Фиг.
00
о сь
я
МО
Изобретение относится к сельскохозяйственному машиностроению.
Целью изобретения является повышение надежности работы стоговоза за счет изменения клиренса.
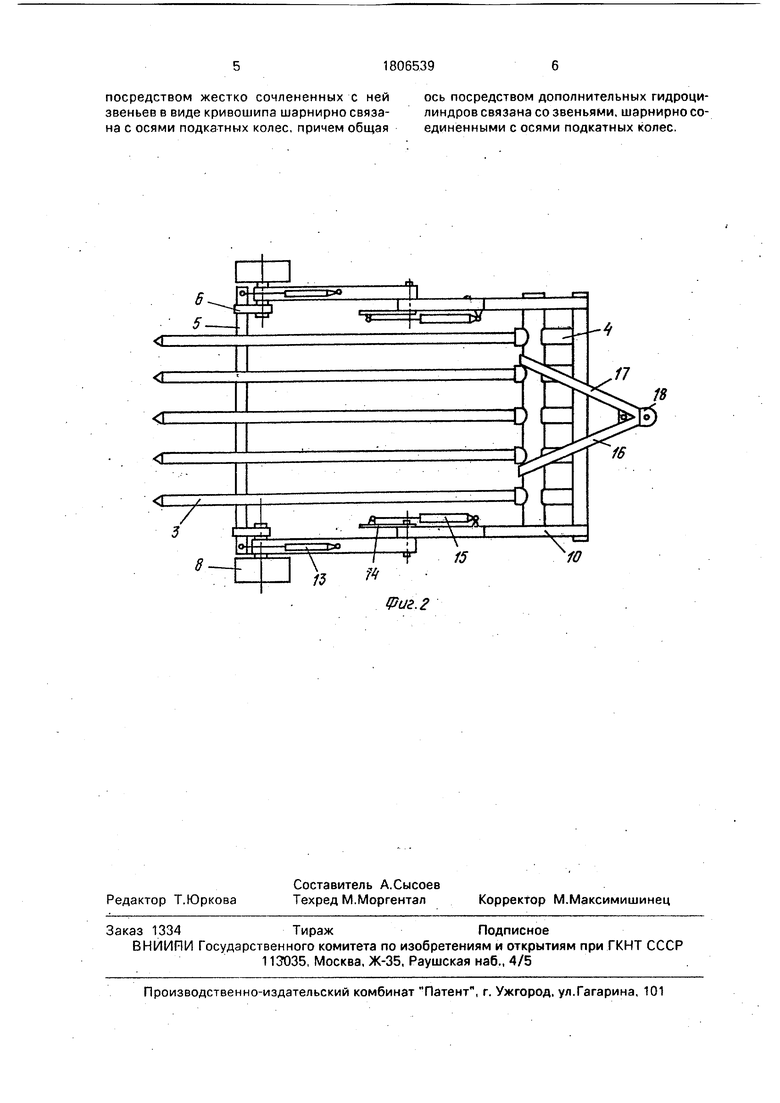
На фиг.1 представлена принципиальная схема стоговоза. вид сбоку; на фиг.2 - вид сверху,
Стоговоз включает раму, выполненную из пальцевого 1 и дополнительного 2 брусьев. На пальцевом брусе 1 консольно установлены продольные пальцы 3 посредством стаканов 4, представляющих собой, например, отрезки труб диаметром, обеспечивающим размещение в них пальцев 3 до упора в дополнительный брус 2. Рама стоговоза снабжена подводным мостом, имеющим ось 5 и жестко взаимосвязанные с ней через звенья 6 (с образованием кривошипа) оси 7 ходовых колес 8, Оси 7 ходовых колес 8 шарнирно связаны с рамой посредством шарнирно соединенных пар звеньев, одно 9 из которых в паре жестко взаимосвязано с рамой, а именно с пальцевым брусом 1, и через откос 10с дополнительным брусом 2, а другое звено 11 шарнирно связано с. осью 7 ходового колеса 8 и жестко с осью 12, шарнирно соединяющей его (звено 11) со звеном 9. Причем концы оси 5 подводного моста взаимосвязаны со штоками гидроцилиндров 13, установленных на звеньях 11, а на осях 12 установлены рычаги 14, взаимосвязанные посредством гидроцилиндров 15 со звеньями 9. жестко связанными с рамой стоговоза, а именно с брусьями 1 и 2. Рама стоговоза имеет прицепное устройство в виде двух спиц 16 и 17, заканчивающихся прицепной серьгой 18.
Работает стоговоз следующим образом.
