Изобретение относится к устройству или способу в соответствии с родовыми понятиями независимых пунктов формулы изобретения. Предметом изобретения является также компьютерная программа.
В случае использования грузового автопоезда необходимо знать распределение нагрузок на дорогу, передаваемых через оси транспортного средства, чтобы обеспечить на отдельных осях согласованные тормозные моменты. Распределение нагрузок на дорогу, передаваемых через оси транспортного средства, может быть распознано с использованием на осях сенсоров нагрузки. При отсутствии сенсоров нагрузки на ось соответствующее назначению распределение тормозной силы является затруднительным.
Исходя из этого, с помощью представленной здесь исходной идеи используют способ оценки распределения нагрузок на дорогу, передаваемых через оси транспортного средства, а также, наконец, соответствующую компьютерную программу в соответствии с главным пунктом формулы изобретения. С помощью мер, приведенных в зависимых пунктах формулы изобретения, могут быть реализованы предпочтительные усовершенствования и улучшения устройства, указанного в независимых пунктах формулы изобретения.
При вышедших из строя сенсорах нагрузки на ось и/или транспортных средств или транспортном средстве без таких сенсоров нагрузку на соответствующие оси можно определять с использованием вторичных физических величин. Поскольку нагрузка на ось сжимает пневматические шины колес оси, происходит изменение эффективного радиуса качения колеса в зависимости от нагрузки. Измененный радиус качения колеса выражен измененной скоростью вращения колеса. Скорость вращения может быть легко определена, например, с помощью сенсоров антиблокировочной системы.
На скорость вращения колеса дополнительно оказывают влияние воздействующие на колесо крутящие моменты или обусловленное крутящими моментами проскальзывание пневматических шин.
В случае представленной здесь концепции влияние крутящих моментов используют для получения заключения о нагрузке.
Представлен способ оценки распределения нагрузок на дорогу, передаваемых через оси транспортного средства, причем способ содержит этап определения, на котором с использованием величины проскальзывания и величины силы определяют, по меньшей мере, нагрузку на ось грузового автопоезда, причем величина проскальзывания характеризует проскальзывание между осью и следующей осью грузового автопоезда, а величина силы характеризует приводное усилие или замедляющую силу на оси.
Под грузовым автопоездом можно понимать автопоезд, который состоит из грузового автомобиля в качестве тягового транспортного средства и прицепа в качестве транспортируемого транспортного средства или седельный тягач в качестве тягового транспортного средства и седельный прицеп в качестве буксируемого транспортного средства. Нагрузка может представлять собой нормальную силу, то есть силу тяжести, действующую, таким образом, перпендикулярно площади контакта шины с дорогой. Величина проскальзывания может отображать разницу между скоростью вращения на рассматриваемой оси и второй скоростью вращения на оси отсчета.
Далее, нагрузку можно определить с использованием величины проскальзывания при свободном вращении. Величина проскальзывания при свободном вращении характеризует пробуксовку между осью и следующей осью в случае, если сила на обеих осях меньше порогового значения. Величина проскальзывания при свободном вращении не подвержена влиянию со стороны тягового усилия или замедляющей силы. Величина проскальзывания при свободном вращении может быть записана в запоминающее устройство. Величину проскальзывания при свободном вращении можно определить в случае отсутствия воздействия тягового усилия или замедляющей силы.
Способ может содержать этап распознавания, во время которого в процессе эксплуатации автопоезда определяют одно первое состояние транспортного средства и, по меньшей мере, одно второе состояние транспортного средства. В первом состоянии транспортного средства определяют первую величину проскальзывания и первую силу тяжести. Во втором состоянии транспортного средства определяют вторую величину проскальзывания и вторую силу тяжести. Величина проскальзывания при свободном вращении может быть определена с использованием первого состояния транспортного средства и второго состояния транспортного средства. На основании, по меньшей мере, двух точек в различных состояниях транспортного средства может быть описана взаимосвязь между проскальзыванием и силой. На основании взаимосвязи можно сделать заключение о проскальзывании при свободном вращении, которое зависит в основном от разности диаметров колес.
Второе состояние транспортного средства может быть определено, если между первым состоянием транспортного средства и вторым состоянием транспортного средства различие между правой величиной скорости вращения колеса оси и левой величиной скорости вращения колеса оси меньше предельного значения. Различие меньше предельного значения в случае, если грузовой автопоезд движется прямо и различие вызвано лишь различными давлениями воздуха в шинах и/или износом шин. В идеальном случае различие близко к нулю.
Второе состояние транспортного средства может быть определено, если проскальзывание между первым состоянием транспортного средства и вторым состоянием транспортного средства монотонно возрастает или уменьшается. При монотонно возрастающем или уменьшающемся проскальзывании проскальзывание либо возрастает, либо уменьшается.
Второе состояние транспортного средства может быть определено, если величина силы между первым состоянием транспортного средства и вторым состоянием транспортного средства монотонно возрастает или уменьшается. При монотонно возрастающей или уменьшающейся величине силы величина силы либо возрастает, либо уменьшается.
Второе состояние транспортного средства может быть определено при завершении монотонности. В частности, второе состояние транспортного средства может быть определено, если прекращается монотонное возрастание или уменьшение проскальзывания или монотонное возрастание или уменьшение величины силы.
Далее, нагрузка может быть определена с использованием величины жесткости проскальзывания оси. Величина жесткости проскальзывания характеризует величины жесткости проскальзывания колес осей. Жесткость проскальзывания отображает гибкость пневматических шин, вследствие которой в результате нагружения крутящим моментом шины работают с проскальзыванием. С помощью величины жесткости проскальзывания величину силы можно пересчитать в проскальзывание колес относительно опорной поверхности или проскальзывании колес при торможении.
Этот способ может быть имплементирован в программное или аппаратное обеспечение или в смешанной форме из программного обеспечения и аппаратного обеспечения в устройство управления.
Представленная здесь концепция создает, кроме того, устройство, которое выполнено для осуществления, управления или преобразования этапов вариант представленного здесь способа в соответствующих устройствах. Также с помощью этих вариантов исполнения изобретения в форме устройства может быть быстро и эффективно решена задача, положенная в основу изобретения.
