Изобретение относится к регулятору проскальзывания ведущих колес для транспортных средств, в котором оценивается поведение колес транспортного сред- ства при вращении, в случае наблюдения чрезмерного проскальзывания ведущих колес понижается мощность привода на ведомые колеса и/или ведомые колеса затормаживаются.
Цель изобретения - улучшение регулятора проскальзывания ведущих колес указанного типа до такой степени, чтобы он точнее работал.
Эта задача решается
а) путем оценки поведения неведомых колес транспортного средства при вращении, которая определяется, обусловлена ли разница в частоте вращения правого и левого колес движением на повороте, причем регулятор проскальзывания ведущих колес занимает положение включения только в случае, если оценка дает положительный результат.
б) частруы вращения ведомы, колес сравнивают с опорным значением (VRef) таким образом, что в случае, если сравниваемое значение больше заданного порогового значения, осуществляются мероприятия для ограничения проскальзывания ведущих колес, -,
в) опорное значение (VRef) представляет собой среднее арифметическое значение окружных скоростей неведомых колес.
Выгодные и улучшенные варианты осуществления изобретения изложены в зависимых пунктах формулы изобретения.
Согласно изобретению сначала проверятся, обусловлены ли возможные разницы в частоте вращения левого и правого контрольных колес движением на повороте или другими влияниями, в частности использованием противоблокировочного устройства. Если оценка показывает, что разница в частоте вращения неведомых колес одного моста не обусловлена движением на повороте (т.е. она обусловлена, например, регулироСЛ
С
со
О
VI о ел
го
00
ванием тормозных сил), то регулятор проскальзывания ведущих колес занимает положение выключения. Если опорная скорость выведена из неведомых колес, то проскальзывание ведущих колес можно регулировать только в случае отсутствия разницы в частоте вращения неведомых колес (движение по прямой) или в случае движения на повороте.
Затем образуется особенным образом опорное значение для имитации скорости транспортного средства, а именно - из среднего значения частот вращения или соответственно окружных скоростей обоих неведомых колес одного моста. Этим можно исключить влияние неисправностей движения на повороте, так как среднее значение (среднее арифметическое значение) практически соответствует скорости, с которой двигалось бы неведомое колесо, расположенное точно в середине между обоими упомянутыми колесами.
Согласно варианту осуществления изобретения, в котором опорное значение модифицируется аддитивным значением поправки, причем значение поправки пропорционально разнице в частоте вращения (Vi-Va) обоих неведомых колес и тем самым радиусу кривизны пройденного поворота, учитывается при образовании опорного значения также радиус кривизны поворота. На очень крутых по&ротах с малым радиусом кривизны разница в частоте вращения левого и правого колес больше, чем на протяженных поворотах с большим радиусом кривизны.
Согласно варианту осуществления изобретения, в котором значение оправки модифицировано дополнительным поправочным коэффициентом (k), учитывающим влияние базы, учитывается еще и длина транспортного средства. В случае транспортных средств с очень длинной базой задние колеса относительно сильно срезают угол на повороте, так что регулирование проскальзывания, рассчитанное на опорное значение, оказалось бы ошибочным.
Согласно варианту осуществления изобретения, в котором дополнительный поправочный коэффициент является отрицательным и составляет 0,5 до 1, предпочтительно от 0,7 до 0,8, предлагается осо- бенно выгодный, эмпирически определенный поправочный коэффициент. С помощью варианта осуществления изобретения, в котором аддитивное значение поправки представляет собой абсолютное значение разницы окружных скоростей (Vi -Va) обоих неведомых колес, достигается то. что опорная скорость не зависит от направления поворота (поворот налево или направо).
