Предлагаемое изобретение относится к приборам контроля и регулирования технологических процессов.
Известен электромагнитный датчик линейных перемещений по авт. св. 1413408, МПК G 01 B 7/00, содержащий измерительную обмотку и установленный на ее оси с возможностью линейного перемещения якорь, состоящий из ферромагнитного и диамагнитного участков, между которыми размещена диэлектрическая вставка, имеющая одинаковую с ними длину, равную длине измерительной обмотки.
Недостатком датчика является значительная длина подвижного элемента, равная не менее двукратной величине его перемещения, а также то, что катушки выполнены однообмоточными, что уменьшает крутизну преобразования. Затруднено также выполнение резервных каналов.
Известен также электроиндуктивный датчик перемещений по авт. св. 443247, МПК G 01 B 7/00, содержащий каркасную многовитковую катушку с двумя обмотками, например, трапецеидальной формы и подвижный элемент, выполненный в виде нескольких последовательно соединенных пластин металлов с различной электропроводностью.
К недостаткам датчика можно отнести относительно малую крутизну преобразования и нелинейность характеристики на начальном и конечном участках диапазона.
Наиболее близким по технической сущности является принятый авторами в качестве прототипа функциональный индуктивный преобразователь перемещений по авт. св. 937992, МПК G 01B 7/00, содержащий ферромагнитный сердечник с полюсами и размещенные на нем последовательно соединенные катушки индуктивности и ферромагнитный якорь, установленный с зазором относительно поверхности полюсов сердечника в направлении измеряемого перемещения и выполненный с переменной шириной в поперечном сечении.
К недостаткам устройства можно отнести недостаточную крутизну характеристики преобразования из-за того, что на обоих полюсах происходит изменение проводимости одного знака, а также из-за того, что каждая из последовательно включенных катушек имеет только одну обмотку, кроме того, вследствие большой плоской поверхности якоря его размещение в изолирующем элементе в среде с избыточным давлением (в случае герметичного исполнения устройства) потребует большой толщины стенки, что резко уменьшит чувствительность и увеличит габариты. К недостаткам можно отнести также невозможность выполнения на одном ферромагнитном якоре дополнительных резервных измерительных каналов.
Задачей предлагаемого технического решения является упрощение конструкции многоканальных длинноходовых датчиков положения и сокращение их длины.
Для решения указанной задачи в датчике положения, содержащем магнитопровод, размещенные на магнитопроводе последовательно соединенные катушки индуктивности и якорь, по длине якоря выполнены зубцы, профилированные по ходу якоря, причем каждые два зубца, образующие один канал, профилированы симметрично в противоположных направлениях, магнитопровод установлен перпендикулярно ходу якоря и имеет такое же количество зубцов с катушками, как и количество зубцов якоря, при этом каждая катушка выполнена двухобмоточной, а обмотки, выполненные на разных зубцах одного канала, включены последовательно, якорь заключен в герметичный тонкостенный стакан из немагнитного материала.
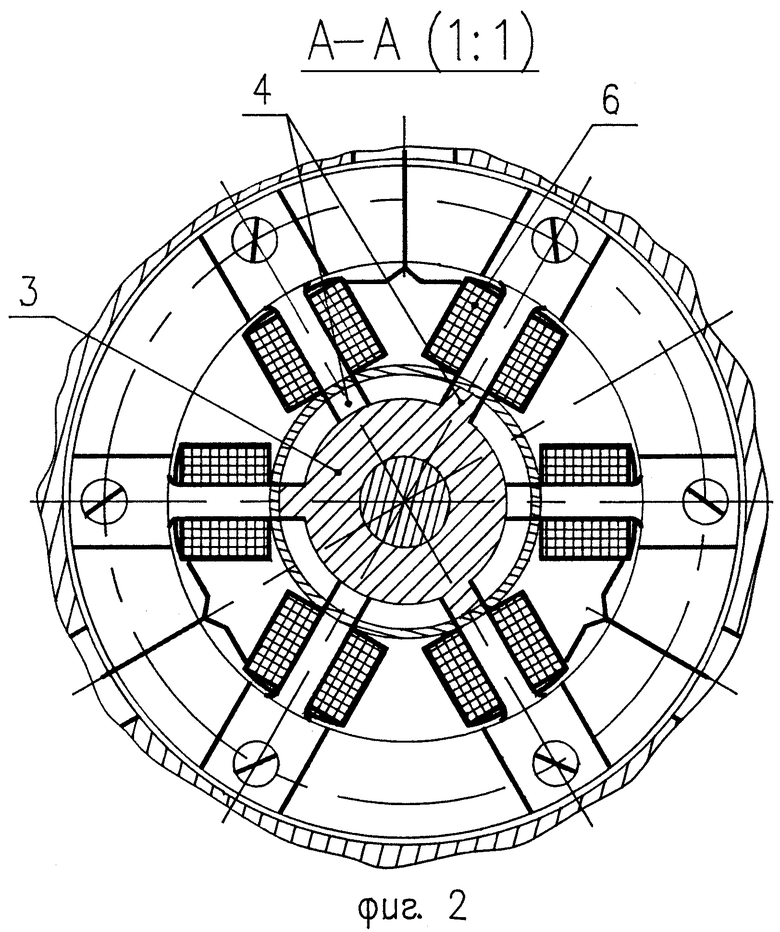
На фиг. 1 изображен разрез устройства по оси, на фиг.2 - разрез по А-А, на фиг.3 - электрическая схема устройства со схемой магнитопровода.
