®иг.1 :
Изобретение относится к области машиностроения, а именно к механическим передачам.
Цель изобретения - повышение надежности.
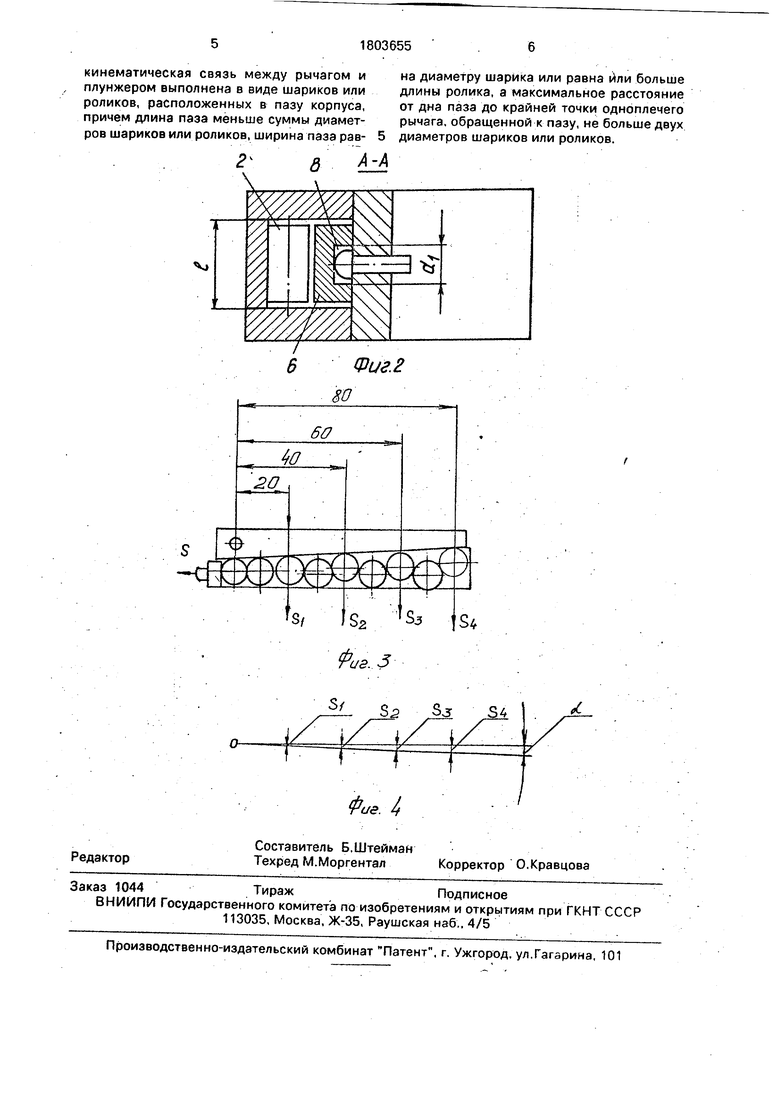
На фиг.1 изображен механизм преобразования качательного движения в прямолинейное возвратно-постунательное движение, общий вид; на фиг,2 - разрез А-А на фиг.1; на фиг.З и 4 - пример расчета перемещений, ,
Механизм преобразования качательного движения в прямолинейное возвратно- поступательное движение состоит из корпуса 1, имеющего базовый торец А, тел качения 2, расположенных в пазуЗ шириной I, плунжера 4, имеющего базовый торец Б, пружины 5, одноплечего рычага 6, шарнир-. но закрепленного на оси 7 и имеющего выемку 8 шириной di, крышки 9 с опорными поверхностями Си В. В .отверстии rfкрышки 9 установлен толкатель 10,
Механизм преобразования качательного движения в прямолинейное возвратно- поступательное движение работает следующим образом.