Согласно варианту осуществления изобретения, в котором регулятор проскальзы- вания ведущих колес занимает положение включения только в случае соблюдения всех следующих условий:
а) разница в частоте вращения обоих неведомых колес меньше заданного значе- ния,
б) разница ускорений обоих неведомых колес меньше заданного порогового значения,
в) абсолютное значение ускорения каж- 5 дого неведомого колеса меньше заданного предельного значения,
г) указанные условия а), б) и в) соблюдены в течение заданного отрезка времени,, представляется простой и наглядный метод
0 определения движения на повороте.
Согласно варианту осуществления изобретения, в котором заданный отрезок времени составляет 1-2 с, предпочтительно 1,2 с, представляется особенно выгодное, эм5 лирически определенное значение для одного из указанных параметров.
Здесь следует еще отметить, что при движении на повороте опорная скорость .транспортного средства может значительно
0 отличаться от его действительной скорости (в расчете на центр транспортного средства). Опорное значение для скорости транспортного средства при движении на повороте выбрано с умыслом, так как в ре5 зультате изменения опорной скорости транспортного средства относительно его действительной скорости получается эффект регулирования пороговых значений. Это дает то большое преимущество, что не0 обходимо изменить только один параметр - . опорную скорость, а не большое количество пороговых значений, так что при использовании изобретения уменьшаются расходы на изготовление и в случае использования
5 микропроцессора - расходы на программирование.
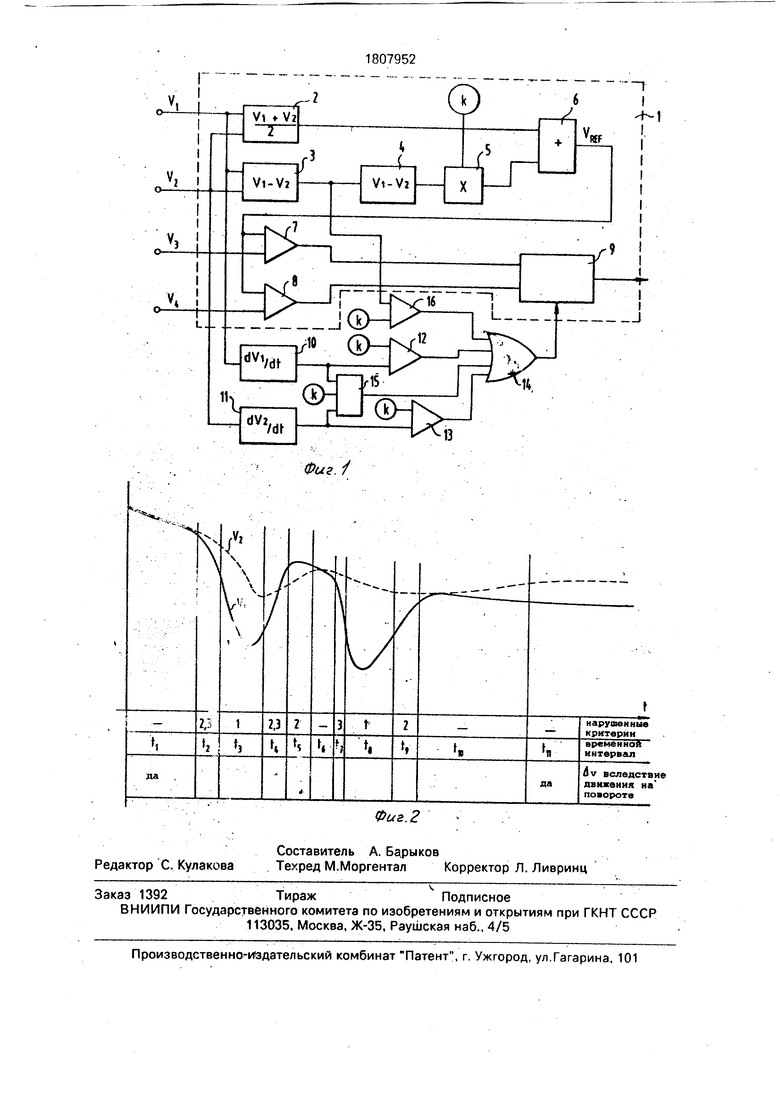
На фиг. 1 изображена принципиальная схема регулятора проскальзывания ведущих колес; на фиг.2 - диаграмма частот вра0 щения правого и левого передних колес транспортного средства без привода переднего моста при торможении с использованием противоблокировочного устройства и при движении на повороте.
