Изобретение относится к области ма- ш ностроения, а именно к конструкции прессов.
Целью изобретения является повышение надежности и упрощение конструкции пресса.
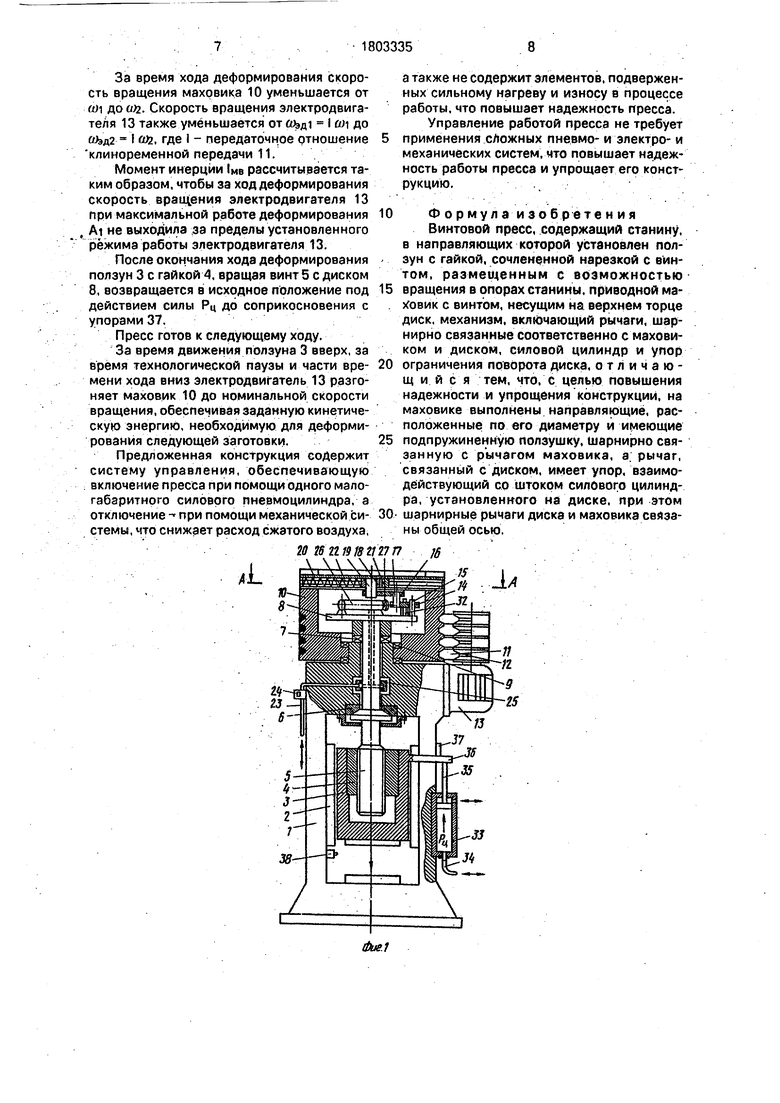
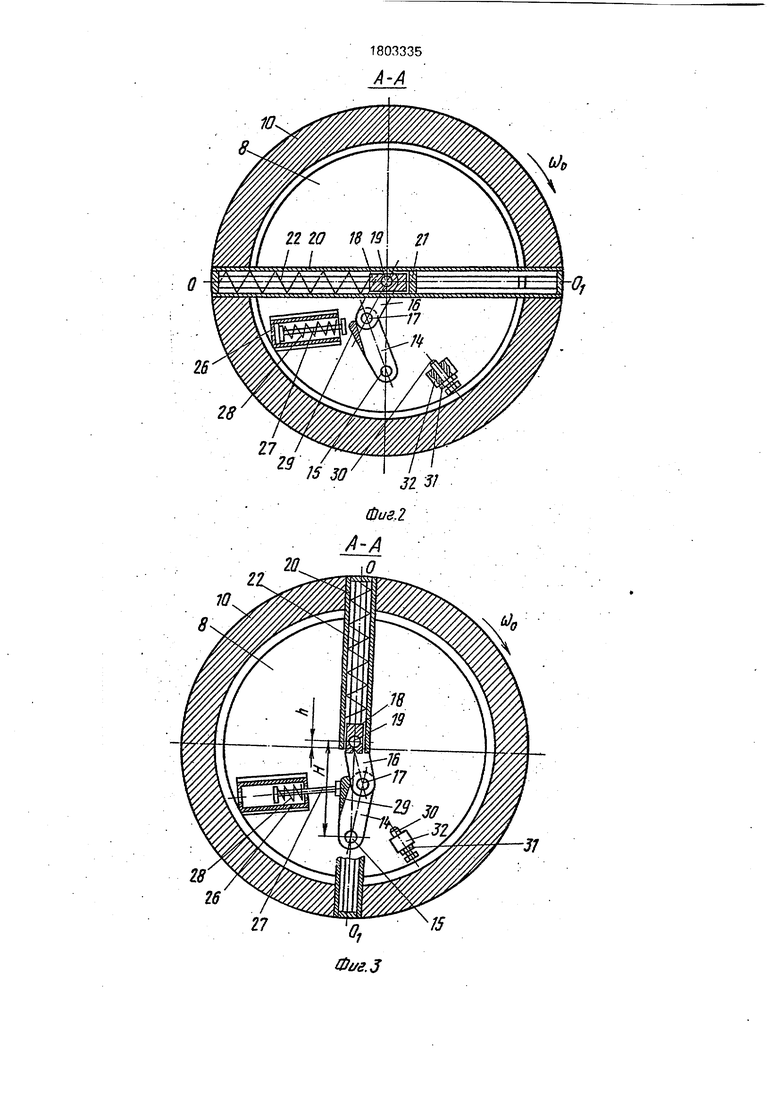
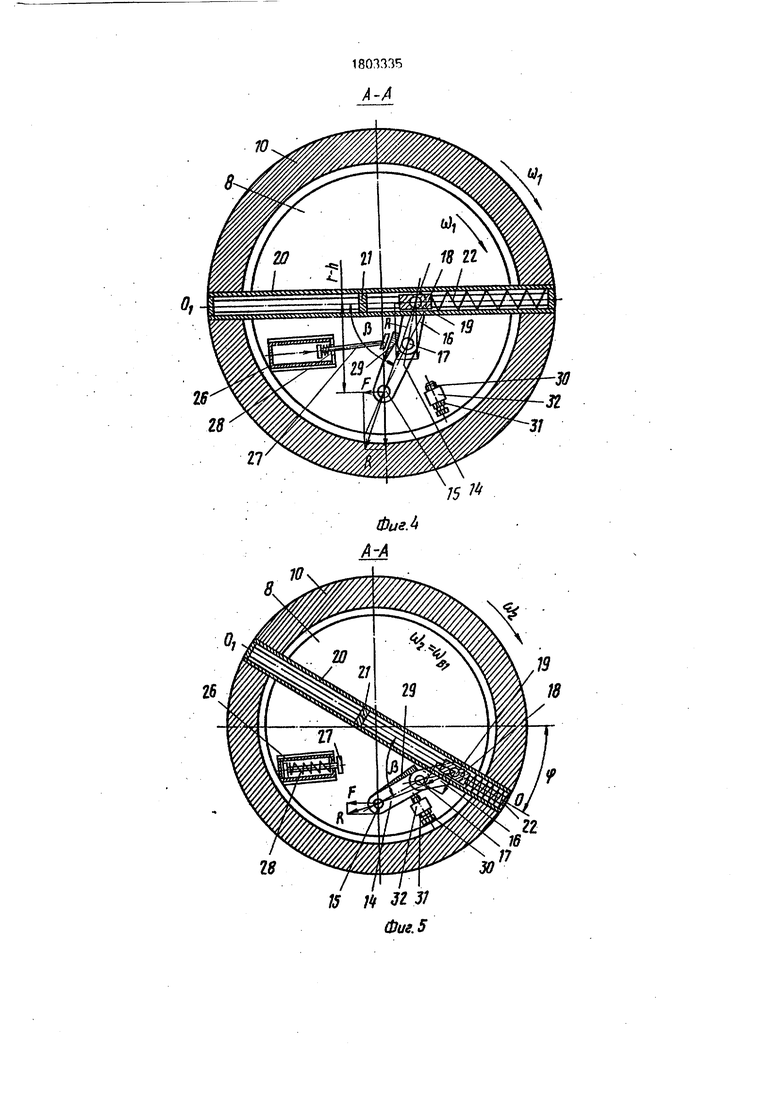
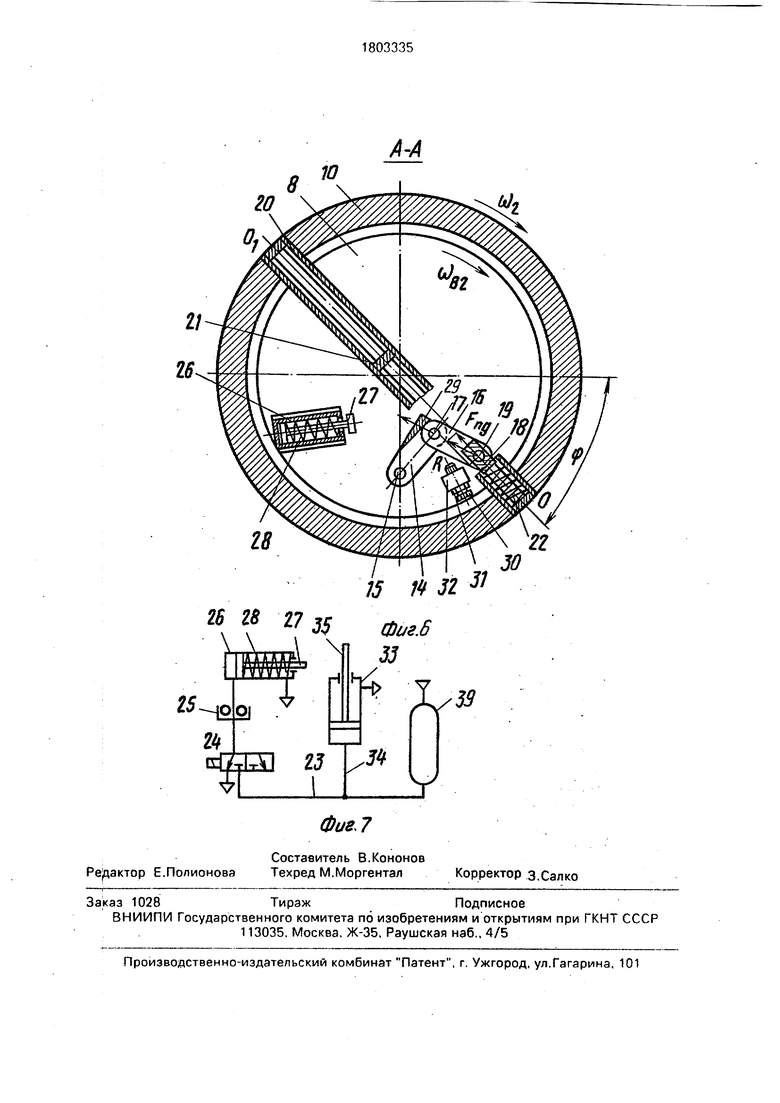
На фиг.1 изображен общий вид пресса с частичными разрезами; на фиг.,2 - разрез А -А на фиг,1 (при отключенной системе управления пресса); на фиг.3-то же, в момент si лючения системы управления пресса; на ф1г.4 - то же, при включенной системе уп- р (вления пресса; на фиг.5 - то же, в