При прижатии опорных поверхностей С и В крышки 9 к базовой поверхности резцедержателя 11 резец контактирует с торцем толкателя 10, который, перемещаясь вдоль оси отверстия d, перпендикулярного дну е паза 3 корпуса 1, сферическим основанием через выемку 8 нажимает на одноплечий рычаг б, большая сторона которого обращена к дну е паза 3, Рычаг 6, совершая кача- тельное движение вокруг оси 7, взаимодействует стелами качения 2, находящимися в емкости, ограниченной шириной паза 3, дном е паза и одноплечим рычагом 6. При этом длина паза 3 меньше суммы, диаметров тел качения 2, ширина I паза 3 равна диаметру шарика или равна или больше длины ролика, а максимальное расстояние от дна е паза 3 до крайней точки одноплечего рычага 6, обращенной к пазу 3, не больше двух диаметров тел качения 2. Тела качения 2, перемещаясь по дну е паза 3 взаимодействуют с плунжером 4 и перемв; щают его вдоль оси отверстия Ж. На торце плунжера имеется базовая поверхность Б, которая в контрольном положении должна совпадать с поверхностью А для контроля измерения на ощупь или на глаз. Пружина 5 служит для возвратно-поступательного перемещения плунжера 4.
В данном механизме путем преобразования качательного движения одноплечего рычага 6 в прямолинейно-поступательное перемещение плунжера 4 происходит умножение перемещения толкателя 10.
Принимаем в длину от оси 7 вращения одноплечего рычага б до конца паза 3 85 мм (см, фиг.З), а расстояние от оси вращения 7 рычага 6 до места контакта толкателя 10 с
выемкой 8 рычага - 20 мм. Пусть большая сторона рычага 6, обращенная ко дну е паза 3, контактирует с шариками на расстоянии 20 мм, 40 мм, 60 мм и 80 мм. При необходимости переместить резец вниз (см, фиг.1) на
0,01 мм соответствен но на такую же величину переместится толкатель 10 в отверстии d, а рычаг 6 повернется на какой-то угол а, при этом легко установить, что перпендикуляр, опущенный из любой точки рычага 6
относительно начального положения, будет примерно равен расстоянию от оси вращения 7 рычага 6 до его начального положения, умноженному на.
a.S2-40tg a; $3 60tg а;
S4 80 tg . a .
отсюда
25
- S3 S 4
20 40 60 80
Если толкатель переместился на Si «0,01мм. то 82 -0,02 мм, 5з «0,03 мм, .$4 -0,04 мм.
Тела качения имеют круглую поверхность и перемещаются на величину, равную поперечному перемещению соприкасающегося с рычагом тела качения, Следовательно, длина перемещения плунжера 4 будет
равна сумме вертикальных перемещений тел качения
0
5
0
5
S Si + 82 + 5з + S4 0,01 + 0,02 + 0,03+ + 0,04 0,1мм.