Под устройством в настоящем случае можно понимать электрическое устройство, которое обрабатывает сигналы сенсоров и в зависимости от этого выдает сигналы управления и/или информационные сигналы. Устройство может содержать интерфейс, который может быть выполнен в соответствии с аппаратным обеспечением и/или программным обеспечением. При исполнении в соответствии с аппаратным обеспечением интерфейсы могут являться, например, частью так называемой системы ASIC (интегральная схема специального назначения), которая содержит разнообразные функции устройства. Однако также возможно, что интерфейсы представляют собой собственные, интегрированные переключательные схемы или состоят, по меньшей мере, частично из дискретных конструктивных элементов. При исполнении в соответствии с программным обеспечением устройства интерфейсы могут представлять собой модули программного обеспечения, которые присутствуют, например, в микроконтроллере наряду с другими модулями программного обеспечения.
Преимуществом является также программный компьютерный продукт или компьютерная программа с программным кодом, который может быть сохранен на носителе, который может быть считан машиной, жестком диске или оптическом запоминающем устройстве и использован для осуществления, преобразования и/или управления этапами способа в соответствии с одной из описанных выше форм исполнения, в частности, если программный продукт или программу выполняют на компьютере или в устройстве.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг. 1 - изображение грузового автопоезда с модулем для оценки распределения нагрузки на дорогу, передаваемой через оси транспортного средства в соответствии с примером исполнения;
фиг. 2 - изображение автопоезда в составе седельного тягача с полуприцепом и прицепа с модулем для оценки распределения нагрузки на дорогу, передаваемой через оси транспортного средства, в соответствии с примером исполнения;
фиг. 3 - блок-схема системы для оценки распределения нагрузки на дорогу, передаваемой через оси транспортного средства, в соответствии с примером исполнения; и
фиг. 4 - схема последовательности операций способа для оценки распределения нагрузки на дорогу, передаваемой через оси транспортного средства, в соответствии с примером исполнения.
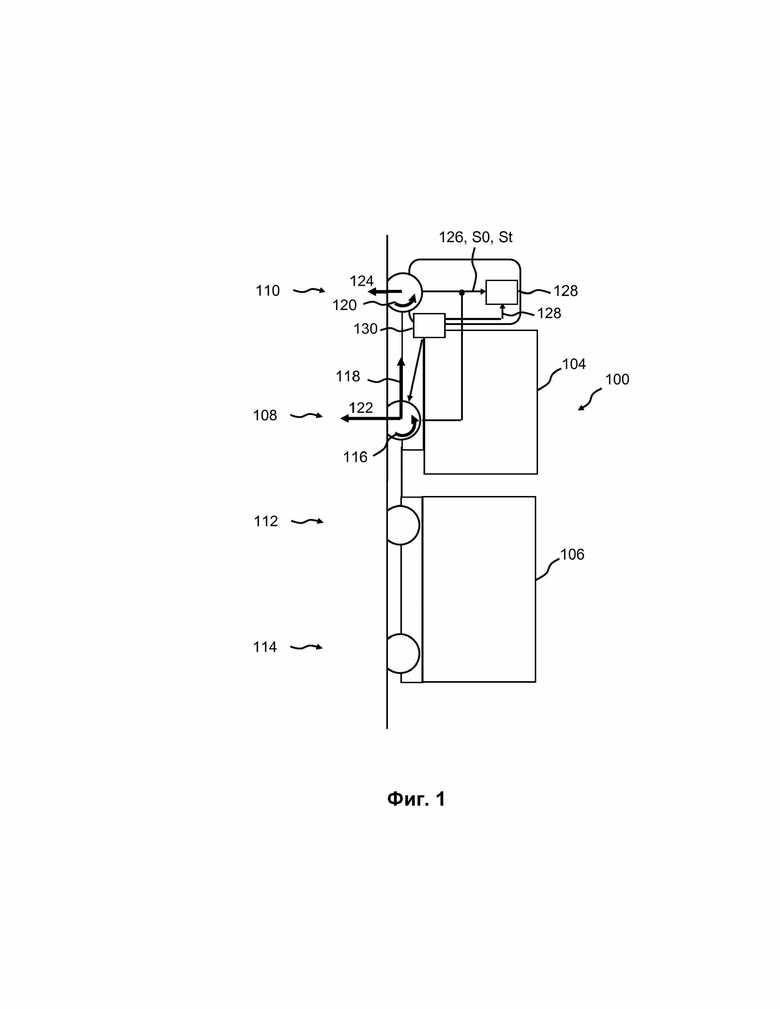
Фиг. 1 показывает изображение грузового автопоезда 100 с модулем 102 оценки распределения нагрузки на дорогу, передаваемой через оси транспортного средства, в соответствии с примером исполнения. Модуль 102 может быть назван также устройством 102. Модуль 102 является составной частью электронной тормозной системы грузового автопоезда 100. Грузовой автопоезд 100 состоит в данном случае из транспортного средства 104 в виде автомобиля-тягача или автомобиля-тягача и прицепа 106. Автомобиль-тягач 104 представляет собой грузовой автомобиль (LKW) и содержит грузовую платформу для транспортировки части груза грузового автопоезда. Остальную часть груза транспортируют на прицепе 106. Транспортное средство 104 в виде автомобиля-тягача содержит приводимый в действие задний мост 108 или заднюю ось 108 и неприводную, направляемую поддерживающую ось 110 или передний мост 100. Прицеп 106 содержит направляемую поворотную тележку 112 и неподвижную заднюю ось 114. Поворотная тележка 112 соединена через дышло с тягово-сцепным устройством автомобиля-тягача.
Передача крутящего момента на ведущий мост 108 осуществляют через трансмиссию. Крутящий момент приводит во вращение 116 колеса ведущего моста 108. За счет вращения 116 колеса катятся по опорной поверхности и на ведущем мосту 108 возникает тяговое усилие 118.
Поддерживающая ось 110 не соединена с трансмиссией. Колеса поддерживающей оси 110 приводятся во вращение 120 за счет движения грузового автопоезда 100.
Грузовой автопоезд 100 содержит тормоза на всех осях. Во время процесса торможения на всех осях действует не изображенная здесь замедляющая сила. Замедляющая сила действует в направлении, противоположном тяговому усилию.
Колеса грузового автопоезда 100 оснащены пневматическими шинами. В результате нагрузки на оси 108, 110, 112, 114 происходит деформация шин, в результате чего они во время вращения 116, 120 выполняют движение со смятием. При этом степень деформации зависит от нагрузки 122, 124 на отдельные оси 108, 110. В результате деформации возникают различные радиусы качения колес.