момент о ключения системы управления пресса; на ф 1Г.6 - то же, при возвратном ходе ползуна П| jecca,- на фиг.7 - пневмосхема пресса. у Винтовой пресс содержит станину 1, в направляющих 2 которой установлен ползун 3, с которым жестко связана гайка 4. сопряженная с винтом5, установленным подвижно в опорах станины 1, состоящих из п дпятн.ика 6 и подшипника 7. На верхнем торце винта 5 закреплен диск 8. На станине 1 на подшипниках 9 установлен маховик 10,
который через клийоременную передачу 11 и шкив 12 связан с электродвигателем 13. Диск 8 связан с рычагом диска 14 осью 15. С рычагом диска 14 связан рычаг маховика 16 при помощи оси 17. Рычаг маховика 16 связан с ползушкой 18 осью 19. Полэушка 19 установлена подвижно в направляющей 20. которая жестко закреплена на маховике 10. Для ограничения перемещения полэуш- ки 18 предусмотрен упор 21. Ползушка 18 взаимодействует с маховиком 10 посредством пружины 22. Для управления прессом предусмотрен трубопровод 23, соединенный через пневмораспределитель 24 с воз- духопроводящей втулкой 25, установленной на винте 5. В верхней части винта 5 выполнено отверстие, соединяющее воздухопод- водящую втулку 25 с силовым цилиндром 26, жестко закрепленным на диске 8.
