Изобретение относится к вычислительной технике, а именно к устройствам измерения перемещений исполнительных органов машин (например, поршней, насосов), работающих во взрывоопасной среде на значительном удалении от остальной части системы управления и контроля.
Целью изобретения является повышение надежности и упрощение путем сокращения количества соединительных проводов, протянутых к удаленному и работающему во взрывоопасной среде датчику положения при сохранении возможности
определения этим датчиком направления движения.
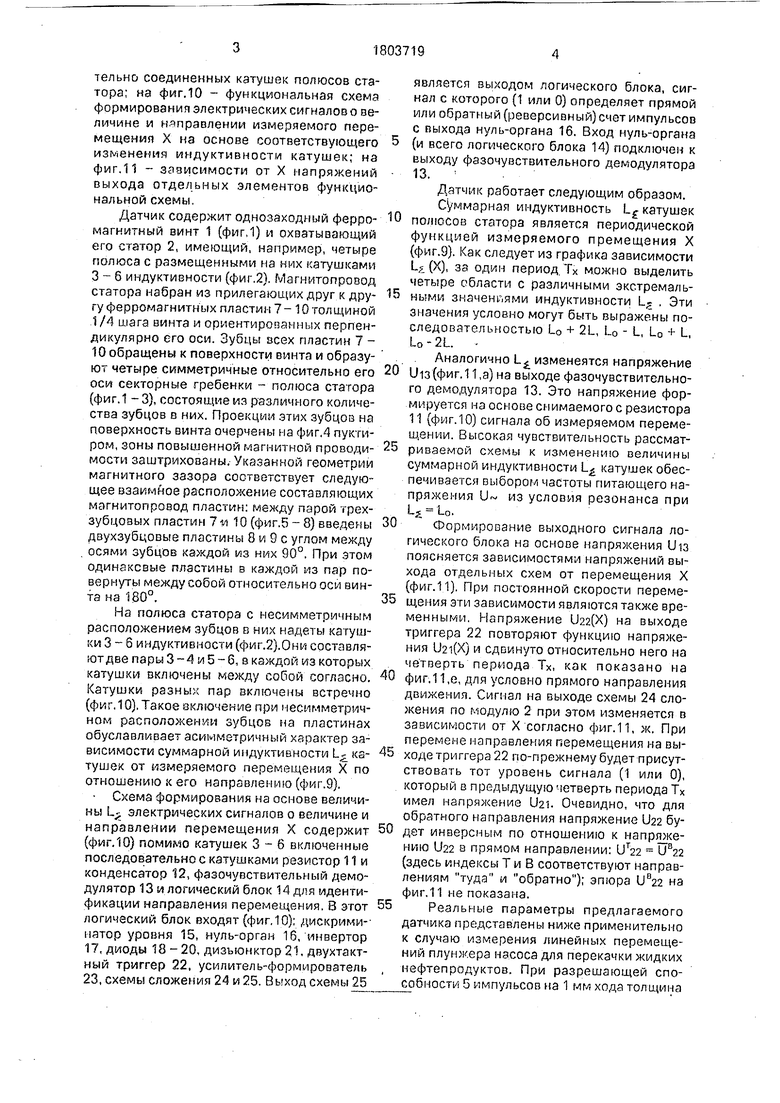
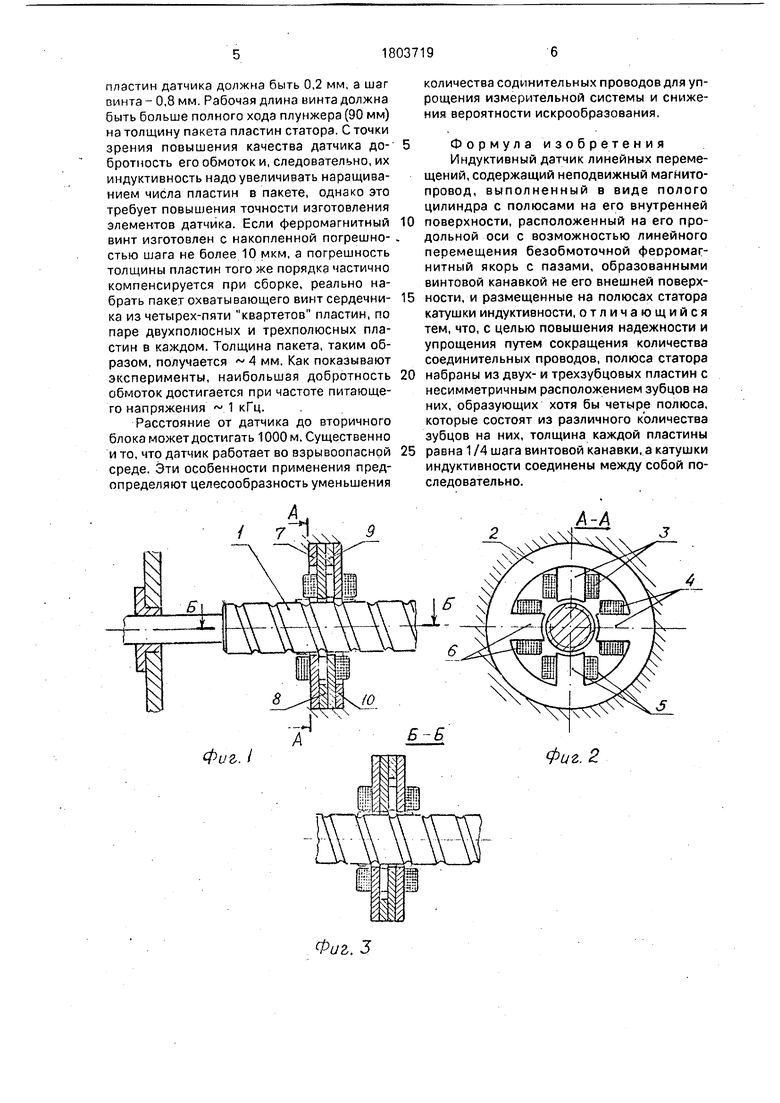