5 Описывается двухосное четырехколесное транспортное средство с приводом заднего моста и без привода переднего моста. Итак, если речь идет о передних колесах, то всегда имеются в виду неведомые колеса При описании транспортного средства с
приводом на передние колеса следует использовать соответствующие выражения аналогично.
Регулятор проскальзывания ведущих колес имеет четыре входа измерительной цепи 1, на которые поступают измерительные сигналы от всех четырех колес. Каждый из этих сигналов соответствует окружной скорости того колеса, от которого он поступает. Сигнал Vi соответствует окружной скорости левого переднего колеса, сигнал V2 - окружной скорости правого переднего колеса, сигнал Уз - окружной скорости левого заднего колеса, а сигнал /4 - окружной скорости правого заднего колеса. В первом вычислительном блоке 2 образуется среднее арифметическое значение (Vi + V2)/2. Во втором вычислительном блоке 3 образуется разность Vi - V2. В третьем вычислительном блоке 4 образуется абсолютное значение исходного сигнала вычислительного блока 3. В четвертом вычислительном блоке 5 исходный сигнал вычислительного блока 4 умножается на постоянный коэффициент k. В пятом вычислительном блоке б исходный сигнал вычислительного блока 2 складывается с исходным сигналом вычислительного блока 5. Исходный сигнал вычислительного блока б представляет собой опорную скорость VRef, которая соблюдает следующее условие
VRef + K()
В двух блоках сравнения 7 и 8 сигналы Уз и соответственно V4 сравниваются с опорным значением VRef, в результате чего получаются сигналы 5з и соответственно $4, которые пропорциональны проскальзыванию левого и соответственно правого задних колес (в расчете на VRef). Эти сигналы поступают к регулятору 9, который в зависимости от значения проскальзывания регулирует мощность привода и/или торможения таким образом, что максимально допустимое проскальзывание не больше 3-4%. Пороговые значения проскальзывания уже заданы и не требуют изменения, так как опорное значение VRef изменяется в зависимости от радиуса кривизны поворота.
Как указано выше, поправочный коэффициент k, поступающий на вход множительного блока 5, является постоянным и зависит в первую очередь от базы, т.е. от расстояния между передними и задними колесами. Этот коэффициент является отрицательным, так что при движении на повороте опорное значение VRef всегда меньше, чем среднее арифметическое значение окружных скоростей обоих передних колес. Этим
достигается то, что при движении на повороте допустимое проскальзывание задних колес уменьшается, так что при движении на повороте имеются большие запасы адге- зионных сил для боковой устойчивости. 5Как указано выше, регулирование проскальзывания ведущих колес нельзя осуществить во время регулирования противоблокировочной системы. Поскольку при регулировании противоблокировочной
0 системы может иметься разница окружных скоростей левого и правого передних колес, следует обеспечить надежное различение трех возможных режимов движения, а имен5 но движение по прямой, движение на повороте и движение с регулированием противоблокировочной системы. Движение по прямой распознается по тому, что разница окружных скоростей обоих передних
0 колес равна нулю. Этот случай без проблем. В противоположность этому такая разница окружных скоростей может иметься как при движении на повороте, так и при движении с регулированием противоблокировочной
5 системы. Однако оба упомянутых режима движения можно распознавать на основании следующих критериев, причем движение на повороте имеет место в случае соблюдения всех следующих условий;
01. Частоты вращения обоих передних колес не должны отличаться друг от друга на любое значение. В качестве предельного значения выбирается значение, немного больше действительной разницы окружных
5 скоростей обоих упомянутых колес при движении на повороте, причем следует учесть максимально возможный угол поворота управляемых колес. На практике выбирается, предельное значение, составляющее при0 близительно 2 м/с.