Шток 27 силового цилиндра 26 подпружинен пружиной 28 и имеет возможность взаимодействия с упором 29, установленным на рычаге диска 14. Для ограничения поворота рычага диска 14 предусмотрен реы
ы
Ј
00
о
со
(л СО СЛ
гулируемый упор, выполненный в виде болта 30 с контргайкой 31, установленного на резьбе в кронштейне 32, который жестко закреплен на диске 8. Для возвратного хода ползуна 3 предусмотрены цилиндры 33, установленные на станине 1. Нижние полости цилиндров 33 соединены с трубопроводом 34, а верхние - с атмосферой. Штоки 35 цилиндров 33 связаны с кронштейнами 36, а последние установлены на ползуне 3. Для ограничения крайнего верхнего положения ползуна 3 на станине 1 установлены упоры
37. Пресс оснащен электропереключателем
38. а также ресивером 39.
Пресс работает следующим образом.
Нижние полости цилиндров 33 постоянно находятся под давлением Р сжатого воздуха, поступающего из магистрали через ресивер 39 и трубопровод 34.
Под действием усилия
Р S-Gn.
где S - площадь поршней цилиндров 33;
Gn - вес ползуна 3 (и других деталей, жестко связанных с ползуном 3), штоки 35 через кронштейны 36 удерживают ползун 3 в крайнем верхнем положении, ограниченном упорами 37. Винт 5 с диском 8 также неподвижны. Пневмораспредели- тель 24 отключен, полости силового цилиндра .26 соединены с атмосферой. Включается электродвигатель 13, который через шкив 12 и клиноременную передачу 11 разгоняет маховик 10 до заданной угловой скорости од. Маховик 10 запасает кинетическую энергию: :
5 поступает в полость цилиндра 26. При этом поршень силового цилиндра 26 сжимает пружину 28 и передает через шток 27 усилие Q Р Si (где Si - площадь поршня
5 силового цилиндра 26) упору 29 рычага диска 14, перемещая последний при повороте маховика 10 в положение, показанное на фиг.З, до соприкосновения упора 29 с рычагом маховика 16. Таким образом, управле10 ние работой пресса осуществляется одним малогабаритным силовым цилиндром 26, что снижает расход воздуха. Между рычагом диска 14 и рычагом маховика 16 образуется мертвый угол, что обеспечивает невоз15 можность поворота рычага маховика 16 относительно-рычага диска 14 от действия любой силы, направленной от оси 19 к оси 15. -.-
Происходит также перемещение оси 19
20 относительно оси 15 на величину h (фиг.З), при этом ось 19 смещается относительно оси вращения маховика 10 на величину h. Ось 19 воздействует на ползушку 18, и последняя смещается вдоль направляющей
25 20, одновременно сжимая пружину 22 на величину h.
При дальнейшем повороте маховика 10 с направляющей 20 и ползушкой 18, ось 19 стремится повернуться по окружности ра30 диусом h. Однако этому препятствует рычаг диска 14 и рычаг маховика 16. находящиеся в неподвижном положении относительно друг друга и имеющие возможность вращения только вокруг оси 15, закрепленной на
35 неподвижном диске 8. Поэтому ось 19 совершает поворот по дуге с центром на оси 15 и радиусом
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой пресс | 1989 |
|
SU1662868A1 |
| Винтовой пресс | 1987 |
|
SU1489997A1 |
| Винтовой пресс | 1983 |
|
SU1172745A1 |
| Винтовой пресс двойного действия | 1977 |
|
SU658005A1 |
| ВИНТОВОЙ ПРЕСС | 1993 |
|
RU2063341C1 |
| Винтовой пресс | 1990 |
|
SU1750955A1 |
| Винтовой пресс | 1984 |
|
SU1183394A1 |
| Винтовой пресс двойного действия | 1983 |
|
SU1147593A1 |
| Винтовой пресс | 1989 |
|
SU1646892A1 |
| Винтовой пресс | 1980 |
|
SU944949A1 |
Использование: машиностроение, а именно - конструкции прессов. Сущность изобретения: конструкция винтового пресса содержит ползун с гайкой, винт, приводной маховик с винтом, несущим на верхнем торце диск, механизм связи маховика и диска. Механизм включает шарнирные рычаги, силовой цилиндр, упор ограничения поворота диска, выполненные на маховике направляющие, расположенные по его диаметру и имеющие подпружиненную ползуш- ку, шарнирно связанную с рычагом маховика. Рычаг, связанный с диском, имеет упор, взаимодействующий со штоком силового цилиндра, установленного на диске, при этом шарнирные рычаги диска и маховика связаны общей осью. 7 ил.