Вследствие различных радиусов качения при общей скорости грузового автопоезда 100 возникают различные скорости 116, 120 вращения колес осей 108, 110. Дополнительно происходит дальнейшая деформация гибких шин на приводной оси 108 в результате приводного крутящего момента. Приводной крутящий момент является следствием проскальзывания ведущих колёс относительно опорной поверхности. То, в какой мере происходит деформация шин под воздействием крутящего момента, можно отобразить с помощью величины жесткости проскальзывания. При отсутствии воздействия крутящего момента различные скорости 116, 120 вращения обуславливают проскальзывание со свободным качением. Проскальзывание ведущих колёс относительно опорной поверхности и проскальзывание при свободном вращении обуславливают в совокупности общее проскальзывание. Общее проскальзывание может быть измерено путем определения скоростей 116, 120 вращения.
Модуль 102 выполнен для оценки распределения нагрузок на дорогу, передаваемых через колеса грузового автопоезда 100. Для этого модуль 102 содержит устройство определения, которое, по меньшей мере, определяет нагрузку 122 на ведущий мост 108 с использованием величины 126 проскальзывания и величины 128 силы. Величина 126 характеризует общее проскальзывание между ведущим мостом 108 и передней осью 110. Величина 128 силы характеризует тяговое усилие 118 на ведущем мосту 108 или замедляющую силу. Величину 126 проскальзывания определяют, например, с помощью не изображенного здесь устройства управления транспортного средства с использованием скоростей 116, 120 вращения. Величина 128 силы может быть выведена, например, из мгновенной мощности привода.
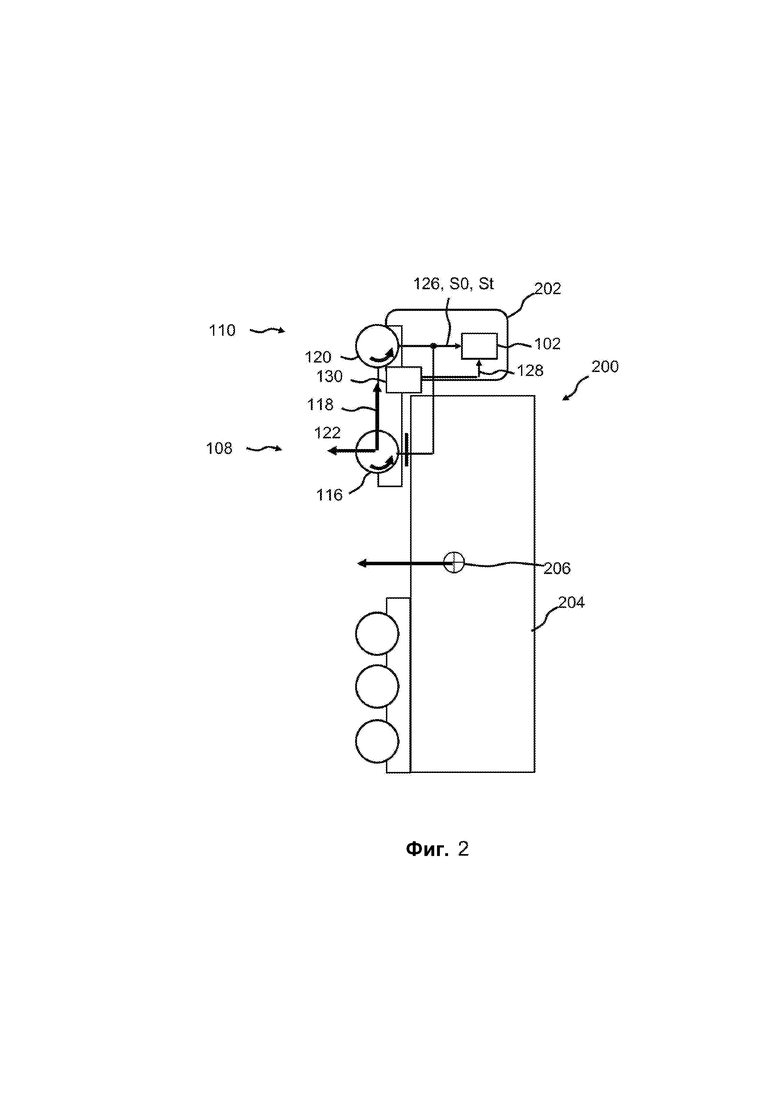
Фиг. 2 показывает в соответствии с примером исполнения изображение автопоезда 200 с седельным прицепом с модулем 102 оценки распределения нагрузок на дорогу, передаваемых через колеса транспортного средства. Изображение в основном соответствует изображению по фиг. 1. Автопоезд 200 с седельным прицепом состоит из седельного тягача 202 и полуприцепа 204. В случае автопоезда 200 весь груз транспортируют в полуприцепе. Седельный тягач не содержит собственной грузовой платформы. Часть массы груза опирается о седельный тягач.
Как и в случае фиг. 1, модуль 102 предназначен для оценки распределения нагрузок на дорогу, передаваемых через колеса автопоезда, с седельным тягачом и прицепом. Для этого модуль 102 содержит устройство определения, которое определяет, по меньшей мере, нагрузку 122 на ведущий мост 108 с использованием величины 126 проскальзывания и величины 128 силы. Поскольку седельный тягач не имеет дополнительного груза, нагрузку 122 в данном случае определяют на основании позиции 206 центра тяжести груза.
Фиг. 1 и 2 показывают схематические изображения оценки нагрузки на ось, базирующейся на проскальзывании ведущих колес относительно опорной поверхности или коэффициенте проскальзывания колес при торможении.
С помощью представленной здесь концепции может быть оценено состояние груза комбинации 100, 200 транспортных средств. Если транспортное средство 104, 202 представляет собой седельный тягач, то производят оценку позиции центра 206 тяжести груза седельного полуприцепа 204. Если тяговое средство 104, 202 представляет собой грузовой автомобиль, то производят оценку дополнительного груза транспортного средства 104. Состояние груза не оценивают, если оно может быть определено из хорошо оцененной общей массы общего транспортного средства 100, 200. В этом случае с помощью базирующейся на проскальзывании ведущих колес относительно опорной поверхности определяют жесткость пробуксовки приводных осей.