Трактор доставляет стоговоз к стогу. Гидросистемой трактора раму стоговбза, а именно брусья 1 и 2, поднимают до максимального верхнего положения.Гидроцилиндрами 13 переводят ось 5, взаимосвязанную звеньями 6 с осями 7 ходовых колес 8, в нижнее положение. Концы пальцев 3 опираются на грунт и не касаются оси 5, поэтому она (ось 5)свободно выводится гидроцилиндрами 15, взаимосвязанными со звеньями 11 через рычаги 14, из-под пальцевой рамы за брусья 1 и 2. Гидросистемой Трактора посредством спиц 16 и 17 с серьгой 18 раму с пальцами 3 опускают на грунт и подталкивают под стог. Затем гидросистемой трактора раму стоговоза (а именно брусья 1 и 2) поднимают. Далее звеньями 11 под воздействием гидроцилиндров 15 выводят ось 5 с ходовыми колесами 8 из положения за брусьями 1 и 2 и подводит под пальцевую раму до упора в пальцы 3. Гидросистемой трактора поднимают раму стоговоза (пальцевый 1 и дополнительный 2 брусья). Затем включают в работу гидроцилиндры 13, которые переводят ось 5 (образующую кривошип вместе со звеньями 6, взаимосвязывающими ее с осями 7 ходовых колес 8) в верхнее положение (желательно минуя верхнюю мертвую точку, до положения, при котором концы оси 5 ложатся (опи0 раются) на звенья 11, при таком положении оси 5 гидроцилиндра 13 могут быть, отключены). Гидросистемой Yparropa раму стоговоза устанавливают в горизонтальное положение и стоговоз со стогом транспор5 тируют. После доставки стога к месту хранения гидросистемой трактора раму (брусья 1 и 2) стоговоза поднимают до крайнего верхнего положения, гидроцилиндрамй 13 ось 5 переводят в крайнее нижнее положение и
0 звеньями 11 под воздействием гидроцилиндров 15 выводят.из-под пальцевой рамы за брусья 1 и 2. Гидросистемой трактора раму с пальцами 3 опускают на грунт и выводят пальцы 3« из-под стога. Далее гидросисте5 мой трактора раму поднимают до крайнего верхнего положения, ось 5 звеньями 11 под воздействием гидроцилиндров 15 подводится под пальцевую раму до упора в пальцы 3, затем гидроцилиндрами 13 ось 5
0 переводится в верхнее положение, при котором концы оси 5 ложатся на звенья 11, .гидросистемой трактора пальцевую раму переводят в горизонтальное транспортное положение. Стоговоз готов к перевозке сле5 дующего стога.
При использовании предлагаемого стоговоза можно изменять в широком диапазо- не расстояние между общей осью подкатных колес и поверхностью, по кото0 рой перемещается стоговоз, что, в свою очередь, позволяет исключить повреждение стоговоза при его транспортировке на участках со сложным рельефом местности, не- равностями дорог, почвы, а также
5 обеспечить равномерное распределение нагрузки на общую ось ходовых колес и навеску трактора.
Формула изобретения . Полунавесной стоговоз, содержащий
0 раму, опирающуюся на подкатные колеса, расположенные по обеим сторонам рамы на общей оси, механизм подкатывания колес в виде шарнирно соединенных пар звеньев, одно из каждой их пары связано с рамой, а
5 между собой каждая пара звеньев связана гидроцилиндром, отличающийся тем, что, с целью повышения надежности работы стоговоза за счет изменения клиренса, другое звено из каждой их пары шарнирно связано с осью подкатного колеса, а общая ось
51806539 6
посредством жестко сочлененных с нейось посредством дополнительных гидроцизвеньев в виде кривошипа шарнирно связа-линдров связана со звеньями, шарнирно сона с осями подкатных колес, причем общаяединенными с осями подкатных колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТОГОВОЗ | 1994 |
|
RU2080047C1 |
| СТОГОВОЗ | 1995 |
|
RU2092014C1 |
| АГРЕГАТ ДЛЯ УБОРКИ СТОГОВ | 1997 |
|
RU2121780C1 |
| Полунавесной стоговоз | 1989 |
|
SU1720549A1 |
| Стоговоз | 1978 |
|
SU1256723A1 |
| Стоговоз полунавесной | 1988 |
|
SU1544264A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПОГРУЗКИ, ПЕРЕВОЗКИ И РАЗГРУЗКИ РУЛОНОВ | 1996 |
|
RU2108022C1 |
| СТОГОВОЗ | 2000 |
|
RU2189131C2 |
| ЗАХВАТ К ПОГРУЗОЧНО-ТРАНСПОРТНЫМ МАШИНАМ | 1968 |
|
SU209295A1 |
| Стоговоз | 1988 |
|
SU1792585A1 |
Использование: сельскохозяйственное машиностроение. Сущность изобретения: стоговоз имеет раму, опирающуюся на расположенные по обеим ее сторонам, и установленные на общей оси подкатные колеса, пальцевую платформу, механизм подкаты- вания колес в виде связанных с брусом 2 звеньев 9 и 11, взаимосвязанных между собой гидроцилиндрами 15. Подкатные колеса связаны с общей осью посредством звеньев 6 (с образованием кривошипа). Кроме того, общая ось взаимосвязана со звеньями 11 дополнительными гидроцилиндрами 13, 2 ил.
Фиг. 2
| Стоговоз | 1978 |
|
SU1256723A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стоговоз полунавесной | 1988 |
|
SU1544264A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