Т 1М ОДГ/2
где 1м - момент инерции маховика 10.
Ползушка 18 прижата пружиной 22 к упору 21, который установлен таким образом, чтобы обеспечивать совпадение центра оси 19 с осью вращения маховика 10. Происходит вращение маховика 10 с направляющей 20 и ползушкой 18 вокруг неподвижной оси 19 (фиг.2). Ось 15 установ- ле мд на неподвижном диске 8. Поэтому рычаг диска 14 и рычаг маховика 16, установленные на осях 15 и 19, также неподвижны.
Для включения рабочего хода пресса подается команда на включение пневморас- пределйтеля 24, который осуществляет включение системы управления пресса. Сжатый воздух из ресивера 39 через трубопровод 23, пневмораспределитель 24, ьозду- хоподводящую втулку 25 и отверстие винта
40
455055
г п + гг,.
где п - расстояние между центрами осей 15 и 17;
га - осей 17 и 19.
При этом происходит увеличение величины смещения осей вращения маховика 10 и оси 19. Ползушка 18 продолжает перемещаться вдоль направляющей 20, увеличивая величину сжатия пружины 22, которая развивает усилие Рп. Через ползушку 18, ось 19, рычаг маховика 16, ось 17, рычаг диска 14 и ось 15, диск 8 воспринимает усилие
R Fn/cos/9(3) где /8 - угол между осью OOi, направляющей 20 и линией, соединяющей центры осей 15 и 19.
От действия усилия R создается усилие F, направленное по касательной к радиусу (r-h) вращения центра оси 15
F R cos(/S - p
(4)
где р- угол поворота направляющей 20 (на . 0). От действия F на диске 8 возни- ка0т крутящий момент:5
М « F (r-h) Fn (r-h) cos(jf -p)/cos Ј(5)
Момент М с диска 8 передается на диск 5, который стремится повернуться в гайке 4. В 10 резьбе гайки 4 возникает усилие Р, которое передается на ползун 3 и направлено вниз
Р
2М
DC tg («+/)
2Fn (r-h)-cos(j8-y) DC tg (а +/э) cos/
где DC. a ,p- средний диаметр, угол накло- на и угол трения .резьбы винта 5. При возра- Fn до определенного значения Fni (фиг.4) усилие Р достигает величины Р Рц, после чего ползун 3 перемещается вниз, происходит вращение винта 5 в гайке 4. Во врэмя хода вниз ползун 3 через кронштей- нь 36 перемещает штоки 35, которые вытес- няот сжатый воздух из цилиндров 33 через трубопровод 34 в ресивер 39. Винт 5 и ма- хозик 10 вращаются как одно целое с угловой скоростью сот и кинетической энергией:
Тэм IMB W1 /2
(7)
гд } 1мв 1м + IB - суммарный момент инерции маховика 10, винта 5 и других деталей, жестко связанных с маховиком 10 и винтом 5. Ползун 3 перемещается вниз до соприкосновения инструмента с заготовкой (не по- ). При этом корпус ползуна 3 взаимодействует с электропереключателем 38, который подает сигнал на отключение пн|евмораспределителя 24, При этом сжатый воздух из силового цилиндра 26 сбрасывается в атмосферу и пружина 28 возвращает шток 27 в исходное положение (фйг.5).
Во время соприкосновения инструментах заготовкой и ее деформировании ползун 3 с гайкой 4 затормаживаются, что пр иводит также к затормаживанию винта 5 с диском 8 до угловой скорости од. При этом происходит дальнейшее перемещение пол- зу«Ьки 18 вдоль направляющей 20 и сжатие пружи ы 22. Происходит также поворот рычага ди- ска 14с рычагом маховика 16 относительно центрЬ оси 15 до соприкосновения рычага диска 14 с регулируемым упором - болтом 30, по;сле чего рычаг диска 14с осью 17 враща
5
0
5
0
5
0
5
ются как одно целое с диском 8. Полэушка 18 продолжает перемещаться вдоль направляющей 20, а рычаг маховика 16 поворачивается относительно центра оси 17, после чего рычаг диска 14 и рычаг маховика 16 выходят из мертвого угла (фиг.5). Регулируемый упор - болт 30 настраивается таким образом, что в момент выхода из мертвого угла пружина 22 сжимается на такую величину, что создает усилие РПд, соответствующее заданному усилию Рд на ползуне 3, необходимому для деформирования заготовки
Рп 2FnA-(r-h)-cos(/3-y) (8) . дDc-tg(a+p)-cos/ Происходит поворот рычага маховика 16 и рычага диска 14 в положение, показанное на фиг.6. Усилие R не передается на ось 15, а следовательно и момент М - на винт 5.
