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
RU2007599C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634997C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2432501C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422682C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2446298C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2014 |
|
RU2555784C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ СО СВОБОДНОЙ ТУРБИНОЙ | 2004 |
|
RU2282737C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
Использование: регулирование газотурбинных двигателей. Сущность - формируется ошибка регулирования частоты вращения, выделяются пропорциональная и интегральная составляющие ошибки, суммируются составляющие и формируется управляющее воздействие на расход топлива пропорционально полученной сумме. Дополнительно измеряют по меньшей мере один из внутридвигательных параметров и пропорционально его величине корректируют обе составляющие ошибки. 1 ил.
СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ РАБОТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ путем формирования ошибки регулирования частоты вращения, выделения пропорциональной и интегральной составляющих ошибки, суммирования составляющих и формирования управляющего воздействия на расход топлива пропорционально полученной сумме, отличающийся тем, что, с целью повышения точности, дополнительно измеряют по меньшей мере один из внутридвигательных параметров, пропорционально величине которого корректируют пропорциональную и интегральную составляющие ошибки.
| Ту Ю | |||
| Современная теория управления | |||
| М.: Машиностроение, 1971, с.472. |