2. Также ускорения обоих передних колес должны отличаться друг от друга только на незначительную величину. Предельное значение зависит в первую
5 очередь от возможных мешающих сигналов, появляющихся вследствие численного дифференцирования сигналов от чувствительных элементов. В остальном ускорения окружных скоростей колес при движении на
0 повороте являются в начале и в конце поворота минимальными.
3. Ускорение каждого переднего колеса не должно превышать заданное для него предельное значение. Максимальное и ми- 5 нимальное значения определяются максимально достигаемым ускорением и соответственно максимально достигаемым замедлением транспортного средства в процессе торможения, причем и здесь елеует учесть влияние возможных неисправостей.
Однако соблюдение всех указанных ус- овий само по себе не достаточно для наежного распознавания разницы в частоте вращения колес, обусловленной движением на повороте, так как и при торможении с спользованием противоблокировочного стройства в течение короткого времени могут быть соблюдены все указанные условия. ля надежного распознавания разницы в частоте вращения колес должны быть соблюдены все указанные условия в течение определенного времени. Практические опыы показали, что достаточен отрезок времени немМого больше 1 с. Выгодным оказался отрезок времени, составляющий 1,2 с.
Указанные критерии объясняются со ссылкой на фиг.2. Штриховая линия V2 показывает скорость правого переднего колеса, а сплошная линия Vi - скорость левого переднего колеса. Во временных интервалах ti-tio происходит торможение с использованием противоблокировочного устройства. Во временных интервалах t2, ta. t4. ts. t, te и tg соблюдено по меньшей мере одно из трех указанных условий (критерии 1,2 и 3), так что наверняка происходит торможение с использованием противоблокировочного устройства. Так, например, во временном интервале г ускорения обоих передних колес (наклон кривых) больше, чем предельное значение (критерий 3) и сверх того разница ускорений обоих передних колес больше, чем заданное значение (критерий 2).
В противоположность этому во временном интервале тд разница в частоте вращения обоих передних колес больше, чем заданное значение (критерий 1). На фиг.2 показано, какой из критериев в каком из временных интервалов нарушен.
В противоположность этому во временных интервалах te и tio не нарушено никакое из трех указанных критериев, хотя происходит не движение на повороте, а торможение с использованием противоблокировочного устройства. Здесь действителен четвертый критерий, согласно которому движение на повороте происходит наверняка только в случае, если никакой из трех указанных критериев не нарушен на период времени, превышающий приблизительно 1,2 с. Таким образом, регулятор проскальзывания ведущих колес застопорен и во временных интервалах te.tio- В противоположность этому во временных интервалах ti и tn соблюдены все четыре критерия, так что в этих временных интервалах допустимо регулирование проскальзывания ведущих
колес. Что касается оборудования, то схема распознавания торможения с использованием противоблокировочного устройства включает нижеуказанные блоки:
В двух дифференциаторах 10 и 11 определяются ускорения обоих передних колес. Исходные сигналы этих дифференциаторов сравниваются с заданным Пороговыми значениями в компараторах 12 и 13. Если ис0 ходные сигналы дифференциаторов 10 и 11 больше, чем заданные пороговые значения, то компараторы 12 и 13 отдают исходный сигнал, чем обнаружено, что нарушен критерий 3.
5 В вычитателе 15 исходные сигналы дифференциаторов 10 и 11 вычитаются один от другого и сравниваются с заданным пороговым значением. Если разница больше, чем заданное пороговое значение, то нарушен
0 критерий 2..
В компараторе 16 исходный сигнал вычислительного блока 3 сравнивается с заданным пороговым значением. Если исходный сигнал вычислительного блока 3
5 больше, чем заданное пороговое значение, то компаратор 16 срабатывает, чем обнаружено, что нарушен критерий 1.