На фиг,1 представлено главное изображение конструкции индуктивного датчика линейных перемещений; на фиг.2 и 3 - поперечный разрез А-А и продольный горизонтальный разрез Б-Б; на фиг.4 - развертка поверхности якоря с показанными пунктиром проекциями на эту поверхность зубцов пластин статора; на фиг. 5-8 показаны образующие магнитопровод статора пластины в порядке их сборки; на фиг.9 - зависимость суммарной индуктивности L последовас о
СА)
Ю
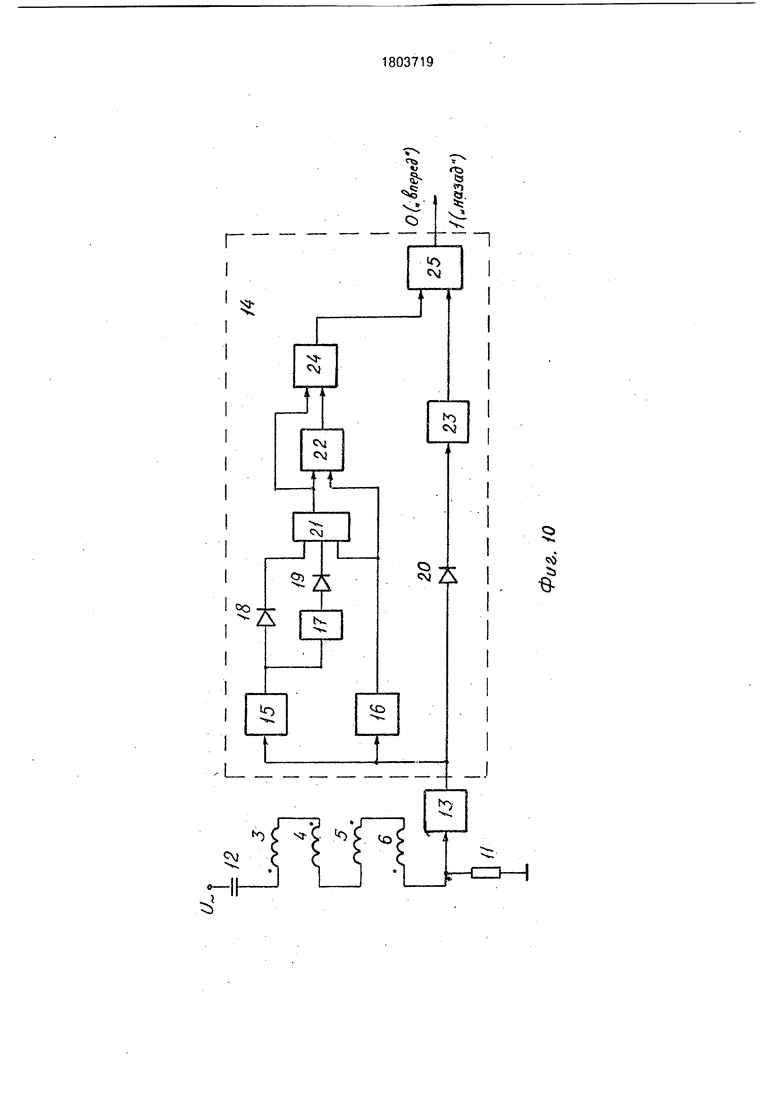
тельно соединенных катушек полюсов статора; на фиг.10 - функциональная схема формирования электрических сигналов о величине и направлении измеряемого перемещения X на основе соответствующего изменения индуктивности катушек; на фиг.11 - зависимости от X напряжений выхода отдельных элементов функциональной схемы.