Кроме того, нагрузку автомобиля-тягача 104, 202 можно определить, если прицеп 106, 204 соединен с транспортным средством без использования сенсора нагрузки на ось. Знание ситуации с загрузкой транспортного средства 104, 202 необходимо для определения распределения тормозного усилия между частями автопоезда 100 или между осями 108, 110 транспортного средства 104, 202.
Представленная в данном случае функция оценивает нагрузку 122, базируясь на соотношениях скоростей вращения колес между осями 108, 110, которые измеряют с помощью сенсоров скорости вращения колес, если соотношение скоростей вращения колес соответствует пробуксовке осей 108, 110.
Проскальзыванием s 126 оси обозначают измеренную относительную разность скоростей между двумя осями 108, 110. Проскальзывание 126 оси складывается из проскальзывания s0 при свободном вращении и проскальзывания st ведущих колес относительно опорной поверхности.
Проскальзывание s0 при свободном вращении представляет собой относительную разность скоростей между двумя осями 108, 110, если на колеса рассматриваемых осей 108, 110 не действует тяговое усилие 118 или сила торможения. Это не физическое проскальзывание, однако разность скоростей обусловлена различными по величине путями или различающимися условиями качения.
Проскальзывание st ведущих колес относительно опорной поверхности представляет собой относительную разность скоростей между осью 110 со свободным качением и приводной осью 108 и образована крутящим моментом привода приводной оси 108.
Проскальзывание s axlelr представляет относительную разность скоростей вращения обоих колес оси 108, 110.
Тяговое усилие Flongitudinal 118 представляет собой сумму сил, действующих на колеса рассматриваемого заднего моста 108, которая образуется только вследствие ускоряющего крутящего момента.
Тяговое усилие 118 контролируют и ограничивают с помощью автоматической системы управления тягой. Между тем запоминают минимальное тяговое усилие 118 и после этого в качестве лимита приводного усилия для системы управления тягой используют половину величины минимума. Этот лимит увеличивают заранее определенными шагами, например, по 50 Н/с, если не происходит ограничения тягового усилия и фактическое тяговое усилие 118 превышает этот лимит.
Нормальная сила Fnormal 122 представляет собой действующую перпендикулярно дороге компоненту силы между дорогой и рассматриваемой приводной осью 108.
Жесткость проскальзывания колеса рассчитывают следующим образом:
Может быть произведен поиск дифференциального проскальзывания. Оценки динамической нагрузки 122 на ведущий мост 108 и жесткость проскальзывания ведущего моста 108 основаны на поиске пар точек силы проскальзывания/тягового усилия.
Цель поиска дифференциального проскальзывания заключается в выявлении состояний транспортного средства, при котором проскальзывание ведущих колес относительно опорной поверхности монотонно возрастает между обоими состояниями транспортного средства, приводное усилие 118 между обоими состояниями транспортного средства монотонно возрастает, эффективное тормозное усилие, прикладываемое к тормозной колодке не действует, тяговое усилие 118 не ограничено системой управления тягой, фактическая величина тягового усилия 118 лежит ниже лимита тягового усилия системы управления тягой и боковое проскальзывание осей для рассматриваемых ведущего моста 108 и поддерживающей оси 110 является неизменным. Это условие обеспечивает неизменность радиуса кривой транспортного средства 100, 200 и предотвращает проворачивание ведущих колес во время поиска разности. Дополнительно между обоими состояниями транспортного средства должны присутствовать заранее определенное минимальное различие, например, составляющее 0,5%, в проскальзывании ведущих колес относительно опорной поверхности, и заранее определенное минимальное различие в тяговом усилии 118, например, составляющее 500 Н. Второе состояние транспортного средства может быть принято в случае, если завершается монотонность проскальзывания ведущих колес относительно опорной поверхности или приводного усилия 118 или происходит боковое проскальзывание осей.
Поиск начинают сначала, если не произведено измерение тягового усилия 118 или измерено отрицательное тяговое усилие 118 или если фактическое тяговое усилие 118 меньше трети определенного последним максимума нагрузки. Проскальзывание ведущих колес относительно опорной поверхности первого состояния транспортного средства интерполируют/экстраполируют на нулевой точке, если определен переход тягового усилия 118 через нуль. Если переход через нуль тягового усилия 118 не найден и присутствует внешне рассчитанное проскальзывание s0 со свободным качением, то его используют вместо интерполированного/экстраполированного проскальзывания ведущих колес относительно опорной поверхности.
После успешного поиска дифференциального проскальзывания становятся известными проскальзывание s0 при свободном вращении, проскальзывание s осей, которое возникает при более высокой силе тяги, и более высокая сила Flongitudinal. С помощью также известной жесткости проскальзывания можно определить фактическую динамическую нагрузку 122 на ведущий мост 108.
Этот расчет производят, если качество базирующейся на общей массе оценки распределения нагрузок на дорогу, передаваемых через колеса транспортного средства, ниже заранее сконфигурированной предельной величины. В ином случае базирующаяся на проскальзывании ведущих колес относительно опорной поверхности оценка распределения нагрузок на дорогу, передаваемых через колеса транспортного средства, оценивает жесткость проскальзывания шин. Динамическая оценка нагрузки для ведущего моста использует оцененную жесткость проскальзывания шин. При ее отсутствии используют заранее сконфигурированную жесткость проскальзывания. В случае смены шин на ведущем мосту 108 также используют заранее сконфигурированную жесткость проскальзывания.
Производят оценку груза на транспортном средстве 104 или оценку позиции 206 груза на седельном полуприцепе 204.
Если транспортное средством 104, 202 представляет собой грузовой автомобиль и если оценивают фактическую динамическую нагрузку 122 на ведущий мост 108, то осуществляют оценку нагрузки на транспортное средство 104 в виде автомобиля-тягача посредством вызова инвертированной модели транспортного средства. Инвертированная модель транспортного средства рассчитывает неизвестные параметры транспортного средства, в этом случае нагрузку на транспортное средство 104, с помощью метода Ньютона-Рафсона с использованием известных параметров. Скользящая средняя величина взвешенной инверсной модели транспортного средства является результатом оценки нагрузки на автомобиль-тягач, если вес пропорционален дифференциальному проскальзыванию, которое является основой фактической динамической нагрузки на ось. При распознавании изменения полезной нагрузки вновь начинают расчет скользящей средней величины.