Система управления пресса отключена. Ползушка 18 под действием усилия Рпд возвращается в исходное положение - до соприкосновения с упором 21 (фиг.2). Центр оси 19 совпадает с осью вращения маховика 10,-происходит свободное вращение махо-. вика 10 и ползушки 18 относительно оси 19, а значит - и относительно винта 5.
В процессе деформирования заготовки с момента соприкосновения ее с инструментом до момента отключения системы управления пресса работа деформирования осуществляется кинетической энергией маховика 10 и винта 5
Ai- ДТэ1 1мв(йЛ2-ОД22)/2
(9)
40
Дальнейшее деформирование заготовки до смыкания матриц инструмента происходит за счет энергии винта 5:
А2 ДТэ2 18(о,)/2
(Ю)
гдже r/fei - угловая скорость вращения винта 5 в момент отключения системы управления пресса, (Ом - угловая скорость вращения винта 5 в конце хода деформирования.
Работа упругого деформирования пресса и инструмента Аз после смыкания матриц инструмента осуществляется оставшейся кинетической энергией винта 5:
Аз ДТэз вМв22/2(11) Винт 5 останавливается. Маховик 10 продолжает ускоренно вращаться под действием момента, развиваемого электродвигателем 13.
За время хода деформирования скорость вращения махрвика 10 уменьшается от й л до «г. Скорость вращения электродвигателя 13 также уменьшается от %ji I wi до I °й, где I - передаточное отношение клиноременной передачи 11.
Момент инерции 1Мв рассчитывается таким образом, чтобы за ход деформирования скорость вращения электродвигателя 13 при максимальной работе деформирования Ai не выходила за пределы установленного режима работы электродвигателя 13.
После окончания хода деформирования ползун 3 с гайкой 4, вращая винт 5 с диском 8, возвращается в исходное положение под действием силы Рц до соприкосновения с
упорами 37.
Пресс готов к следующему ходу.
За время движения ползуна 3 вверх, за время технологической паузы и части времени хода вниз электродвигатель 13 разгоняет маховик 10 до номинальной скорости вращения, обеспечивая заданную кинетическую энергию, необходимую для деформирования следующей заготовки.
Предложенная конструкция содержит систему управления, обеспечивающую включение пресса при помощи одного малогабаритного силового пневмоцилиндра, а отключение при помощи механической системы, что снижает расход сжатого воздуха,
а н ра
5 п н р
10
, з
15 в
20 о
25 п
30-
,L
И 16111918112717
а также не содержит элементов, подверженных сильному нагреву и износу в процессе работы, что повышает надежность пресса.
Управление работой пресса не требует применения сложных пневмо- и электро- и механических систем, что повышает надежность работы пресса и упрощает его конструкцию..
0 формула изобретения
Винтовой пресс, содержащий станину, в направляющих которой установлен ползун с гайкой, сочлененной нарезкой с винтом, размещенным с возможностью
5 вращения в опорах станины, приводной маховик с винтом, несущим на верхнем торце диск, механизм, включающий рычаги, шар- нирно связанные соответственно с маховиком и диском, силовой цилиндр и упор
0 ограничения поворота диска, отличаю- щ и и с я тем, что, с целью повышения надежности и упрощения конструкции, на маховике выполнены направляющие, расположенные по его диаметру и имеющие
5 подпружиненную ползушку, шарнирно связанную с рычагом маховика, а. рычаг, связанный с диском, имеет упор, взаимодействующий со штоком силового цилиндра, установленного на диске, при этом
0- шарнирные рычаги диска и маховика связаны общей осью.
V-V
scctost
v-ч
9Ш081
Фиг,7
Редактор Е.Полионова
Составитель В.Кононов Техред М.Моргентал
Корректор З.Салко