Датчик содержит однозаходный ферромагнитный винт 1 (фиг,1) и охватываюа1ий его статор 2, имеющий, например, четыре полюса с размещенными на них катушками 3-6 индуктивности (фиг,2). Магнитопровод статора набран из прилегающих друг, к другу ферромагнитных пластин 7- 10 толщиной .1/4 шага винта и ориентированных перпендикулярно его оси. Зубцы scex пластин 7 - 10 обращены к поверхности винта и образуют четыре симметричные относительно его оси секторные гребенки - полюса статора (фиг.1 - 3), состоящие из различного количества зубцов в них. Проекции этих зубцов на поверхность винта очерчены на фиг. 4 пукти- ром, зоны повышенной магнитной проводимости заштрихованы,-Указанной геометрии магнитного зазора соответствует следующее взаимное расположение составляющих магнитопровод пластин: между парой трех- зубцовых пластин 7м 10 (фиг.5 - 8) введены двухзубцовые пластины 8 и 9 с углом между осями зубцов каждой из них 90°. При этом одинаковые пластины в каждой из пар повернуты между собой относительно оси винта на 180°.
На полюса статора с несимметричным расположением зубцов в них надеты катушки 3 - 6 индуктивности (фиг.2).0ни составляют две пары 3 -4 и 5 - 6, в каждой из которых катушки включены между собой согласно. Катушки разных пар включены встречно (фиг.10). Такое включение при несимметричном расположении зубцов на пластинах обуславливает асимметричный характер зависимости сумр арной индуктивности L катушек от измеряемого перемещения X по отношению к его направлению (фиг.9).
Схема формирования на основе величины L электрических сигналов о величине и направлении перемещения X содержит (фиг.10) помимо катушек 3-6 включенные последовательно с катушками резистор 11 и конденсатор 12, фазочувствительный демодулятор 13 и логический блок 14 для идентификации направлении перемещения, В этот логический блок входят (фиг.10); дискрими-- иатор уровня 15, нуль-орган 16, инвертор 17, диоды 18 - 20, дизъюнктор 21. двухтактный триггер 22, усилитель-формирователь 23, схемы сложения 24 и 25. Выход схемы 25
является выходом логического блока, сигнал с которого (1 или 0) определяет прямой или обратный (реверсивный) счет импульсов с выхода нуль-органа 16. Вход нуль-органа
(и всего логического блока 14) подключен к выходу фазочувствительного демодулятора 13.