Если транспортное средство относится к транспортному средству 202 в виде автомобиля-тягача и производят оценку фактической динамической нагрузки 122 на ведущий мост 108, то оценку позиции 206 груза седельного полуприцепа 204 осуществляют посредством вызова инвертированной модели транспортного средства. Инвертированная модель транспортного средства рассчитывает неизвестные параметры транспортного средства, в данном случае позицию 206 груза седельного полуприцепа 204, при помощи метода Ньютона-Рафсона с использованием известных параметров. Скользящая средняя величина взвешенной инверсной модели транспортного средства представляет собой результат оценки позиции 206 груза седельного полуприцепа, если вес пропорционален дифференциальному проскальзыванию, который является основной для оценки фактической динамической нагрузки на ось. В случае распознавания изменения полезной нагрузки расчет скользящей средней величины начинают вновь.
Жесткость проскальзывания ведущих мостов 108 рассчитывают, если расчет распределения груза транспортного средства 104, 202 произведен с высоким качеством с помощью базирующейся на общей массе оценки нагрузки на ось. В результате этого динамические нормальные силы Fnormal 122 ведущего моста 108 также рассчитаны с помощью модели транспортного средства. Оценка жесткости проскальзывания ведущего моста 108 базируется на следующих уравнениях, которые основаны на двух состояниях транспортного средства из поиска дифференциального проскальзывания.

Разность обоих уравнений определена формулой:
Таким образом, из двух состояний транспортного средства поиска дифференциального проскальзывания можно рассчитать жесткость проскальзывания.

Скользящая средняя величина взвешенной жесткости Tss проскальзывания представляет собой результат оценки позиции груза седельного прицепа, при котором вес пропорционален базису дифференциального проскальзывания фактической динамической нагрузки на ось. При констатации факта смены шин скользящую оценку средней величины запускают вновь. Полученные данные о жесткости проскальзывания запоминают в стираемое программируемое ПЗУ, чтобы они были доступны для будущих динамических оценок нагрузки на ведущие мосты.
Взаимосвязь между соотношениями 126 скоростей между парами осей под нагрузкой зависит от известной геометрии транспортного средства, факторов торможения и неизвестной жесткости проскальзывания. Оценка груза использует эту взаимосвязь для определения груза. Для этого функция определяет неизвестные жесткости проскальзывания с использованием тех же взаимосвязей в обратной последовательности, если груз рассматривают как известный.
Представленная здесь функция является пассивным наблюдателем, который обладает в отношении активных решений регулирования, например, контроля проскальзывания, тем преимуществом, что она обеспечивает возможность регулирования тормозного усилия с помощью независимых функций, таких как контроль износа.
Взаимосвязь между нагрузкой и соотношениями 126 скоростей вращения колес выражена в динамической модели транспортного средства 104, 202. Функция решает эту взаимосвязь в каждом цикле задачи, например, через каждые 20 мс. Поскольку динамическая модель является слишком сложной для того, чтобы быть решенной аналитическим путем, решение производят с помощью цифровой функции Ньютона-Рафсона, которая является интерактивным средством определения корня алгоритма для скалярно-скалярных функций.
Алгоритм осуществляет поиск величины подлежащего определению параметра, при котором модель транспортного средства выдает те же соотношения 126 скоростей вращения колес, которые измеряют на транспортном средстве 104, 202 в рассматриваемый момент.
Протекает фаза изучения. Оценку параметров выполняют на ведущих мостах 108 в течение фаз привода. На свободно вращающихся или не являющихся ведущими осях 110 оценку параметров осуществляют в ходе фаз торможение. Оценку прерывают, если тангенциальная сила, действующая на колесо, меньше пороговой величины, например, 2000 Н.
Можно оценить соответственно один параметр. Оцененный параметр может представлять собой жесткость проскальзывания, если условия загрузки понимают как известные. Оцененный параметр может представлять собой нагрузку 122 на тяговом транспортном средстве, если присоединен подвешенный через дышло прицеп 106 и неизвестны условия загрузки. Оцененный параметр может представлять собой осевую позицию 206 центра тяжести седельного полуприцепа 204, если седельный полуприцеп 204 присоединен и его условия загрузки неизвестны.
Величины жесткости проскальзывания изучают по отдельным осям, если условия загрузки понимают как известные. Это относится к случаю, когда качество оценки компонентов базирующейся на общей массе оценки нагрузки на ось достигает заранее определенной пороговой величины, например, 95%. Качество оценки компонентов базирующейся на общей массе оценки нагрузки на ось, зависит от качестве оценки общей массы транспортного средства и условий, которые определяют, насколько хорошо на основании общей массы транспортного средства может быть определено условие загрузки тягача.
Используют следующую логику: условие загрузки известно, если транспортное средство 104, 202 движется в одиночку и известна общая масса транспортного средства. Условие загрузки известно, если автопоезд 100, 200 представляет собой грузовой автомобиль с прицепом 106 и обе части транспортного средства являются порожними. Условия загрузки известны, если присоединенный прицеп 106 представляет собой либо буксируемый с помощью жесткой сцепки прицеп 106 или седельный полуприцеп 204, оснащен электронной тормозной системой прицепа и через провод шины данных CAN принимают величины нагрузок на оси и если известна общая масса транспортного средства.
Жесткость проскальзывания зависит от типа шин или состояния шин. Поэтому при распознавании смены шин выявленную величину жесткости проскальзывания вновь сбрасывают к заранее определенной величине.
Для изучения загрузки или состояния загрузки необходимы изученные прежде величины жесткости проскальзывания. До момента определения этих величин жесткости проскальзывания используют заранее определенные величины. В случае грузового автомобиля с прицепом 106 определяют нагрузку на транспортное средство 104 в виде автомобиля-тягача. В случае транспортного средства 202 в виде автомобиля-тягача с седельным полуприцепом 204 определяют осевое расстояние между центром 206 тяжести и сцепным механизмом седельного устройства. Причина этого заключена в том, что сам автомобиль-тягач не содержит никакого полезного груза. Транспортное средство 202 в виде автомобиля-тягача нагружено седельным полуприцепом 204. Этот вид загрузки не является постоянным и зависит от динамики транспортного средства. По этой причине его нельзя использовать в качестве параметра транспортного средства.