Исходные сигналы блоков 12,13,15 и 16 можно обьединять в логической схеме ИЛИ
0 14 и подавать на один из управляющих входов регулятора, причем регулятор проскальзывания ведущих колес застопорен тогда, когда на выходе логической схемы ИЛИ 14 имеется сигнал.
5 В заключение следует еще указать, что постоянный коэффициент k (множительный блок 5) зависит не только от базы, но и от управляемости задних колес. В настоящее время большое количество конструкций за0 днего моста допускает некоторый поворот управляемых задних колес при движении на повороте. Поэтому целесообразно определить постоянный коэффициент k эмпирическим путем. Опыты показали, что в
5 транспортных средствах средней длины с нормальной управляемостью задних колес целесообразно использовать постоянный коэффициент k, составляющий приблизительно 0,7. Если используется постоянный
0 коэффициент k, составляющий 0,5, то имеется случай, в котором в качестве опорной скорости для заднего колеса выбрана скорость переднего колеса, находящегося на той же самой стороне. В определенных случаях
5 постоянный коэффициент k может составлять и больше чем 1.
Формула изобретения 1. Регулятор проскальзывания ведущих колес для транспортных средств, содержащий датчики частоты вращения ведущих и
ведомых колес транспортного средства, подключенные к входам блока управления, включающего компараторы, выходы которых подключены к логическим элементам ИЛИ, и исполнительное устройство, подключенное входом к выходу блока управления и связанное выходом с двигателем и/или тормозами ведущих колес транспортного средства, отличающийся тем, что, с целью повышения точности в работе, блок управления включает в себя первый вычислительный блок среднего арифметического значения скоростей, к которому подключены датчики частоты вращения ведомых колес транспортного средства, пер- вый вычитающий блок, образующий значение разности сигналов датчиков частоты вращения ведомых колес, соединенный с выходом вычитающего блока второй вычислительный блок, образующий абсолютное значение сигнала на своем входе, соединенный с выходом второго вычислительного блока умножающий блок, который умножает сигнал на своем входе на постоянный коэффициент, суммирующий блок, входы которого соединены соответственно с выходами умножающего и первого вычислительного блоков, два блока сравнения, один из входов которых соединены с выходом суммирующего блока, причем другие входы блоков сравнения соединены с соответствующими датчиками частоты вращения ведущих колес, а выходы блоков сравнения подключены к входам регулятора, два дифференциатора, входы которых соединены с датчиками частоты вращения обоих ведомых колес, выходы обоих дифференциаторов соединены каждый с одним входом одного из двух компараторов, причем другие входы обоих компараторов сое- динены каждый с соответствующим
датчиком постоянного значения, выход вычитающего блока соединен с одним входом третьего компаратора, другой вход которого соединен с соответствующим датчиком по5 стоянного значения, выходы обоих дифференциаторов соединены с вторым вычитающим блоком, имеющим три входа, причем третий вход соединен с соответствующим датчиком постоянного значения, и
0 выходы трех компараторов и второго вычитающего блока соединены с входами логического элемента ИЛИ, выход которого соединен с управляющим входом регулятора с возможностью выключения регулятора
5 в случае, если на выходе логического элемента ИЛИ имеется сигнал.
2. Регулятор по п.1, отличающийся тем, что постоянный коэффициент является отрицательным и составляет величину 0,5- 0 1, предпочтительно 0,7-0,8.
3. Регулятор по п.1, о т л и ч а ю щ и и с я тем, что он выполнен с возможностью включения при разнице между частотами вращения обоих неведомых колес меньше
5 заданного значения, разница между ускорениями обоих неведомых колес меньше заданного порогового значения, при абсолютном значении ускорения каждого неведомого колеса меньше заданного пре0 дельного значения.
