ФиМ
Изобретение относится к области сельскохозяйственного машиностроения, в частности к машинам для сбора плодов.
Цель-повышение эффективности работы устройства.
На фиг.1 изображен общий вид стряхи- вателя, вид сзади; на фиг.2 - схема взаимодействия гребенки и пальцев.
Стряхиватель плодов содержит основание 1, на котором установлены привод 2 и рама 3. С приводом 2 кинематически связан вал 4.
На валу 4 установлены по винтовой линии упругие пальцы 5 серповидной формы.
Пальцы 5 установлены с возможностью регулирования угла наклона в плоскости, перпендикулярной оси вала 4. Винтовая ли- ния,пр которой установлены пальцы 5,имеет не менее двух витков. На основании 1 и на раме 3 с возможностью вертикального перемещения установлена гребенка 6. Вертикальное перемещение осуществляет механизм 7, например гидроцилиндр, величина вертикального перемещения гребенки составляет 1/8 длины пальцев 5. Для приема снятых плодов с кроны деревьев устанавливается улавливатель 8.
Ул а и вател ь у ста н а вл и ва ют н а п ер&- движное транспортное средство и перемещают вдоль ряда деревьев, Пальцы 5, вращаясЦвнёдряются в кройу, встречая сопротивление ветвей и одновременно смещаясь вдоль ряда, пальцы 5 вибрируют, а выходя из-под нагрузки вётвей совершают сложное хаотическое движение, вынуждая
колебаться контактирующие с ними ветви деревьев в близлежащей зоне пальцев 5. Плоды, отрываясь, падают на улавливающее устройство 8.
При использовании стряхивателя на уборке плодов с тонкими ветвями для увеличения амплитуды вибрации пальцев им дополнительно сообщается вибрация за счет контакта с гребенкой 6. Для этого посредством механизма 7 гребенка вводится в зону контакта с пальцами 5. Величина зоны перекрытия пальцев 6 и гребенки 7 зависит от толщины ветвей и может достигать 1 /8 длины пальцев 5,
При контакте пальцев 5 с гребенкой 6 пальцы в своем движении отклоняется от обычной траектории, получают дополнительную кинетическую энергию за счет кратковременного зацепления с гребенкой
и колеблются с большей амплитудой.