Оценка загрузки выполняется относительно быстро, так как одновременно учитывают фазы привода. Поэтому состояние загрузки изучают в каждом цикле зажигания и сбрасывают его в случае констатации смены груза.
Происходит вывод фильтрации и качества. Все эти изученные параметры являются квазипостоянными. Поэтому для получения стабильных оценок для каждого параметра мгновенные оценки этих параметров фильтруют по осям с помощью взвешенных фильтров Лагранжа. Взвешивание отдельных оценок зависит от их квадратичного отклонения.
Качество оценки базируется на статистических расчетах. Квадратичные отклонения вырабатываются ответственными компонентами. В случае изучения жесткости проскальзывания возникает квадратичное отклонение оцененных жесткостей проскальзывания. Как и в случае изучения жесткости проскальзывания и нагрузки, возникает квадратичное отклонение оцененного диаметра колеса. В случае изучения нагрузки возникает квадратичное отклонение нагрузки транспортного средства 104, 202 в виде автомобиля-тягача. Эти квадратичные отклонения распространяются через модель транспортного средства. Поэтому в каждом цикле оценки может быть запрошено теоретическое квадратичное отклонение оценки нагрузки или центра 206 тяжести и обе оценки зависят от квадратичного отклонения величин жесткости проскальзывания, которые были использованы для оценки нагрузки.
Эти мгновенные квадратичные отклонения фильтруют с помощью фильтра оцененного параметрического значения с приведением к общей величине. Таким образом становится известным теоретическое квадратичное отклонение различных оценщиков, например, базирующихся на общей массе, на коэффициенте проскальзывания колес при торможении и на проскальзывании ведущих колес относительно опорной поверхности. Из этого вытекает квадратичное отклонение оцененной величины оценщика.
При этом n представляет собой количество обнаруженных точек.
С помощью этого метода естественным образом достигают того, что точки с более высокой погрешностью или с более высоким квадратичным отклонением оказывают меньший эффект на конечный результат. Различные оценки координируют к виду окончательной оценки. Окончательная оценка базируется на соотношении количества обнаруженных точек и квадратичном отклонении оценки. Чем выше эта величина, тем выше взвешенность оценки осей.
Координированное окончательно квадратичное отклонение оценок получают в ходе двух этапов. Сначала окончательное квадратичное отклонение оценки обобщают в форме взвешенной средней величины, а затем окончательное квадратичное отклонение оценки корректируют посредством квадратичного отклонения оценок, полученного с помощью различных основных значений различных оценок.
После статистического расчета в распоряжение получают окончательно оцененный параметр со своим квадратичным отклонением. На основании этого квадратичного отклонения оценки рассчитывают качество. Для этого используют интервал надежности, который характеризует, например, загрузку 1500 кг или смещение центра тяжести в 0,5 м. На практике это означает, что если квадратичное отклонение оценки равно интервалу надежности, то качество оценки составляет 68,3%.
Каждую изученную величину жесткости проскальзывания записывают в стираемое программируемое ПЗУ, чтобы она была в распоряжении в будущих фазах зажигания. Базируясь на основании этих записанных в память величин жесткости проскальзывания могут быть осуществлены следующие циклы изучения загрузки или состояния загрузки. Изученные загрузки не запоминают.
Согласование оцененных параметров с изменениями загрузки или с жесткостью проскальзывания происходит достаточно медленно вследствие мощных выходных фильтров. Для быстрого изучения значимых изменений, например, вследствие смены шин или изменения загрузки, в определенных ситуациях производят новый запуск фильтров. Запуск оценки загрузки запускают вновь при каждом зажигании или в случае, если модуль распознавания изменения загрузки сигнализирует об изменении нагрузки. Новый запуск оценки жесткости проскальзывания производят, если распознана смена шин на какой-либо оси.
Для представленной здесь концепции необходимо электрически перепрограммируемое постоянное запоминающее устройство. Кроме того, представленную здесь концепцию используют во время движения по кривой для исключения ошибок вследствие различных боковых проскальзываний. Таким же образом представленную здесь концепцию реализуют только в состоянии выше минимальной скорости во избежание определения параметров в диапазоне ниже скорости воздушного зазора.
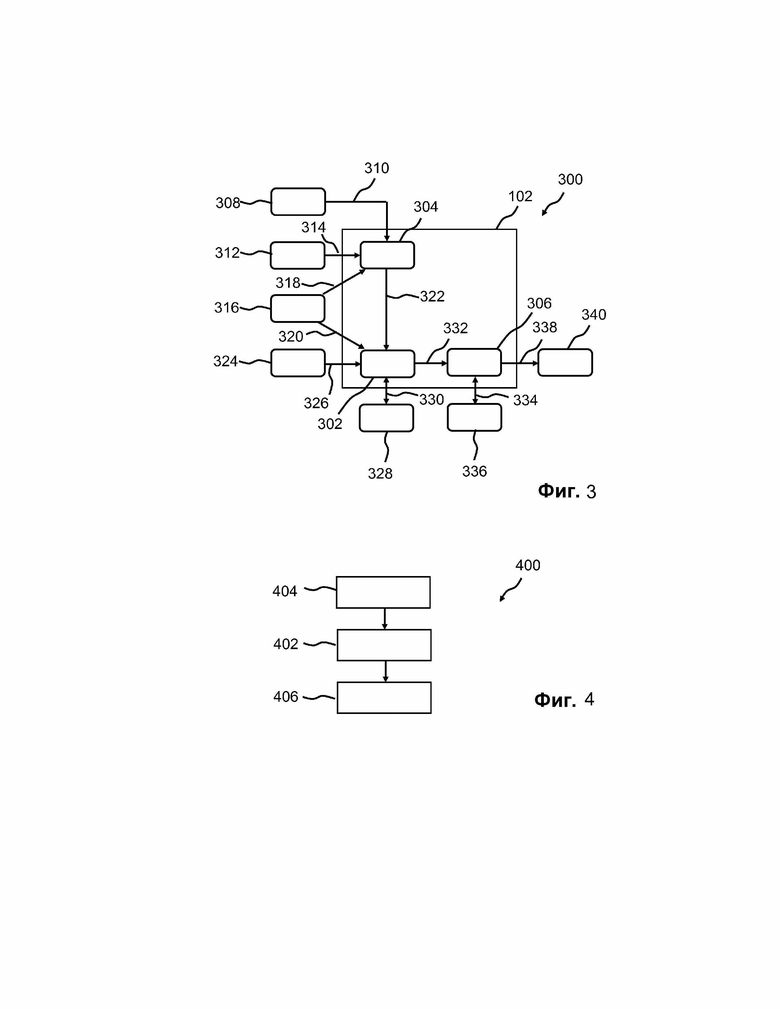