Датчик работает следующим образом. Суммарная индуктивность Ј катушек
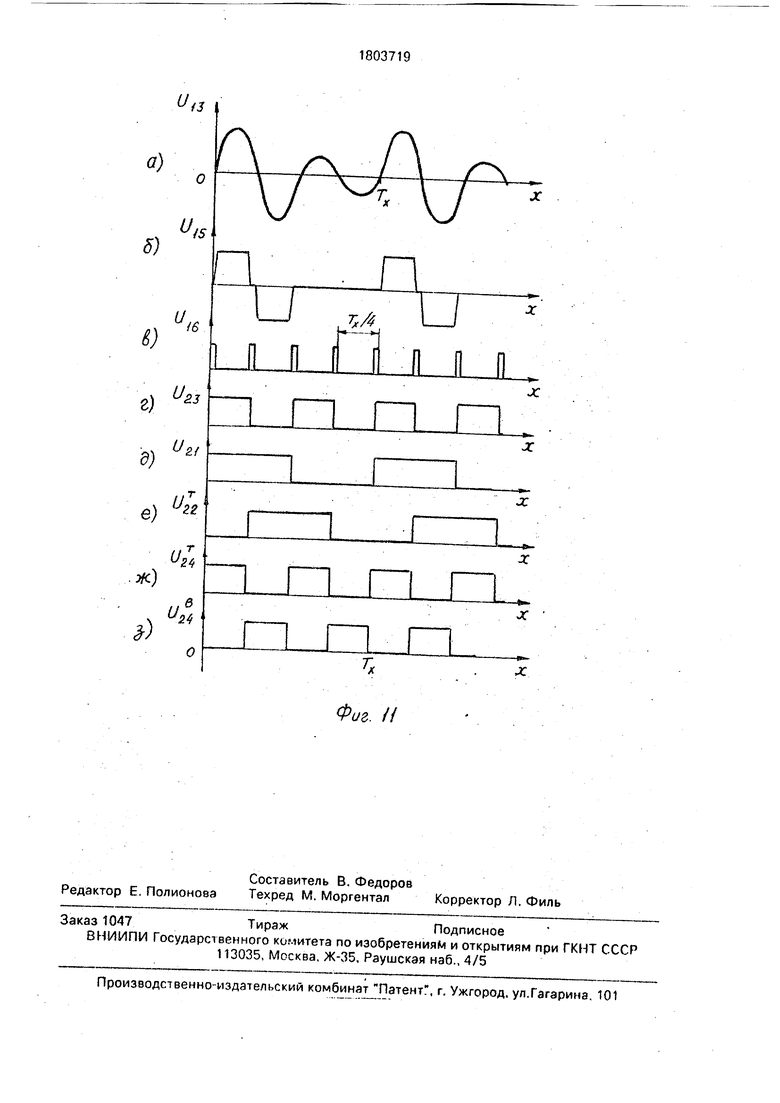
0 полюсов статора является периодической функцией измеряемого премещения X (фиг.9). Как следует из графика зависимости LЈ (X), зз один период. Тх можно выделить четыре области с различными экстремаль5 ными значениями индуктивности L- . Эти значения условно могут быть выражены последовательностью LO + 2L, U - L, Lo + L, U-2L Аналогично Ј изменеятся напряжение
0 Ui3 (фиг. 11 ,а) на выходе фазочувствительного демодулятора 13. Это напряжение формируется на осноЕзе снимаемого с резистора 11 (фиг.10) сигнала об измеряемом перемещении. Высокая чувствительность рассмат5 риваем ой схемы к изменению величины суммарной индуктивности Lg катушек обеспечивается выбором частоты питающего напряжения U из условия резонанса при Lf - Lo.
0 Формирование выходного сигнала логического блока на основе напряжения 1Из поясняется зависимостями напряжений выхода отдельных схем от перемещения X (фиг. 1.1). При постоянной скорости переме5 щения эти зависимости являются также временными. Напряжение 1)22(Х) на выходе триггера 22 повторяют функцию напряжения lJ2i(X} и сдвинуто относительно него на четверть периода Тх, как показано на
0 фиг. 11,е, для условно прямого направления движения. Сигнал на выходе схемы 24 сложения по модулю 2 при этом изменяется в зависимости от X согласно фиг.11, ж. При перемене направления перемещения на вы5 ходе триггера 22 по-прежнему будет присутствовать тот уровень сигнала (1 или 0), который в предыдущую четверть периода Тх имел напряжение U21. Очевидно, что для обратного направления напряжение U22 бу0 дет инверсным по отношению к напряжению U22 в прямом направлении: UT22 US22 (здесь индексы Т и В соответствуют направлениям туда и обратно); эпюра UB22 на фиг. 11 не показана.