По сравнению с прототипом данный механизм преобразования качательного движенияв прямолинейное возвратно-поступательное перемещение надежнее, так как в нем только одно шарнирное соединение, а также нет угловых усилий, действующих на плунжер. Формула изобретения Механизм преобразования качательного движения в прямолинейное возвратно- поступательное движение, содержащий корпус, установленный в нем с возможностью качательного движения одноплечий рычаг и кинематически связанный с рычагом плунжер,- установленный с возможностью возвратно-поступательного движения, отличающийся тем, что, с целью повышения надежности, плунжер подпружинен к корпусу, в корпусе выполнен паз, а
кинематическая связь между рычагом и плунжером выполнена в виде шариков или роликов, расположенных в пазу корпуса, причем длина паза меньше суммы диаметров шариков или роликов, ширина паза рав-
на диаметру шарика или равна или больше длины ролика, а максимальное расстояние от дна паза до крайней точки одноплечего рычага, обращенной к пазу, не больше двух диаметров шариков или роликов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕСМОДРОМНЫЙ ВАЛ И ВИЛКА В СБОРЕ ДЛЯ ПРЕОБРАЗОВАНИЯ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2597032C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2010 |
|
RU2447666C1 |
| Станок для хонингования шлицевых отверстий | 1972 |
|
SU484974A1 |
| ДИСКОВЫЙ ТОРМОЗ С ЗАМКОМ, ФИКСИРУЮЩИМ ПРЕОБРАЗУЮЩИЙ ДВИЖЕНИЕ ПАТРОН | 2011 |
|
RU2539436C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2008 |
|
RU2379897C1 |
| ТОПЛИВНЫЙ НАСОС | 1990 |
|
RU2008507C1 |
| Поворотный делительный стол | 1983 |
|
SU1114522A1 |
| Устройство для хонингования наружных поверхностей тел вращения | 1980 |
|
SU876393A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2008 |
|
RU2386257C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2118472C1 |
Изобретение относится к области машиностроения, а именно к механическим передачам. Цель изобретения - повышение надежности. Плунжер 4 подпружинен к пусу 1, в котором выполнен паз 3. Кинематическая связь между одноплечим рычагом 6 и плунжером 4 выполнена в виде тел качения 2, расположенных в пазу 3 корпуса 1. При перемещении толкателя 10 рычаг 6, совершая качательное движение вокруг оси 7, взаимодействует с телами качения 2, Тела качения 2, перемещаясь в пазу 3 корпуса 1, перемещают плунжер 4. 4 ил.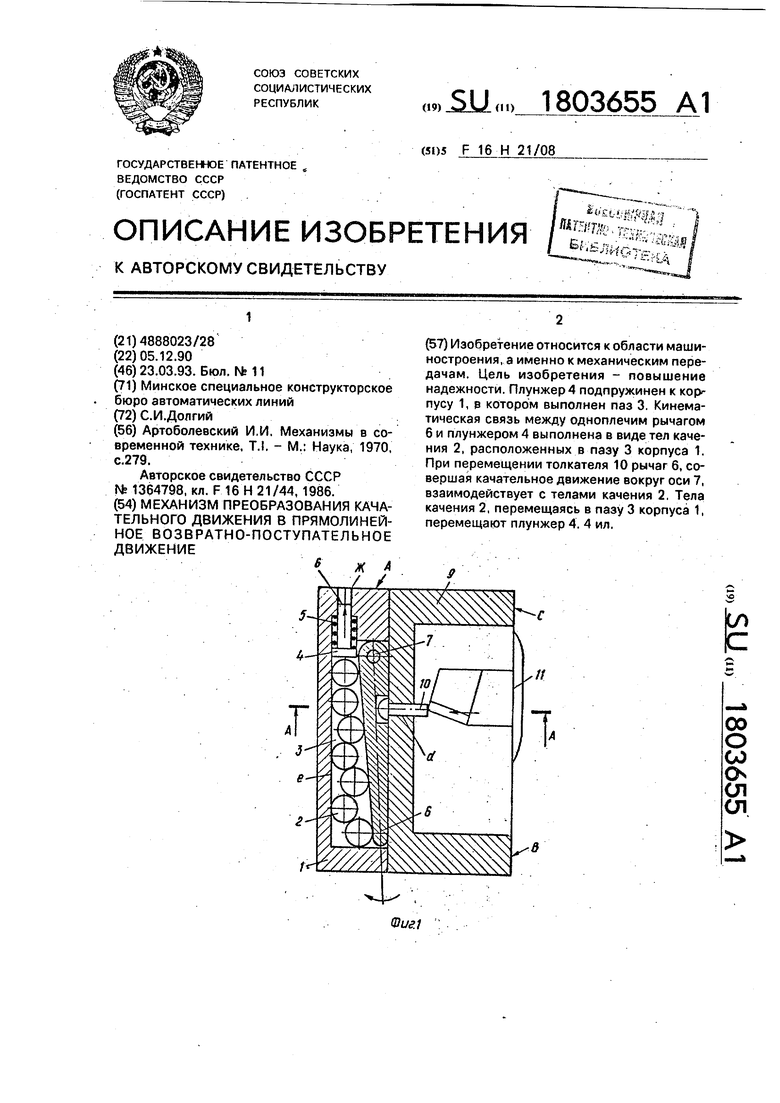
Риг.З
| Артоболевский И,И | |||
| Механизмы в современной технике, Т. | |||
| - М.: Наука, 1970, с.279 | |||
| Кривошипно-ползунный механизм | 1986 |
|
SU1364798A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