Фиг. 3 показывает блок-схему системы 300 для оценки распределения нагрузки на ось в соответствии с примером исполнения. Модуль 102, как он изображен, например, на фиг. 1 и 2, является составной частью системы 300. В настоящем случае модуль 102 содержит устройство 302 определения, координатор 304 фаз изучения и выходной фильтр 306. В данном случае изображенная система 300 содержит другие модули. Модуль 308 распознавания изменения загрузки вырабатывает информацию 310 об изменении загрузки для координатора 304 фаз изучения. Модуль 312 компенсации диаметра колеса вырабатывает информацию 314 о смене шин для координатора 304 фаз изучения. Модуль 316 оценки общей массы предоставляет информацию 318 о качестве для координатора 304 фаз изучения. Помимо этого модуль 316 оценки общей массы предоставляет информацию 320 об общей массе для устройства 302 определения. Координатор 304 фаз изучения предоставляет контрольную информацию 322 для устройства 302 определения с использованием информации 310 об изменении загрузки, информации 314 о смене шин и информацию 318 о качестве. Модуль 324 фильтра скорости вращения колес предоставляет для устройства 302 определения информацию 326 о скорости вращения колес. Устройство 302 определения выполнено для расчета или решения модели 328 транспортного средства. Для этого производят согласование параметров 330 модели 328 транспортного средства и оценку неизвестных параметров. В данном случае параметры 330 включают в себя нагрузку, величины жесткости проскальзывания и информацию 326 о скорости вращения колес. Оцененные параметры 332 фильтруют с помощью выходных фильтров 306. Выходной фильтр 306 предоставляет фильтрованную информацию 334 о жесткости проскальзывания для запоминающего устройства 336. Кроме того, выходной фильтр 306 предоставляет фильтрованную информацию 338 для модуля 340 координации загрузки.
Фиг. 4 показывает схему последовательности операций способа 400 для оценки распределения нагрузки на оси в соответствии с примером исполнения. Способ 400 может быть осуществлен, например, с помощью модуля, изображенного на предшествовавших фигурах. Способ 400 содержит этап 402 определения. На этапе 402 определения с использованием величины проскальзывания и величины силы определяют, по меньшей мере, нагрузку на одну ось груз грузового автопоезда. При этом величина проскальзывания характеризует проскальзывание между осью и одной следующей осью грузового автопоезда. Величина силы характеризует приводную силу или замедляющую силу на оси.
В одном примере исполнения этапу 402 определения предшествует этап 404 распознавания. На этапе 404 распознавания определяют величину силы и величину проскальзывания для грузового автопоезда. В частности, определяют, по меньшей мере, две различные пары величин из соответственно одной величины силы и одной величины проскальзывания. С использованием пар величин определяют, например, путем экстраполяции, величину проскальзывания при свободном вращении, которая характеризует приводную силу или замедляющую силу. Величину проскальзывания при свободном качении используют на этапе 403 определения, чтобы определить нагрузку.
На этапе 404 распознавания пары величин могут быть определены в случае, если соответствующая величина силы и альтернативно или дополнительно соответствующая величина проскальзывания отвечают определенным критериям. Например, для получения пригодных к использованию величин проскальзывания распознавание может быть прервано во время движения грузового автопоезда по кривой. Таким же образом между парами величин можно заранее задать минимальное различие величины проскальзывания и/или величины силы. При этом можно также заранее задать условие, при котором между рассмотренными парами величины величина проскальзывания и/или величина силы монотонно возрастают или уменьшаются. В частности, вторую пару величин можно определить затем в случае, если прекращается монотонное возрастание или уменьшение величины проскальзывания и/или величины силы.
В одном примере исполнения способ 400 содержит этап 406 использования, следующий за этапом 402 определения. На этапе 406 использования определенную нагрузку на отдельные оси используют для распределения тормозной силы грузового автопоезда. За счет этого можно осуществить боле сильное торможение сильно нагруженной оси по сравнению со слабо нагруженной осью без различающейся блокировки колес осей при процессе торможения. Таким образом, затормаживание грузового автопоезда может осуществить с минимально возможным тормозным путем.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНАЦИЯ ДОРОЖНОГО АВТОПОЕЗДА, В ЧАСТНОСТИ, В ВИДЕ ДЛИННОЙ КОМБИНАЦИИ АВТОМОБИЛЕЙ ПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ | 2017 |
|
RU2747393C2 |
| Прицеп автопоезда | 2018 |
|
RU2676402C1 |
| Автопоезд | 1981 |
|
SU998206A1 |
| СИСТЕМА И СПОСОБ ПОДДЕРЖКИ ВОДИТЕЛЯ ГРУЗОВОГО АВТОМОБИЛЯ И ГРУЗОВОЙ АВТОМОБИЛЬ | 2015 |
|
RU2693422C2 |