5 Реальные параметры предлагаемого датчика представлены ниже применительно к случаю измерения линейных перемещений плунжера насоса для перекачки жидких , нефтепродуктов. При разрешающей способности 5 импульсов на 1 мм хода толщина
пластин датчика должна быть 0,2 мм, а шаг винта - 0,8 мм. Рабочая длина винта должна быть больше полного хода плунжера (90 мм) на толщину пакета пластин статора. С точки зрения повышения качества датчика добротность его обмоток и, следовательно, их индуктивность надо увеличивать наращиванием числа пластин в пакете, однако это требует повышения точности изготовления элементов датчика. Если ферромагнитный винт изготовлен с накопленной погрешно- стью шага не более 10 мкм, а погрешность толщины пластин того же порядка частично компенсируется при сборке, реально набрать пакет охватывающего винт сердечника из четырех-пяти квартетов пластин, по паре двухполюсных и трехполюсных пластин в каждом. Толщина пакета, таким образом, получается 4 мм, Как показывают эксперименты, наибольшая добротность обмоток достигается при частоте питающего напряжения 1 кГц.
Расстояние от датчика до вторичного блока может достигать 1000м. Существенно и то, что датчик работает во взрывоопасной среде. Эти особенности применения предопределяют целесообразность уменьшения
количества содинительных проводов для упрощения измерительной системы и снижения вероятности искрообразования.
Формула изобретения
Индуктивный датчик линейных перемещений, содержащий неподвижный магнито- провод, выполненный в виде полого цилиндра с полюсами на его внутренней
поверхности, расположенный на его продольной оси с возможностью линейного перемещения безобмоточной ферромагнитный якорь с пазами, образованными винтовой канавкой не его внешней поверхности, и размещенные на полюсах статора катушки индуктивности, отличающийся тем, что, с целью повышения надежности и упрощения путем сокращения количества соединительных проводов, полюса статора
набраны из двух- и трехзубцовых пластин с несимметричным расположением зубцов на них, образующих хотя бы четыре полюса, которые состоят из различного количества зубцов на них, толщина каждой пластины
равна 1 /4 шага винтовой канавки, а катушки индуктивности соединены между собой последовательно.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2000 |
|
RU2197712C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ВИБРАТОР КРУТИЛЬНЫХ КОЛЕБАНИЙ | 2011 |
|
RU2466800C1 |
| Амортизатор на основе линейного электродвигателя | 2021 |
|
RU2763617C1 |
| Магнитоэлектрический генератор | 2018 |
|
RU2697812C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2015 |
|
RU2650879C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| Мотор-колесо для самолета | 2018 |
|
RU2703704C1 |
| ЛИНЕЙНЫЙ ЦИЛИНДРИЧЕСКИЙ ДВИГАТЕЛЬ | 2011 |
|
RU2483418C2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2509665C1 |
Изобретение относится к измерительной технике. Цель изобретения- повышение надежности и упрощение конструкции индуктивного датчика линейных перемещений винтового типа. Датчик содержит выполненный в виде полого цилиндра неподвижный магнитопровод, имеющий на внутренней поверхности полюса и установленный на его продольной оси с возможностью линейного перемещения безобмоточный ферромагнитный якорь с пазами, образованными винтовой канавкой на его внешней поверхности. Полюса статора набраны из двух- и трехзубцовых пластин с несимметричным расположением зубцов на них, которые образуют хотя бы четыре полюса, состоящих из различного количества зубцов в них. Толщина пластин, образующих полюса, равна 1/4 шага винтовой канавки, а размещенные на полюсах статора четыре катушки индуктивности соединены последовательно. Благодаря переменной площади полюсов, суммарная индуктивность катушек на полюсах статора, включенная в последовательный резонансный контур, изменяется нелинейно в функции линейного перемещения якоря, что позволяет упростить схему обработки сигналов и сократить количество соединительных проводов. 11 ил. ел G
Фаг. 3
0
U
16
г
д)
и
2/
е) и
и
24
U
в 24
Фиг. U
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Домрачев В.Г | |||
| и др | |||
| Схемотехника цифровых преобразователей перемещений | |||
| - М.: Энергоатомиздат, 1987, с,592 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Конюхов Н.Е | |||
| и др | |||
| Электромагнитные датчики механических величин | |||
| - М.: Машиностроение, 1987, с.222 - 224. | |||