4. Регулятор по п.З, отличающийся тем, что перечисленные условия, касающиеся разницы между частотами вращения неведомых колес, разница между ускорени- 5 ями неведомых колес и абсолютного значения ускорения каждого неведомого колеса, соблюдены в течение заданного отрезка времени.
5. Регулятор по п.З, отличающийся 0 тем, что заданный отрезок времени составляет 1-2 с, предпочтительно 1,2 с.
Фиг. 2
Использование: в транспортных средствах. Сущность изобретения: регулятор проскальзывания ведущих колес, с помощью которого ограничивается проскальзывание ведомых колес транспортного средства заданным значением, образует сигнал для опорной CKopocTiTfVRef) из среднего значения скоростей обоих неведомых колес за вычетом значения поправки, учитывающего абсолютное значение разницы скоростей обоих неведомых колес и поправочного коэффициента (к), учитывающего . 4 з.п.ф- лы, 2 ил.
Редактор С. Кулакова
Составитель А. Барыков
Техред М.МоргенталКорректор Л. Ливринц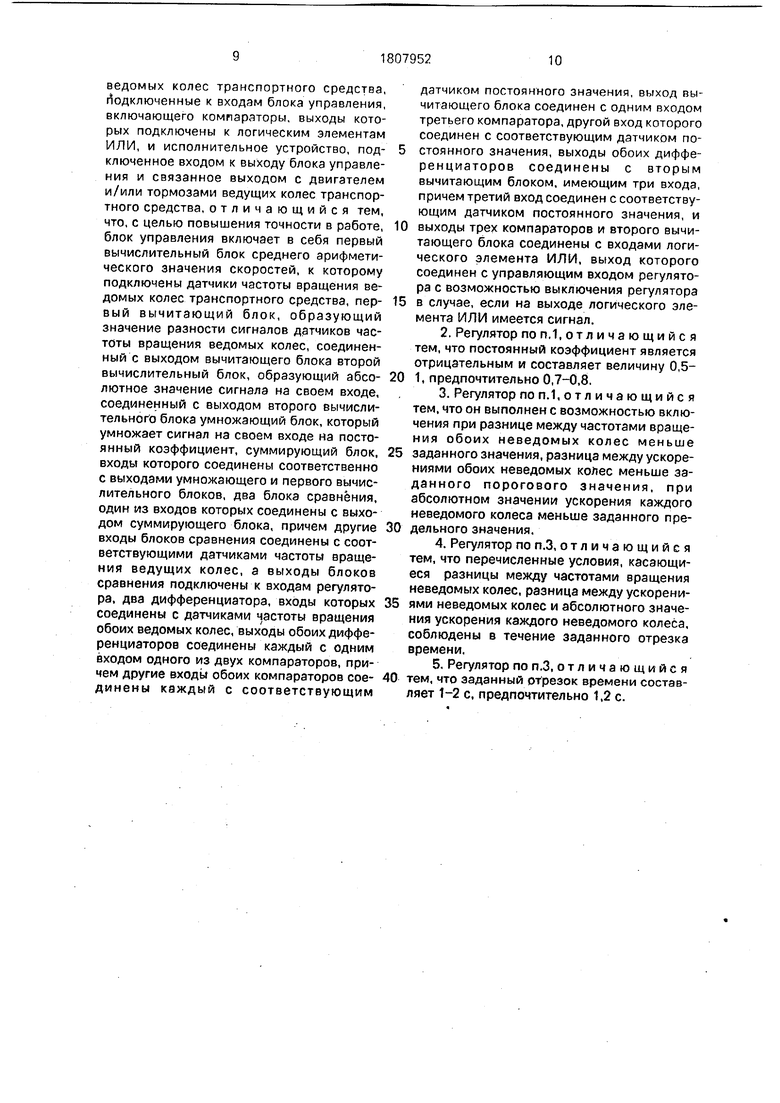
| Патент США № 4671373, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