| БОЛЬШЕГРУЗНЫЙ АВТОПОЕЗД | 2022 |
|
RU2791699C1 |
| Устройство для буксировки бортового полуприцепа | 2021 |
|
RU2768081C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ИСПЫТАНИЯ ТОРМОЖЕНИЯ НА АВТОМОБИЛЯХ С ПРИЦЕПОМ И/ИЛИ ПОЛУПРИЦЕПОМ | 2011 |
|
RU2487807C2 |
| СЕДЕЛЬНО-СЦЕПНОЕ УСТРОЙСТВО | 2007 |
|
RU2361748C1 |
| Саморазгружающийся блоковоз | 1989 |
|
SU1689186A1 |
| Автопоезд для перевозки сыпучего груза | 1983 |
|
SU1119882A1 |
Способ (400) оценки распределения нагрузки на оси грузового автопоезда (100, 200) содержит этап (402) определения, на котором определяют по меньшей мере нагрузку (122) на одну ось (108) грузового автопоезда (100, 200) с использованием величины (126) проскальзывания и величины (128) силы. Величина (126) проскальзывания характеризует проскальзывание между осью (108) и следующей осью (110) грузового автопоезда, а величина (128) силы характеризует тяговое усилие или замедляющую силу (118) на оси (108). На этапе (402) определения, далее, определяют нагрузку (122) с использованием величины (s0) проскальзывания при свободном качении, причем величина (s0) проскальзывания при свободном качении характеризует проскальзывание между осью (108) и следующей осью (110), если сила (118) на обеих осях (108, 110) меньше предельного значения. Обеспечивается быстрая и точная оценка распределения нагрузки на оси грузового автопоезда. 2 н. и 6 з.п. ф-лы, 4 ил.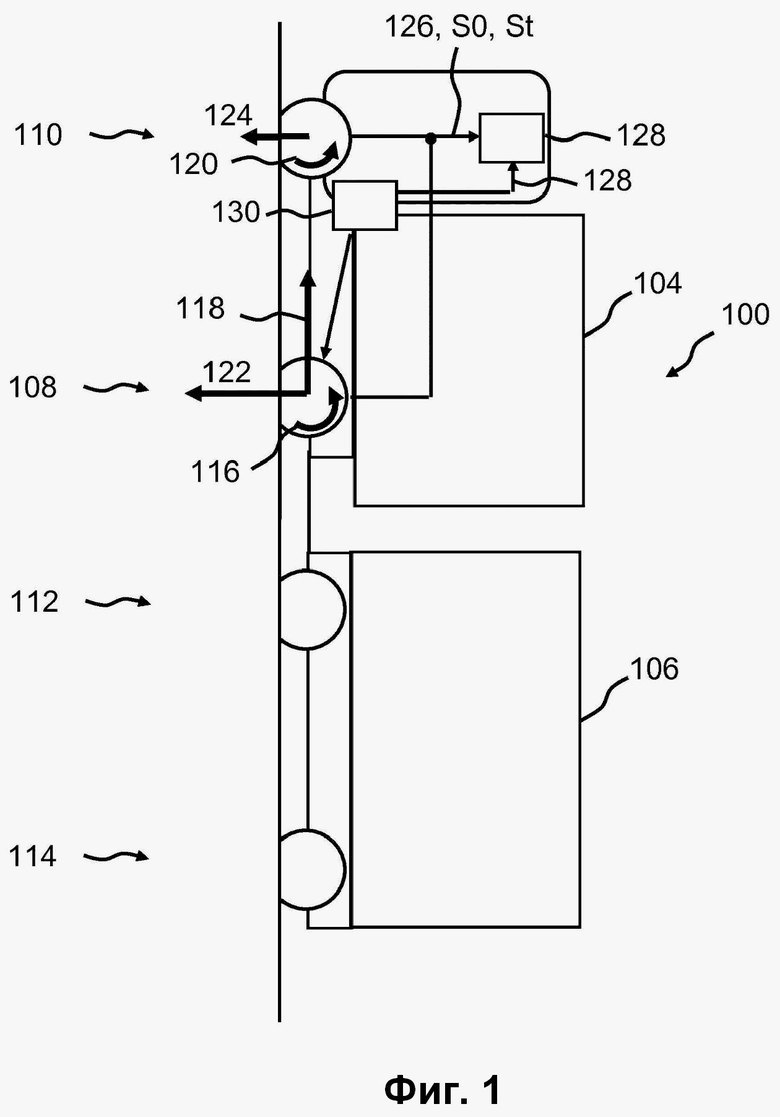
1. Способ (400) оценки распределения нагрузки на оси грузового автопоезда (100, 200), причем способ (400) содержит этап (402) определения, на котором определяют по меньшей мере нагрузку (122) на одну ось (108) грузового автопоезда (100, 200) с использованием величины (126) проскальзывания и величины (128) силы, причем величина (126) проскальзывания характеризует проскальзывание между осью (108) и следующей осью (110) грузового автопоезда, а величина (128) силы характеризует тяговое усилие или замедляющую силу (118) на оси (108), отличающийся тем, что на этапе (402) определения, далее, определяют нагрузку (122) с использованием величины (s0) проскальзывания при свободном качении, причем величина (s0) проскальзывания при свободном качении характеризует проскальзывание между осью (108) и следующей осью (110), если сила (118) на обеих осях (108, 110) меньше предельного значения.
2. Способ по п. 1, отличающийся тем, что содержит этап (404) распознавания, на котором в процессе эксплуатации грузового автопоезда (100, 200) распознают первое состояние транспортного средства и по меньшей мере одно второе состояние транспортного средства, причем в первом состоянии транспортного средства распознают первую величину (126) проскальзывания и первую величину (128) силы и во втором состоянии транспортного средства распознают вторую величину (126) проскальзывания и вторую величину (128) силы, причем величину (s0) проскальзывания при свободном качении распознают с использованием первого состояния транспортного средства и второго состояния транспортного средства.
3. Способ по п. 2, отличающийся тем, что на этапе (404) распознавания второе состояние транспортного средства распознают, если между первым состоянием транспортного средства и вторым состоянием транспортного средства различие между правой величиной (116) скорости вращения колес оси и левой величиной (116) скорости вращения колес оси (108) меньше предельного значения.
4. Способ по п. 2 или 3, отличающийся тем, что на этапе (404) распознавания второе состояние транспортного средства распознают, если проскальзывание между первым состоянием транспортного средства и вторым состоянием транспортного средства монотонно возрастает или уменьшается.
5. Способ по любому из пп. 2-4, отличающийся тем, что на этапе (404) распознавания второе состояние транспортного средства распознают, если величина (128) силы между первым состоянием транспортного средства и вторым состоянием транспортного средства монотонно возрастает или уменьшается.
6. Способ по п. 4 или 5, отличающийся тем, что на этапе (404) распознавания второе состояние транспортного средства распознают при завершении монотонности.
7. Способ по любому из пп. 1-6, отличающийся тем, что на этапе (402) определения, далее, определяют нагрузку (122) с использованием величины жесткости проскальзывания оси (108), причем величина жесткости проскальзывания характеризует величину жесткости проскальзывания колес оси (108).
8. Устройство (102) оценки распределения нагрузки на оси грузового автопоезда, предназначенное для осуществления способа (400) по любому из пп. 1-7.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| РОТОРНАЯ МАШИНА | 2007 |
|
RU2371586C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| DE 102008003206 А1, 04.01.2008. | |||