Ф о р м у л а и з о б р е т е н и я. Стряхиватель плодов, содержащий установленные на раме ходовой части рабочие органы в виде размещенных на вертикальном валу эластичных пальцев и привод, о т л и ч а и и с я тем, что, с целью повышения эффективности работы устройства, эластичные пальцы установлены на валу по винтовой линии с возможностью регулирования угла наклона относительно оси вала, причем на раме смонтирована пальцевая гребенка, имеющая механизм вертикального перемещения.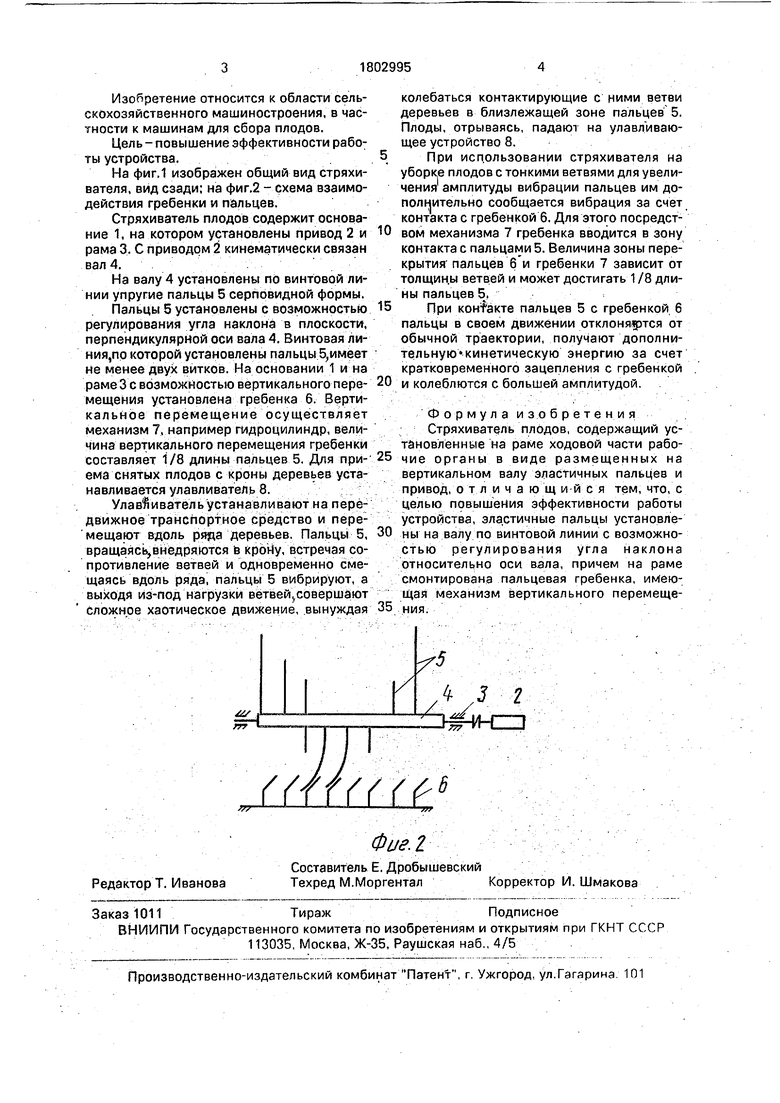
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЯХИВАТЕЛЬ ПЛОДОУБОРОЧНОГО КОМБАЙНА | 1997 |
|
RU2116021C1 |
| ЭЛЕКТРИФИЦИРОВАННОЕ УСТРОЙСТВО ДЛЯ СТРЯХИВАНИЯ КЕДРОВЫХ ШИШЕК С ДЕРЕВЬЕВ | 2021 |
|
RU2777467C1 |
| УСТРОЙСТВО ДЛЯ УБОРКИ ПЛОДОВ ФУНДУКА | 1992 |
|
RU2076567C1 |
| ПАТЕНТНО-ТГли^ГГ ?;:,::БИБЛИО' • КА | 1971 |
|
SU308712A1 |
| Плодоуборочная машина | 1987 |
|
SU1521351A1 |
| Устройство для сбора плодов | 1980 |
|
SU938814A1 |
| ПЛОДОУБОРОЧНАЯ МАШИНА | 1998 |
|
RU2161397C2 |
| ПЛАТФОРМА ДЛЯ СБОРА ПЛОДОВ | 2013 |
|
RU2539203C1 |
| УСТРОЙСТВО ДЛЯ СБОРА ПЛОДОВ | 1973 |
|
SU376058A1 |
| Улавливатель плодов | 1982 |
|
SU1101196A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для сбора плодов. Целью изобретения является повышение эффективности сбора плодов за счет увеличения полноты их съема. Поставленная цель достигается тем, что в стряхивателе плодов, содержащем основание с расположенными на нем приводом и кинематически связанной с ним рамой, на валу которой установлены пальцы 5 серповидной формы, на основании установлена гребенка 6, снабженная механизмом вертикального перемещения, пальцы установлены по винтовой линии не менее чем в два витка с возможностью регулирования угла наклона в плоскости, перпендикулярной оси вала, а пальцы выполнены упругими. Пальцы внедряются в крону, смещаясь одновременно вдоль ряда, и одновременно вибрируют, стряхивая плоды. 2 ил.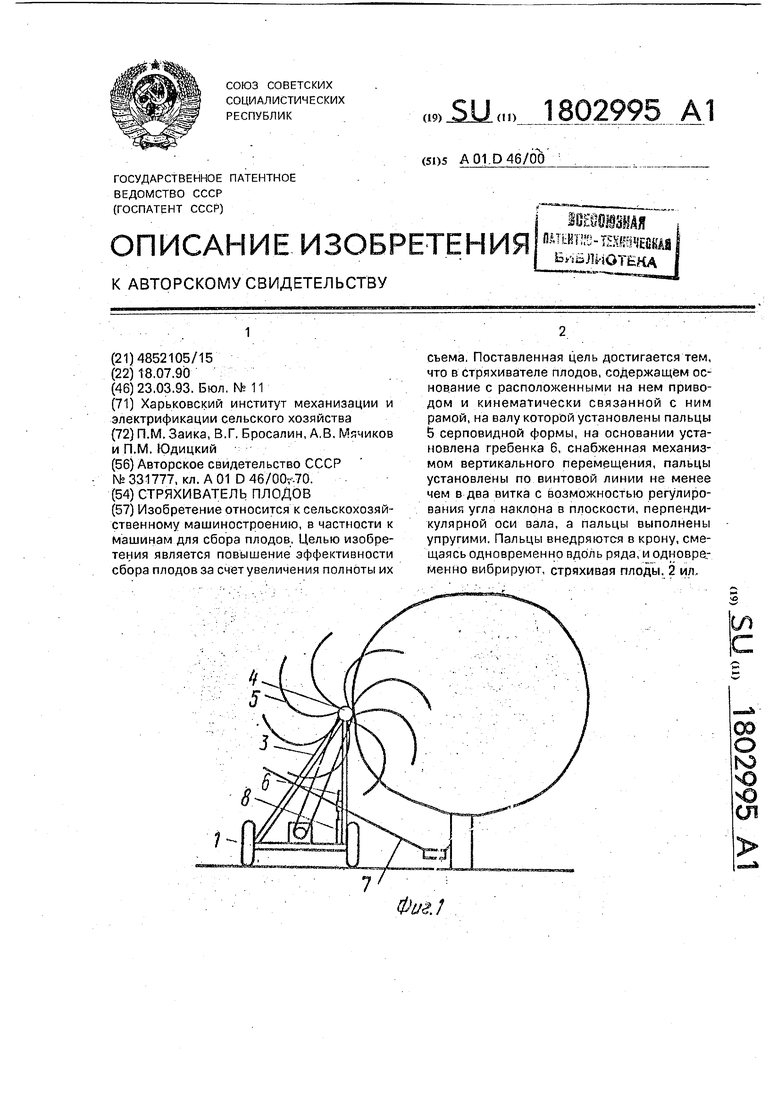
| МАШИНА ДЛЯ СБОРА ЯГОД С КУСТОВВСГСОЮЗНАЯnATiiiiutj U к;-;;|^Е;'кд[||ВИБЛИО-ЕКА | 0 |
|
SU331777A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