Датчик состоит из корпуса 1, в котором закреплен герметичный тонкостенный стакан 2 из немагнитного материала. Внутри стакана 2 перемещается якорь 3, выполненный из магнитомягкого материала. По длине якоря 3 выполнены зубцы 4, в количестве два на каждый канал, профилированные симметрично в противоположных направлениях.
На фиг. 1 представлен вариант трехканального датчика с шестью зубцами. Снаружи стакана 2 соосно с ним и перпендикулярно ходу якоря 3 в корпусе 1 закреплен магнитопровод 5, выполненный в виде диска с зубцами-стержнями, по количеству, соответствующему количеству зубцов якоря. На зубцах магнитопровода установлены катушки 6, каждая из которых выполнена двухобмоточной. Выходные концы катушек соединены параллельно и подключены к источнику переменного, например синусоидального, напряжения 7. Обмотки находящихся на противоположных по зазору зубцах 4 включены последовательно и подключены к электронному преобразующему устройству 8. Таким образом, обмотки катушек образуют полный перекрестный мост. Точки А и Б последовательного соединения обмоток образуют диагональ этого моста.
Датчик работает следующим образом. При поступательном движении якоря 3 меняется воздушный зазор Δ1 и Δ2 в магнитной цепи каждой катушки, причем изменение зазоров Δ1 и Δ2 между зубцами магнитопровода 5 и якоря 3 одного канала при перемещении якоря 3 противоположно. Это приводит к изменению индуктивных сопротивлений катушек 6 одного канала в противоположных направлениях, и на выходной диагонали моста получаем напряжение переменного тока, зависящее от положения якоря 3. Соответствующим профилированием зубцов по длине якоря достигается требуемая зависимость напряжения на выходе моста от перемещения якоря. Питание датчика может осуществляться напряжением прямоугольной или более сложной формы.
Заявляемое техническое решение, по мнению авторов, не является очевидным. Возможность применения изделия не вызывает сомнений, так как:
- изделие предназначено для использования в конкретной сфере народного хозяйства;
- реализация изделия возможна с помощью описанных в заявке технических средств;
- устройство способно обеспечить достижение заявленного технического эффекта;
- устройство технологично в изготовлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2485439C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
| Индукционный скважинный нагреватель | 2016 |
|
RU2620820C1 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2019 |
|
RU2707559C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| Устройство для перемещения материала | 1986 |
|
SU1355331A1 |
| Индуктивный датчик линейных перемещений | 1991 |
|
SU1803719A1 |

Датчик положения содержит магнитопровод, размещенные на магнитопроводе последовательно соединенные катушки индуктивности и якорь. По длине якоря выполнены зубцы, профилированные по ходу якоря. Каждые два зубца образуют один канал и профилированы симметрично в противоположных направлениях. Магнитопровод установлен перпендикулярно ходу якоря и имеет такое же количество зубцов с катушками, как и количество зубцов якоря, при этом каждая катушка выполнена двухобмоточной, а обмотки, выполненные на разных зубцах одного канала, включены последовательно. Технический результат - упрощение конструкции многоканального длинноходового датчика положения и сокращение его длины. 1 з.п. ф-лы, 3 ил.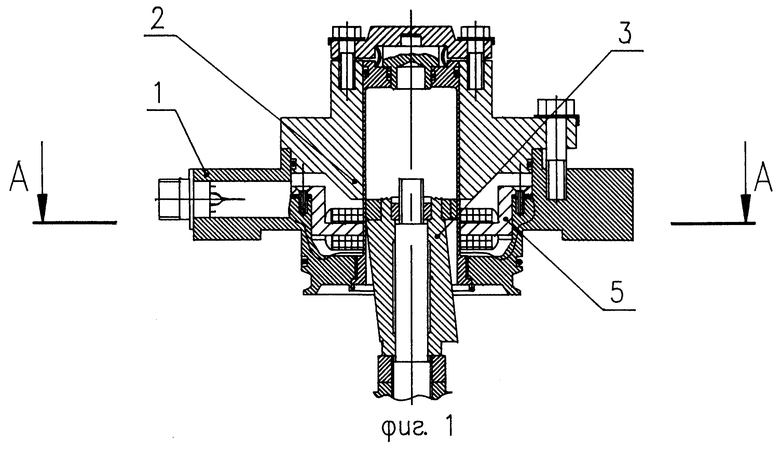
| Функциональный индуктивный преобразователь перемещений | 1980 |
|
SU937992A1 |
| Устройство для измерения перемещений | 1976 |
|
SU630521A1 |
| Дифференциально-транспортный датчик | 1979 |
|
SU769331A1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2037769C1 |
| US 5384534 A, 24.01.1995 | |||
| US 4792788 А, 02.12.1988. | |||

